
- 1黑马程序员RabbitMQ入门到实战教程【基础篇】学习笔记
- 2硬卷消息中间件系列(四):RabbitMQ 管理界面详解
- 3clickhouse(十二、踩坑之路)_attempt to read after eof: cannot parse int32 from
- 4校园安全升级:AR实景监测场景方案
- 5php程序员述职材料_php程序员述职报告(多篇范文)
- 6基于Java+Springmvc+vue+element实现大学生科技创新创业项目管理系统_基于java的大学生创新创业管理系统的设计
- 7LearnOpenGL - 纹理_opengl 字节对齐
- 8yolov5旋转目标检测-遥感图像检测-无人机旋转目标检测(附代码和原理)
- 9Flutter系列文章-Flutter UI进阶_flutter 管理端 ui 库
- 10关于uni-app 在app中隐藏原生tabbar uni.hideTabBar()无效问题_uni 隐藏tabbar 闪
UR3机器人运动学分析之逆运动学分析_ur3运动学
赞
踩
前往我的博客阅读体验更佳:本文链接
2 逆运动学分析
逆运动学就是已知末端执行器相对于基坐标系的位置和姿态,求对应的六个关节角度。设末端执行器相对于基坐标系的位姿矩阵为:
T
6
0
=
[
n
x
o
x
a
x
p
x
n
y
o
y
a
y
p
y
n
z
o
z
a
z
p
z
0
0
0
1
]
(1)
T^0_6 =
2.1 逆运动学求解
2.1.1 关节1的求解
已知
T
6
0
=
[
n
x
o
x
a
x
p
x
n
y
o
y
a
y
p
y
n
z
o
z
a
z
p
z
0
0
0
1
]
=
T
1
0
⋅
T
2
1
⋅
T
3
2
⋅
T
4
3
⋅
T
5
4
⋅
T
6
5
(2)
T^0_6 =
将式(2)两边分别左乘
(
T
1
0
)
−
1
(T^0_1)^{-1}
(T10)−1和右乘
(
T
6
5
)
−
1
(T^5_6)^{-1}
(T65)−1,有:
(
T
1
0
)
−
1
∗
T
6
0
∗
(
T
6
5
)
−
1
=
T
2
1
⋅
T
3
2
⋅
T
4
3
⋅
T
5
4
(3)
(T^0_1)^{-1}*T^0_6*(T^5_6)^{-1}=T^1_2·T^2_3·T^3_4·T^4_5\tag{3}
(T10)−1∗T60∗(T65)−1=T21⋅T32⋅T43⋅T54(3)
因为:
(
T
1
0
)
−
1
=
[
c
1
s
1
0
0
−
s
1
c
1
0
0
0
0
1
−
d
1
0
0
0
1
]
(4)
(T^0_1)^{-1} =
(
T
6
5
)
−
1
=
[
c
6
0
−
s
6
0
−
s
6
0
−
c
6
0
0
1
0
−
d
6
0
0
0
1
]
(5)
(T^5_6)^{-1} =
所以有:
(
T
1
0
)
−
1
∗
T
6
0
∗
(
T
6
5
)
−
1
=
[
q
11
q
12
q
13
q
14
q
21
q
22
q
23
q
24
q
31
q
32
q
33
q
34
0
0
0
1
]
(6)
(T^0_1)^{-1}*T^0_6*(T^5_6)^{-1}=
式(6)中,各简式分别为:
{
q
11
=
c
6
(
c
1
n
x
+
s
1
n
y
)
−
s
6
(
c
1
o
x
+
s
1
o
y
)
q
12
=
c
1
a
x
+
s
1
a
y
q
13
=
−
c
6
(
c
1
o
x
+
s
1
o
y
)
−
s
6
(
c
1
n
x
+
s
1
n
y
)
q
14
=
c
1
p
x
+
s
1
p
y
−
(
c
1
a
x
+
s
1
a
y
)
d
6
q
21
=
c
6
(
c
1
n
y
−
s
1
n
x
)
−
s
6
(
c
1
o
y
