
- 1uniapp 微信小程序:RecorderManager 录音DEMO_微信小程序录音机样式
- 2YOLOv8改进 添加大核卷积序列注意力机制LSK_大核卷积注意力机制
- 3数据结构学习笔记——查找算法中的树形查找(二叉排序树)_二叉排序树的平均查找长度
- 4int,long,long long类型的范围
- 5怎样设置网络工作组计算机,如何建立计算机工作组?
- 6The MathType DLL cannot be found.问题解决方法
- 7阿里巴巴中间件性能挑战赛(RPC篇 同步阻塞模型)_com.alibaba.middleware
- 8毕业设计:python新能源汽车数据分析可视化系统+Django框架(源码+文档)_新能源汽车数据分析可视化毕业设计
- 9UE5俯视角游戏案例代码查看
- 10【无标题】_大厂机试是acm吗
图像无参考评价模型BRISQUE原理简介以及Python(Pytorch)实现
赞
踩
0 引言
自然场景统计(NSS)经常被应用于图像的质量评价。人们发现,用高质量设备采集的自然图像(自然场景)有着一定的统计特征(如服从一些类高斯分布),而图像的失真会使这些统计特征发生改变,因此利用图像的一些统计特征作为图像特征,可以完成图像的无参考评价。
BRISQUE来自于论文《No-Reference Image Quality Assessment in the Spatial Domain》,是一个经典的利用NSS进行NR-IQA的模型。观察到自然图像局部归一化亮度系数(MSCN),强烈趋向于单位正态高斯特性,因此作者假设失真会改变MSCN的分布状况,并基于此提取特征。
基于自然场景统计的工作还有很多,如BLIINDS-II、VIF、DIIVINE等,但是这些工作往往需要对图形进行分解(DCT、小波等)。BRISQUE的优美之处在于,它不需要对图像进行频域分解,仅仅使用简单的归一化过程,就使得数据呈现有规律的分布。模型简单且高效,可扩展性强,计算的复杂度较低。
后来经过实验发现,四个方向内积的AGGD特征是模型的主要特征,他们给模型的性能带来主要的贡献。这表明,图像的结构是影响人类对图像质量感知的主要因素。在质量评价中,绝大部分模型都会考虑到图像的结构信息,如经典的SSIM,或者LGP、GMSD、GM-LOG使用梯度信息模型,以及其他一些频域分解的模型。而BRISQUE使用四个方向的点积来表示图像的结构,这种想法十分巧妙。
1 原理简介
1.局部亮度归一化

如上图左列所示,像素与其周围的像素具有很高的相关性,因为图像函数通常是分段平滑的。我们在左列可以观察到一种对角结构。图像的归一化能够大大减少像素的相关性,如右列所示。
局部亮度归一化过程如下式:
I
^
(
i
,
j
)
=
I
(
i
,
j
)
−
μ
(
i
,
j
)
σ
(
i
,
j
)
+
C
\hat{I}(i, j)=\frac{I(i, j)-\mu(i, j)}{\sigma(i, j)+C}
I^(i,j)=σ(i,j)+CI(i,j)−μ(i,j)
其中:
μ
(
i
,
j
)
=
∑
k
=
−
K
K
∑
l
=
−
L
L
w
k
,
l
I
k
,
l
(
i
,
j
)
σ
(
i
,
j
)
=
∑
k
=
−
K
K
∑
l
=
−
L
L
w
k
,
l
(
I
k
,
l
(
i
,
j
)
−
μ
(
i
,
j
)
)
2
C
=
1
C=1
C=1,是为了防止分母为0。
可见这其实很类似数据预处理过程中的z-score归一化过程。
归一化之后的图像数据不再用
I
I
I表示,而是用
M
S
C
N
MSCN
MSCN(mean subtracted contrast normalized coefficients)表示。
局部亮度归一化的一种生物学解释是,人来在感知失真时,会存在一种“对比掩蔽效应”。这种效应通俗的解释就是,在图像纹理很丰富的地方,图像的失真往往很难被感受到,复杂的纹理掩盖了失真。这种归一化的过程,在其他的论文里面也称为Divisive Normalization。
2.利用广义高斯分布拟合 M S C N MSCN MSCN获得特征
自然图像(未失真)的 M S C N MSCN MSCN具有一定的统计特征(如类高斯分布),而失真改变这一分布。下图可以观察到不同失真类型图像和自然图像具有不同分布特征,文献使用广义高斯分布(GGD)对图像 M S C N MSCN MSCN的分布进行拟合。

零均值广义高斯分布(GGD)的定义如下:
f
(
x
;
α
,
σ
2
)
=
α
2
β
Γ
(
1
/
α
)
exp
(
−
(
∣
x
∣
β
)
α
)
