
- 1uniapp 开发的H5 微信公众jssdk验签 invalid signature的问题_uniapp 微信公众号 签名失败
- 2Linux_linux局域网共享cpu
- 3鸿蒙底层替换安卓,全面上线!华为鸿蒙新消息传来,这是要彻底替换安卓
- 4推荐收藏 | 机器学习的知识点,全在这篇文章里了
- 5课程笔记:二叉树的顺序存储结构和遍历算法_二叉树顺序存储前序遍历
- 6入行 15 年,我还是觉得编程很难
- 7python 绘图及可视化_python 主窗口绘图
- 8java:利用for循环做个简易的登录系统(键盘输入+用到equals)_java使用for循环登录页面
- 9消灭重复工作-使用Python 3将数据自动录入到软件中_用python可以实现把表格的数据自动输入到指定系统里面吗
- 10华为fastboot查询版本_【干货】教你判断小米和华为手机bootloader是否解锁
评述6种室内定位技术的底层原理及未来展望_多径辅助室内定位
赞
踩
从古至今,人类始终关心一个颇具哲学意味的问题——“我在哪里”。从千年前的人类在夜空下遥望星河,到依靠经验和模糊的观测绘制的初具现代化意味的地图,再到近现代人类在计算机技术、无线通信技术甚至空间技术的帮助下,不断探索更准确、高效地获取位置信息的途径,人类在高精度定位技术、方法和系统的尝试与研究上从未停止。
现如今,人类拥有了四大全球卫星定位系统,在地面逐步建立建成了5G 移动通信系统,室内、室外高精度定位早已成为一项不可或缺的基础技术,并在各行各业(包括工业、医疗、商业以及生活服务等)中发挥重要作用。本文将从定位技术、定位方案和定位系统三个维度,按定位精度、适应性、实时性、成本、可用性、网络一体化程度不同角度,评述分析6种室内定位技术的底层原理,对未来定位网络发展方向做出演进预测。

1.ToF/ToA
ToF(time of flight)或ToA(time of arrival)定位方法被称为“飞行时间”或“到达时间”定位方法。ToA 定位方法原理如图1 所示,依靠测量电磁波的传播时间并换算成传播距离,解算待定位点的准确位置。
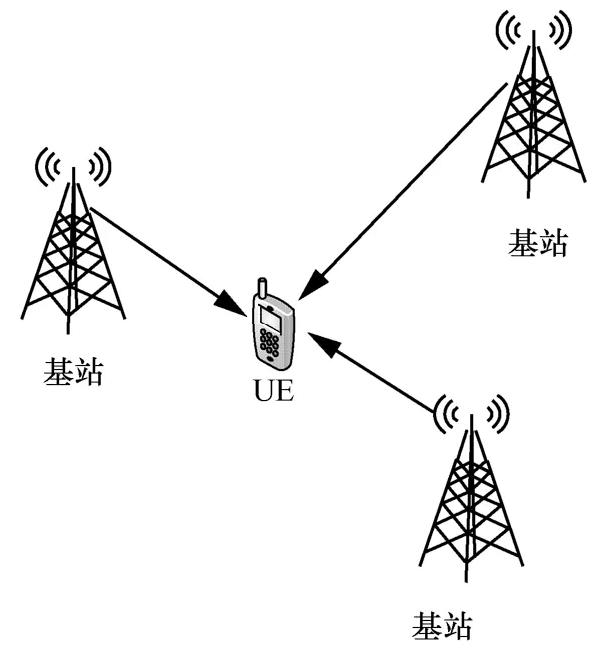
图1:TOA定位方法原理
此方法模型结构简单,易于理解,但在实际应用中存在明显缺点:1) 严重依赖时间同步的精度,在非实验室的场合下,待测节点与已知节点的高精度时间同步不具备实现条件;2) 数学模型基于电磁波无障碍传播的假设,当电磁波传播路径中包含折射、反射或绕射时,计算出的距离将包含误差,此类误差也被称为非视距(NLOS,non line of sight)误差。
2.TDoA