−
s
1
o
x
)
q
22
=
c
1
a
y
−
s
1
a
x
q
23
=
c
6
(
s
1
o
x
−
c
1
o
y
)
−
s
6
(
c
1
n
y
−
s
1
n
x
)
q
24
=
c
1
p
y
−
s
1
p
x
+
d
6
(
s
1
a
x
−
c
1
a
y
)
q
31
=
c
6
n
z
−
s
6
o
z
q
32
=
a
z
q
33
=
−
s
6
n
z
−
c
6
o
z
q
34
=
p
z
−
d
1
−
a
z
d
6
(7)
\left\{
而式(3)右边结果为:
T
2
1
⋅
T
3
2
⋅
T
4
3
⋅
T
5
4
=
[
c
234
c
5
−
c
234
s
5
s
234
c
23
a
3
+
c
2
a
2
+
s
234
d
5
−
s
5
−
c
5
0
−
d
2
−
d
4
s
234
c
5
−
s
234
s
5
−
c
234
s
23
a
3
+
s
2
a
2
−
c
234
d
5
0
0
0
1
]
(8)
T^1_2·T^2_3·T^3_4·T^4_5=
由式(6)和式(8)第二行第四列元素相等,可以得到:
−
d
2
−
d
4
=
c
1
p
y
−
s
1
p
x
+
d
6
(
s
1
a
x
−
c
1
a
y
)
=
(
p
y
−
a
y
d
6
)
c
1
−
(
p
x
−
a
x
d
6
)
s
1
(9)
令
m
=
p
y
−
a
y
d
6
,
n
=
p
x
−
a
x
d
6
m=p_y-a_yd_6,n=p_x-a_xd_6
m=py−ayd6,n=px−axd6,则式(9)可化为:
m
c
1
−
n
s
1
=
−
d
2
−
d
4
(10)
mc_1-ns_1=-d_2-d_4\tag{10}
mc1−ns1=−d2−d4(10)
利用辅助角公式可将上式化为:
m
2
+
n
2
sin
(
φ
−
θ
1
)
=
−
d
2
−
d
4
(11)
\sqrt{m^2+n^2}\sin(\varphi-\theta_1)=-d_2-d_4\tag{11}
m2+n2
sin(φ−θ1)=−d2−d4(11)
即:
sin
(
φ
−
θ
1
)
=
−
d
2
−
d
4
m
2
+
n
2
(12)
\sin(\varphi-\theta_1)=\frac{-d_2-d_4}{\sqrt{m^2+n^2}}\tag{12}
sin(φ−θ1)=m2+n2
−d2−d4(12)
其中,
sin
(
φ
)
=
m
m
2
+
n
2
\sin(\varphi)=\frac{m}{\sqrt{m^2+n^2}}
sin(φ)=m2+n2
m,
cos
(
φ
)
=
n
m
2
+
n
2
\cos(\varphi)=\frac{n}{\sqrt{m^2+n^2}}
cos(φ)=m2+n2
n,则:
φ
=
A
t
a
n
2
(
m
,
n
)
(13)
\varphi=\mathrm{Atan2}(m,n)\tag{13}
φ=Atan2(m,n)(13)
由式(12)可得:
cos
(
φ
−
θ
1
)
=
±
1
−
(
−
d
2
−
d
4
m
2
+
n
2
)
2
(14)
\cos(\varphi-\theta_1)=\pm\sqrt{1-(\frac{-d_2-d_4}{\sqrt{m^2+n^2}})^2}\tag{14}
cos(φ−θ1)=±1−(m2+n2
−d2−d4)2
(14)
由式(12)和式(14)可得:
φ
−
θ
1
=
A
t
a
n
2
(
−
d
2
−
d
4
,
±
m
2
+
n
2
−
(
d
2
+
d
4
)
2
)
(15)
\varphi-\theta_1=\mathrm{Atan2}(-d_2-d_4,\pm\sqrt{m^2+n^2-(d_2+d_4)^2})\tag{15}