f\left(x ; \alpha, \sigma^{2}\right)=\frac{\alpha}{2 \beta \Gamma(1 / \alpha)} \exp \left(-\left(\frac{|x|}{\beta}\right)^{\alpha}\right)
f(x;α,σ2)=2βΓ(1/α)αexp(−(β∣x∣)α)
where
β
=
σ
Γ
(
1
/
α
)
Γ
(
3
/
α
)
\beta=\sigma \sqrt{\frac{\Gamma(1 / \alpha)}{\Gamma(3 / \alpha)}}
β=σΓ(3/α)Γ(1/α)
and
Γ
(
⋅
)
\Gamma(\cdot)
Γ(⋅) is the gamma function:
Γ
(
a
)
=
∫
0
∞
t
a
−
1
e
−
t
d
t
a
>
0
\Gamma(a)=\int_{0}^{\infty} t^{a-1} e^{-t} d t \quad a>0
Γ(a)=∫0∞ta−1e−tdta>0
利用GGD拟合分布获得的形状参数
(
α
,
σ
2
)
(α, σ^2)
(α,σ2)作为特征f1和特征f2。关于广义高斯分布的参数拟合方法实现问题,我在另一篇博客单独描述,这里主要介绍IQA模型原理,不再叙述。
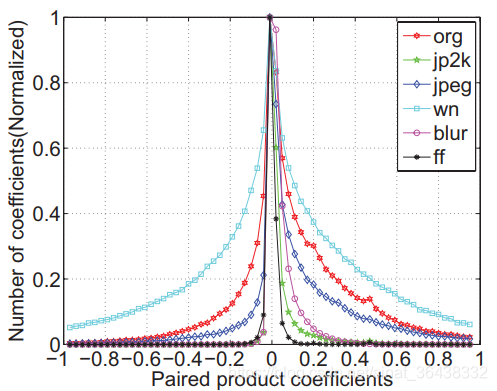
3.利用非对称广义高斯分布拟合MSCN相邻系数内积
如前面所说,图像的结构信息具有很大的价值,因此论文也研究了相邻MSCN系数之间的统计特征来自作为图像的结构信息。论文在四个不同方向计算相邻系数内积,并利用非对称广义高斯分布(AGGD)拟合分布特征。四个方向的内积定义如下:
H
(
i
,
j
)
=
I
^
(
i
,
j
)
∗
I
^
(
i
,
j
+
1
)
V
(
i
,
j
)
=
I
^
(
i
,
j
)
∗
I
^
(
i
+
1
,
j
)
D
1
(
i
,
j
)
=
I
^
(
i
,
j
)
∗
I
^
(
i
+
1
,
j
+
1
)
D
2
(
i
,
j
)
=
I
^
(
i
,
j
)
∗
I
^
(
i
+
1
,
j
−
1
)
下图展示了其中一个方向上内积数据的分布情况,可以发现失真的引入会使得分布带来显著改变。这个分布,论文使用非对称广义高斯分布AGGD拟合。
零均值非对称广义高斯分布(AGGD)的定义如下:
f
(
x
;
v
,
σ
l
2
,
σ
r
2
)
=
{
v
(
β
1
+
β
r
)
Γ
(
1
v
)
exp
(
−
(
−
x
β
l
)
v
)
x
<
0
v
(
β
l
+
β
r
)
Γ
(
1
v
)
exp
(
−
(
x
β
r
)
v
)
x
≥
0
f\left(x ; v, \sigma_{l}^{2}, \sigma_{r}^{2}\right)=\left\{
where
β
l
=
σ
l
Γ
(
1
v
)
Γ
(
3
v
)
β
r
=
σ
r
Γ
(
1
v
)
Γ
(
3
v
)
η
=
(
β
r
−
β
l
)
Γ
(
2
v
)
Γ
(
1
v
)
\eta=\left(\beta_{r}-\beta_{l}\right) \frac{\Gamma\left(\frac{2}{v}\right)}{\Gamma\left(\frac{1}{v}\right)}
η=(βr−βl)Γ(v1)Γ(v2)
利用AGGD拟合获得的形状参数 ( η , ν , σ l 2 , σ r 2 ) (η, ν, σ_l^2 , σ_r^2 ) (η,ν,σl2,σr2)将作为特征f3-f18(4个方向 x 4个特征)。关于非对称广义高斯分布的参数拟合方法实现问题,我亦在另一篇博客单独描述,这里主要介绍IQA模型原理,不再叙述。
至此,对图像的18个特征提取就完成了,具体的特征内容如下表。

需要指出的是,多尺度的特征经常在IQA模型中使用。论文采用了多尺度特征的形式,具体操作为首先对原始图像采集f1-f18这18维特征,然后对图像进行一次下采样,在下采样的图像上再提取一次这18维的特征,这样一共获得36维特征。
2 代码实现
- 文献的作者是给出MATLAB代码的,地址如下:
http://live.ece.utexas.edu/research/quality/BRISQUE_release.zip
一般用迅雷就能下下来。我也存到网盘上了,下不了的可以用网盘:
链接:https://pan.baidu.com/s/1RxlaOAlGGMLWZV7X7sTqOQ
提取码:bab3 - 最近发现作者也更新了一个C++版本的代码:
http://live.ece.utexas.edu/research/Quality/brisque_revised.zip
网盘链接:https://pan.baidu.com/s/1Ei204UN3xBWMTWS0Zakkig