TDoA(time difference of arrival)定位方法被称为“到达时间差”方法。如图2 所示,在ToF 方法的基础上改用两路信号到达时间之差作为基本观测量,代入双曲线方程,则待测节点应位于多条双曲线(面)的交点处。

图2 TDoA 定位方法原理
TDoA 定位方法相比于ToA 方法具有的显著优势在于其不需要待测节点与各基站时钟同步,极大地放宽了此方法在实际工程中的应用条件,简化了系统结构。但此方法仍属于测距类方法,依赖电磁波的无障碍直射传播条件,仍会受到NLOS 误差的影响。
3. RToF
RToF(round-trip time of flight)定位方法,即“往返飞行时间”定位方法,原理如图3 所示。其类似于雷达测距原理,以测得信号的往返时间作为基本观测量,转换为传播距离,解算待测节点的坐标。

图3 RToF 定位方法原理
RToF 方法在信号中加入时间戳,基站收到终端发出的定位信号后立刻做出应答,故终端收到应答信息时可以获得信号往返时间。此方法类似于ToA,仍会受到NLOS 误差的影响。此外,基站在接收并应答信号的过程中所产生的网络时延可能导致较大误差。值得注意的是,此方法本质上需要双向通信,因此不适合密集型定位应用。
4. RSSI
RSSI(received signal strength indicator)定位方法,即“信号强度指标”定位方法,原理如图4 所示。其利用电磁波在空间中的衰落模型,建立信号强度观测量与距离之间的对应关系,进行定位解算。电磁波在空气中的传播损耗模型与其频率相关,一般认为满足如下模型。
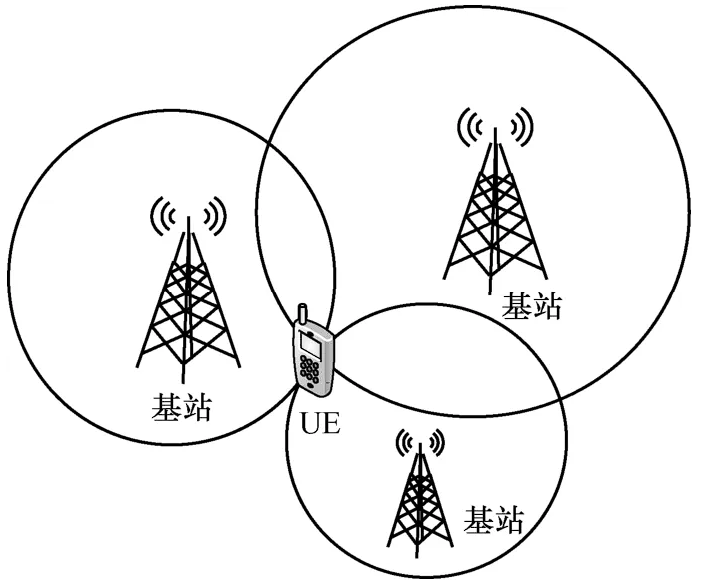
图3 RSSI 定位方法原理

其中,L为功率衰减值,PRX为接收功率,PTX为发射功率,GRX为接收天线增益,GTX为发射天线增益,r为传播距离。此方法优点在于结构简单,计算复杂度低,且不需要任何时间同步。但在现实情况中,电磁波环境极其复杂,传播过程受室内物品摆放、墙体遮挡以及人员走动等诸多因素影响,多径效应严重,定位效果不够理想。虽然可以配合滤波算法或迭代算法来提升精度,但如此又会增加计算复杂度,降低定位结果实时性。
传统化工厂蓝牙LoRa定位方案用的就是RSSI定位方法。
5. AoA
AoA(angle of arrival)定位方法,即基于信号到达角度的定位方法,通过阵列天线获取到达信号的相位差,换算成到达角度。AoA 定位方法原理如图5 所示,多个基站与待测点的径向连线交点,即为未知节点位置。此方法优势在于精度较高,所需基站数量少,不需时钟同步。但AoA 测角需使用昂贵的阵列天线;信号解算计算复杂度高,难以支撑大容量、高并发的定位场景;此外,室内环境中多径效应严重,复杂的解相干算法进一步增加了计算复杂度。

图5 AoA 定位方法原理
6. Fingerprint