φ−θ1=Atan2(−d2−d4,±m2+n2−(d2+d4)2
)(15)
即:
θ
1
=
φ
−
A
t
a
n
2
(
−
d
2
−
d
4
,
±
m
2
+
n
2
−
(
d
2
+
d
4
)
2
)
(16)
\theta_1=\varphi-\mathrm{Atan2}(-d_2-d_4,\pm\sqrt{m^2+n^2-(d_2+d_4)^2})\tag{16}
θ1=φ−Atan2(−d2−d4,±m2+n2−(d2+d4)2
)(16)
将式(13)代入上式可求得
θ
1
\theta_1
θ1:
θ
1
=
A
t
a
n
2
(
m
,
n
)
−
A
t
a
n
2
(
−
d
2
−
d
4
,
±
m
2
+
n
2
−
(
d
2
+
d
4
)
2
)
(17)
\theta_1=\mathrm{Atan2}(m,n)-\mathrm{Atan2}(-d_2-d_4,\pm\sqrt{m^2+n^2-(d_2+d_4)^2})\tag{17}
θ1=Atan2(m,n)−Atan2(−d2−d4,±m2+n2−(d2+d4)2
)(17)
共两个解。
2.1.2 关节5的求解
由式(6)和式(8)第二行第二列元素相等,可以得到:
−
c
5
=
c
1
a
y
−
s
1
a
x
(18)
-c_5=c_1a_y-s_1a_x\tag{18}
−c5=c1ay−s1ax(18)
由于
θ
1
\theta_1
θ1已知,则可求得
θ
5
\theta_5
θ5为:
θ
5
=
±
arccos
(
s
1
a
x
−
c
1
a
y
)
(19)
\theta_5=\pm \arccos(s_1a_x-c_1a_y)\tag{19}
θ5=±arccos(s1ax−c1ay)(19)
共两个解。
2.1.3 关节6的求解
由式(6)和式(8)第二行第一列元素相等,可以得到:
−
s
5
=
c
6
(
c
1
n
y
−
s
1
n
x
)
−
s
6
(
c
1
o
y
−
s
1
o
x
)
(20)
-s_5=c_6(c_1n_y-s_1n_x)-s_6(c_1o_y-s_1o_x)\tag{20}
−s5=c6(c1ny−s1nx)−s6(c1oy−s1ox)(20)
由式(6)和式(8)第二行第三列元素相等,可以得到:
0
=
c
6
(
s
1
o
x
−
c
1
o
y
)
−
s
6
(
c
1
n
y
−
s
1
n
x
)
(21)
0=c_6(s_1o_x-c_1o_y)-s_6(c_1n_y-s_1n_x)\tag{21}
0=c6(s1ox−c1oy)−s6(c1ny−s1nx)(21)
令
s
=
c
1
n
y
−
s
1
n
x
s=c_1n_y-s_1n_x
s=c1ny−s1nx,
t
=
c
1
o
y
−
s
1
o
x
t=c_1o_y-s_1o_x
t=c1oy−s1ox,式(20)和式(21)可写成:
s
c
6
−
t
s
6
=
−
s
5
(22)
sc_6-ts_6 =-s_5 \tag{22}
sc6−ts6=−s5(22)
s
s
6
+
t
c
6
=
0
(23)
ss_6+tc_6 =0\tag{23}
ss6+tc6=0(23)
当
s
5
≠
0
s_5\neq 0
s5=0时,将式(22)和式(23)两边平方后相加,可得:
s
2
+
t
2
=
s
5
2
(24)
s^2+t^2=s_5^2\tag{24}
s2+t2=s52(24)
由于式(22)和式(10)形式类似,因此,可得到
θ
6
\theta_6
θ6:
θ
6
=
A
t
a
n
2
(
s
,
t
)
−
A
t
a
n
2
(
−
s
5
,
±
s
2
+
t
2
−
s
5
2
)
=
A
t
a
n
2
(
s
,
t
)
−
A
t
a
n
2
(
−