提取码:zt71 - 本文的python实现:https://github.com/guyueyao/torchBRISUQE
本文主要给出BRISQUE算法的特征提取部分:
import torch import torch.nn.functional as F import math from scipy.special import gamma import numpy as np from typing import Type, Any, Callable, Union, List, Optional def gaussian_2d_kernel(kernel_size, sigma): kernel = torch.zeros((kernel_size, kernel_size)) center = kernel_size // 2 if sigma == 0: sigma = ((kernel_size - 1) * 0.5 - 1) * 0.3 + 0.8 s = 2 * (sigma ** 2) sum_val = 0 for i in range(0, kernel_size): for j in range(0, kernel_size): x = i - center y = j - center kernel[i, j] = math.exp(-(x ** 2 + y ** 2) / s) sum_val += kernel[i, j] sum_val = 1 / sum_val return kernel * sum_val def estimate_GGD_parameters(vec): vec=vec.view(-1) gam =np.arange(0.2,10.0,0.001) r_gam = (gamma(1/gam)*gamma(3/gam))/((gamma(2/gam))**2)#根据候选的γ计算r(γ) sigma_sq=torch.mean((vec)**2).to('cpu').numpy() E=torch.mean(torch.abs(vec)).to('cpu').numpy() r=sigma_sq/(E**2)#根据sigma^2和E计算r(γ) diff=np.abs(r-r_gam) gamma_param=gam[np.argmin(diff, axis=0)] return gamma_param,sigma_sq def estimate_AGGD_parameters(vec): vec = vec.to('cpu').numpy() alpha =np.arange(0.2,10.0,0.001)#产生候选的α r_alpha=((gamma(2/alpha))**2)/(gamma(1/alpha)*gamma(3/alpha))#根据候选的γ计算r(α) sigma_l=np.sqrt(np.mean(vec[vec<0]**2)) sigma_r=np.sqrt(np.mean(vec[vec>0]**2)) gamma_=sigma_l/sigma_r u2=np.mean(vec**2) m1=np.mean(np.abs(vec)) r_=m1**2/u2 R_=r_*(gamma_**3+1)*(gamma_+1)/((gamma_**2+1)**2) diff=(R_-r_alpha)**2 alpha_param=alpha[np.argmin(diff, axis=0)] const1 = np.sqrt(gamma(1 / alpha_param) / gamma(3 / alpha_param)) const2 = gamma(2 / alpha_param) / gamma(1 / alpha_param) eta =(sigma_r-sigma_l)*const1*const2 return alpha_param,eta,sigma_l**2,sigma_r**2 def brisque_feature(imdist:Type[Union[torch.Tensor,np.ndarray]],device='cuda'): #算法需要输入为灰度图像,像素值0-255 if type(imdist)==np.ndarray: assert imdist.ndim==2 or imdist.ndim==3 if imdist.ndim==2: imdist=torch.from_numpy(imdist).unsqueeze(0).unsqueeze(0) else: imdist = torch.from_numpy(imdist).unsqueeze(0) # input (Batch,1,H,W) assert