Fingerprint 定位方法,即基于信号指纹的定位方法,原理如图6 所示。此方法不需要解算,其基本思想在于:离线定位阶段,事先标定待测区域的标记点并采集该点处的环境指纹信息,建立离线指纹库;在线定位阶段,通过实时获取待测点的环境信息并与离线指纹库中的数据项进行匹配,得到待测点的位置。人们可以选择RSSI、信道状态信息(CSI,channel state information)或其他物理量作为指纹。在无线通信网络环境中,同一个待测定位点往往会收到多个基站(已知节点)发出的信号。并且,这些信号的RSSI 或CSI 受传输距离、传播路径以及遮挡物等诸多因素影响,结果也不尽相同;将不同的特征组合在一起,即具备了区分各个不同待测定位点的能力。由于CSI 比RSSI 可以展示出各个信道背后的相位响应和振幅响应,CSI 指纹可以获得比RSSI 更好的时间分辨率、频率分辨率和稳定性。在线定位阶段中部分主流匹配算法及其对比分析如表1 所示。
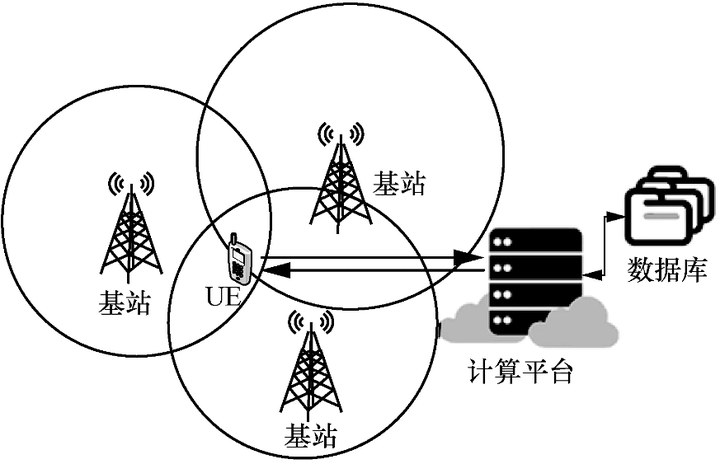
图6 指纹定位方法原理
此方法优点在于不需要信号解算,可以通过更密集地布置指纹采集点来提升定位的分辨精度、不受NLOS 误差影响。缺点是离线采集指纹阶段时间和人力成本较高;环境、物品、人员等因素的变化都会对信号采集、匹配造成干扰,不适用于动态环境和人员密集场所。
高精度定位技术分类如图7 所示。


6种定位方法的优缺点对比
7. 市面主流定位方案所对应的技术方案
| 定位系统 | 定位技术 | 精度 | 部署成本 | 实时性 | 覆盖范围 | 稳健性 |
| 5G定位 | AOA/AOD | 亚米级 | 与通信网共用 | 高 | 中 | 中 |
| 蓝牙定位 | RSSI/AOA | 米级/厘米级 | 低/高 | 中 | 小 | 高 |
| UWB定位 | TOF/TDOA/AOA | 厘米级 | 高 | 中 | 中 | 中 |
| WIFI定位 | 指纹定位 | 米级 | 中 | 高 | 小 | 低 |
8. 总结:挑战、机遇和前进方向
从“仰望星空”到“脚踏实地”,人类在室内外精确定位领域进展快速,成果颇丰。如今,5G网络基建发展迅速,北斗三号系统全球覆盖运行,6G 网络环境酝酿正如火如荼,未来网络面临着新的挑战、机遇,本文提出如下4 个方面的挑战、机遇和前进方向,供读者参考。
8.1 室内外联合定位——出入场景无缝切换
未来无线定位技术将向室内室外跨场景、跨区域联合定位与无缝切换的方向演进。如今,室外定位领域以卫星信号广域覆盖为主流解决方案,室内定位则呈现出百家争鸣、百花齐放的局面。室外地图以道路、建筑、车道和交通规则为主要元素,室内地图则需要建立三维立体模型,提供直观的楼层信息,并且包含更多的区域功能数据、商品或服务数据、人员数据,但二者之间仍未能实现完全的网络互连、数据融通。