s
5
,
0
)
(25)
共一个解。
若 s 5 = 0 s_5=0 s5=0,此时机器人处于奇异位置。
2.1.4 关节3的求解
对式(3)两边同时右乘
(
T
5
4
)
−
1
(T^4_5)^{-1}
(T54)−1可得:
(
T
1
0
)
−
1
∗
T
6
0
∗
(
T
6
5
)
−
1
⋅
(
T
5
4
)
−
1
=
T
2
1
⋅
T
3
2
⋅
T
4
3
(26)
(T^0_1)^{-1}*T^0_6*(T^5_6)^{-1}·(T^4_5)^{-1}=T^1_2·T^2_3·T^3_4\tag{26}
(T10)−1∗T60∗(T65)−1⋅(T54)−1=T21⋅T32⋅T43(26)
因为
(
T
5
4
)
−
1
(T^4_5)^{-1}
(T54)−1为:
(
T
5
4
)
−
1
=
[
c
5
0
s
5
0
−
s
5
0
c
5
0
0
−
1
0
−
d
5
0
0
0
1
]
(27)
(T^4_5)^{-1} =
所以式(26)左边为:
(
T
1
0
)
−
1
∗
T
6
0
∗
(
T
6
5
)
−
1
∗
(
T
5
4
)
−
1
=
[
r
11
r
12
r
13
r
14
r
21
r
22
r
23
r
24
r
31
r
32
r
33
r
34
0
0
0
1
]
(28)
(T^0_1)^{-1}*T^0_6*(T^5_6)^{-1}*(T^4_5)^{-1}=
式(28)中部分简式如下:
{
r
14
=
c
1
p
x
+
s
1
p
y
−
d
6
(
s
1
a
y
+
c
1
a
x
)
+
d
5
[
c
6
(
c
1
o
x
+
s
1
o
y
)
+
s
6
(
c
1
n
x
+
s
1
n
y
)
]
r
34
=
p
z
−
d
1
−
a
z
d
6
+
d
5
(
s
6
n
z
+
c
6
o
z
)
(29)
\left\{
由于下述计算过程并未使用矩阵中其它元素,故此处未给出。
式(26)右边为:
T
2
1
⋅
T
3
2
⋅
T
4
3
=
[
c
234
−
s
234
0
c
23
a
3
+
c
2
a
2
0
0
−
1
−
d
2
−
d
4
s
234
c
234
0
s
23
a
3
+
s
2
a
2
0
0
0
1
]
(30)
T^1_2·T^2_3·T^3_4=
由式(28)和式(30)第一行第四列元素和第三行第四列元素分别相等,得:
{
a
3
c
23
+
a
2
c
2
=
r
14
a
3
s
23
+
a
2
s
2
=
r
34
(31)
\left\{
两边平方后相加得到:
a
3
2
+
a
2
2
+
2
a
2
a
3
(
c
23
c
2
+
s
23
s
2
)
=
r
14
2
+
r
34
2
(32)
a_3^2+a_2^2+2a_2a_3(c_{23}c_2+s_{23}s_2)=r_{14}^2+r_{34}^2\tag{32}
a32+a22+2a2a3(c23c2+s23s2)=r142+r342(32)
注意到
c
23
c
2
+
s
23
s
2
=
cos
(
θ
2
+
θ
3
)
cos
(
θ
2
)
+
sin
(
θ
2
+
θ
3
)
sin
(
θ
2
)
=
cos
(
θ
2
+
θ
3
−
θ
2
)
=
cos
(
θ
3
)
c_{23}c_2+s_{23}s_2=\cos(\theta_2+\theta_3)\cos(\theta_2)+\sin(\theta_2+\theta_3)\sin(\theta_2)=\cos(\theta_2+\theta_3-\theta_2)=\cos(\theta_3)
c23c2+s23s2=cos(θ2+θ3)cos(θ2)+sin(θ2+θ3)sin(θ2)=cos(θ2+θ3−θ2)=cos(θ3).