imdist.dim()==4 assert imdist.shape[1]==1 or imdist.shape[1]==3 if torch.max(imdist)<=1: imdist = imdist * 255 # RGB to Gray if imdist.shape[1]==3: imdist=imdist[:,0,:]*0.299+imdist[:,1,:]*0.587+imdist[:,2,:]*0.114 # GPU is much much faster if 'cuda' in device: imdist=imdist.half().to(device) elif device=='cpu': imdist=imdist.float().to(device) else: raise ValueError('cpu or cuda',device) # 算法主体 scalenum = 2 window=gaussian_2d_kernel(7,7/6).unsqueeze(0).unsqueeze(0).float().to(device) if 'cuda' in device: window=window.half() feat=np.zeros((18*scalenum,)) for i in range(scalenum): mu=F.conv2d(imdist,window,stride=1,padding=3) mu_sq=mu*mu sigma=torch.sqrt(torch.abs(F.conv2d(imdist*imdist,window,stride=1,padding=3)-mu_sq)) structdis = (imdist - mu) / (sigma + 1) del mu, mu_sq,sigma feat[i*18],feat[i*18+1] = estimate_GGD_parameters(structdis) shifts = [(0,1),(1,0),(1,1),(-1,1)] for itr_shift in range(4): shifted_structdis=structdis.roll(shifts[itr_shift],(2,3)) pair=structdis*shifted_structdis pair=pair.view(-1) feat[i*18+2+itr_shift*4],feat[i*18+3+itr_shift*4],feat[i*18+4+itr_shift*4],feat[i*18+5+itr_shift*4]=estimate_AGGD_parameters(pair) imdist=F.interpolate(imdist,scale_factor=(0.5,0.5),mode='bilinear') return feat

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
算法主要是利用Pytorch实现,在GPU上跑的话相对较快。上述代码仅为特征提取部分,模型训练时需要提取训练集图像特征,之后利用特征和对应的质量分数训练SVR;测试时需要先提取测试图像特征,之后应用SVR回归。下面的不完整代码简单描述了这个过程:
from sklearn.svm import SVR from brisque_feature import brisque_feature import numpy as np import skimage.io # 训练 X=[] Y=[] for img_name,img_dmos in train_set: img=skimage.io.imread(os.path.join(root_path,img_name),as_gray=True)#读图像 feat=brisque_feature(img)#提特征 X.append(feat) Y.append(img_dmos) X=np.array(X) Y=np.array(Y) svr = SVR(kernel='rbf', C=C, gamma=Gamma)#训练SVR svr.fit(X,Y) # 测试 img=skimage.io.imread(os.path.join(test_img_path),as_gray=True) feat=brisque_feature(img) predicted_score=svr.predict(feat)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
默认使用GPU进行计算,如果没有GPU可以选择使用CPU:
feat=brisque_feature(img,'cpu')
- 1