对于未来智慧机场、智慧城市等场景,定位系统应融合室外行车路线、室内步行路线、地下车位信息、楼层信息、商户商品位置以及其他多元异构数据,为用户提供室内外一体化导航等服务。也即,在未来智慧城市的应用场景下,用户从离开住所至抵达目的地的全过程中,应当获得“门到门”的位置信息服务。另一方面,服务提供商也需要获得更全面精准的用户信息和管理数据,从而在服务调整和精准营销等商业行为中获得优势和助益。
8.2 5G 赋能传统定位技术——泛在融合定位
现如今,多种不同的定位/通信网络共存,其制式、技术各不相同,导致其在定位性能、覆盖范围、功耗成本等方面也各具优劣。5G 网络设施可为各类异构网络和不同制式的智能设备提供泛在连接,以融汇不同定位技术、方案,实现优势互补、融合赋能。
例如,5G 网络具有大带宽、低时延以及广域连接的能力和特点,而基于AoA 方法的蓝牙5.1 定位技术精度高,但通信能力不足。因此提出融合定位解决方案,使5G 与蓝牙融合布站、共用资源,将高精度定位数据通过高速网络传输,解决海量应用下通信导航一体化的需求。还可结合边缘计算、雾计算等其他智能技术,使5G 网络为传统定位技术助力、赋能。
8.3 高度一体化网络——在线即在位
网络发展迅速,先后出现了通信网、授时网、计算机网、传感器网、定位导航网等多种用途类别的网络系统。但之所以网络种类繁多,是因为网络技术及通信技术不够发达,现实世界中主体的信息无法由统一渠道表达,只能被迫拆分、切片后,由不同的专用网络传输。因此,这些系统各自采用不同的技术原理,承担着不同的功能任务,彼此相对独立割裂。
本文认为,未来网络演进将弥合技术壁垒、跨越制式障碍、融合多种能力,以“一网”代替“多网”,以“高度一体化网络”实现“全维度”的主体信息表示——“在线即在位”。
网络的本质在于信息的传递和交流,解决对象传输过程中“Who”“What”“How”“When”和“Where”5 个关键问题。随着网络和通信技术的不断发展与融合,网络技术和通信机制必将由割裂走向统一,即“高度一体化网络”即为“How”这一关键问题的最终答案。
7.4 网络安全保护新内涵——全知网下的个人位置隐私保护
在未来网络中,“在线即在位”,每个个体都将不间断地接入网络,其生成的高精度位置数据、状态数据、财务数据,甚至生物信息都将被网络所感知、记录,个人将处在“全知网”中,即个人信息全感知、全记录。这些信息的存储、传输与管理,无疑会带来隐私信息保护以及信息财产安全等全新问题。例如,通过个人行动轨迹,可以精确获得一系列隐私敏感数据,刻画出个体的生活习惯、教育情况、收入情况等。因此,未来网络在不断被赋予更强大的能力的同时,也需要人们提供更可靠的全知网隐私保护技术、完备的全知网监控体制和精妙的全知网管理智慧,确保未来网络为人类文明进步做出稳定而卓越的贡献。