所以
θ
3
\theta_3
θ3为:
θ
3
=
±
arccos
(
r
14
2
+
r
34
2
−
a
3
2
−
a
2
2
2
a
2
a
3
)
(33)
\theta_3=\pm \arccos(\frac{r_{14}^2+r_{34}^2-a_3^2-a_2^2}{2a_2a_3})\tag{33}
θ3=±arccos(2a2a3r142+r342−a32−a22)(33)
共两个解。
2.1.5 关节2的求解
利用三角函数公式,方程组式(31)可以化为:
{
(
a
3
c
3
+
a
2
)
s
2
+
a
3
s
3
c
2
=
r
14
−
a
3
s
3
s
2
+
(
a
3
c
3
+
a
2
)
c
2
=
r
34
(34)
\left\{
求解方程组式(34),结果如下:
{
s
2
=
(
a
3
c
3
+
a
2
)
r
34
−
a
3
s
3
r
14
a
3
2
+
a
2
2
+
2
a
2
a
3
c
3
c
2
=
a
3
s
3
r
34
+
(
a
3
c
3
+
a
2
)
r
14
a
3
2
+
a
2
2
+
2
a
2
a
3
c
3
(35)
\left\{
则
θ
2
\theta_2
θ2为:
θ
2
=
A
t
a
n
2
(
s
2
,
c
2
)
(36)
\theta_2=\mathrm{Atan2}(s_2,c_2)\tag{36}
θ2=Atan2(s2,c2)(36)
共一个解。
2.1.6 关节4的求解
由式(6)和式(8)第一行第三列元素和第三行第三列元素分别相等,可以得到:
{
s
234
=
−
s
6
(
c
1
n
x
+
s
1
n
y
)
−
c
6
(
c
1
o
x
+
s
1
o
y
)
c
234
=
s
6
n
z
+
c
6
o
z
(37)
\left\{
则
θ
4
\theta_4
θ4为:
θ
4
=
A
t
a
n
2
(
s
234
,
c
234
)
−
θ
2
−
θ
3
(38)
\theta_4=\mathrm{Atan2}(s_{234},c_{234})-\theta_2-\theta_3\tag{38}
θ4=Atan2(s234,c234)−θ2−θ3(38)
共一个解。
2.1.7 总结
综上所述,可以得到六个关节角的解析解表达式如下:
θ
1
=
A
t
a
n
2
(
m
,
n
)
−
A
t
a
n
2
(
−
d
2
−
d
4
,
±
m
2
+
n
2
−
(
d
2
+
d
4
)
2
)
(39)
\theta_1=\mathrm{Atan2}(m,n)-\mathrm{Atan2}(-d_2-d_4,\pm\sqrt{m^2+n^2-(d_2+d_4)^2})\tag{39}
θ1=Atan2(m,n)−Atan2(−d2−d4,±m2+n2−(d2+d4)2
)(39)
其中,
m
=
p
y
−
a
y
d
6
m=p_y-a_yd_6
m=py−ayd6,
n
=
p
x
−
a
x
d
6
n=p_x-a_xd_6
n=px−axd6。
θ
5
=
±
arccos
(
s
1
a
x
−
c
1
a
y
)
(40)
\theta_5=\pm \arccos(s_1a_x-c_1a_y)\tag{40}
θ5=±arccos(s1ax−c1ay)(40)
θ
6
=
A
t
a
n
2
(
s
,
t
)
−
A
t
a
n
2
(
−
s
5
,
0
)
(41)
\theta_6=\mathrm{Atan2}(s,t)-\mathrm{Atan2}(-s_5,0)\tag{41}
θ6=Atan2(s,t)−Atan2(−s5,0)(41)
其中,
s
=
c
1
n
y
−
s
1
n
x
s=c_1n_y-s_1n_x
s=c1ny−s1nx,
t
=
c
1
o
y
−
s
1
o
x
t=c_1o_y-s_1o_x
t=c1oy−s1ox。
θ
3
=
±
arccos
(
r
14
2
+
r
34
2
−
a
3
2
−
a
2
2
2
a
2
a
3
)
(42)
\theta_3=\pm \arccos(\frac{r_{14}^2+r_{34}^2-a_3^2-a_2^2}{2a_2a_3})\tag{42}
θ3=±arccos(2a2a3r142+r342−a32−a22)(42)
其中,
r
14
=
c
1
p
x
+
s
1
p
y
−
d
6
(
s
1
a
y
+
c
1
a
x
)
+
d
5
[
c
6
(
c
1
o
x
+
s
1
o
y
)
+
s
6
(
c
1
n
x
+
s
1
n
y
)
]
r_{14}=c_1p_x+s_1p_y-d_6(s_1a_y+c_1a_x)+d_5[c_6(c_1o_x+s_1o_y)+s_6(c_1n_x+s_1n_y)]
r14=c1px+s1py−d6(s1ay+c1ax)+d5[c6(c1ox+s1oy)+s6(c1nx+s1ny)],
r
34
=
p
z
−
d
1
−
a
z
d
6
+
d
5
(
s
6
n
z
+
c
6
o
z
)
r_{34}=p_z-d_1-a_zd_6+d_5(s_6n_z+c_6o_z)
r34=pz−d1−azd6+d5(s6nz+c6oz)。
θ
2
=
A
t
a
n
2
(
s
2
,
c
2
)
(43)
\theta_2=\mathrm{Atan2}(s_2,c_2)\tag{43}
θ2=Atan2(s2,c2)(43)
其中,
s
2
=
(
a
3
c
3
+
a
2
)
r
34
−
a
3
s
3
r
14
a
3
2
+
a
2
2
+
2
a
2
a
3
c
3
s_2 = \frac{(a_3c_3+a_2)r_{34}-a_3s_3r_{14}}{a_3^2+a_2^2+2a_2a_3c_3}
s2=a32+a22+2a2a3c3(a3c3+a2)r34−a3s3r14,
c
2
=
a
3
s
3
r
34
+
(
a
3
c
3
+
a
2
)
r
14
a
3
2
+
a
2
2
+
2
a
2
a
3
c
3
c_2 = \frac{a_3s_3r_{34}+(a_3c_3+a_2)r_{14}}{a_3^2+a_2^2+2a_2a_3c_3}
c2=a32+a22+2a2a3c3a3s3r34+(a3c3+a2)r14。
θ
4
=
A
t
a
n
2
(
s
234
,
c
234
)
−
θ
2
−
θ
3
(44)
\theta_4=\mathrm{Atan2}(s_{234},c_{234})-\theta_2-\theta_3\tag{44}
θ4=Atan2(s234,c234)−θ2−θ3(44)
其中, s 234 = − s 6 ( c 1 n x + s 1 n y ) − c 6 ( c 1 o x + s 1 o y ) s_{234}=-s_6(c_1n_x+s_1n_y)-c_6(c_1o_x+s_1o_y) s234=−s6(c1nx+s1ny)−c6(c1ox+s1oy), c 234 = − s 6 n z − c 6 o z c_{234}=-s_6n_z-c_6o_z c234=−s6nz−c6oz。
在上述求解公式中,由于 θ 1 \theta _1 θ1、 θ 5 \theta _5 θ5、 θ 3 \theta _3 θ3存在“ ± \pm ±”号的影响,所以该机器人对同一种末端位姿可能存在八组解。
2.2 程序编写
在2.1.7节中已经给出各个关节角的解析解表达式,利用表达式编写逆运动学求解程序,由于UR3机器人位姿表示方法采用旋转矢量形式,因此程序有齐次变换矩阵及旋转矢量两种输入方式,程序流程图如下图所示。
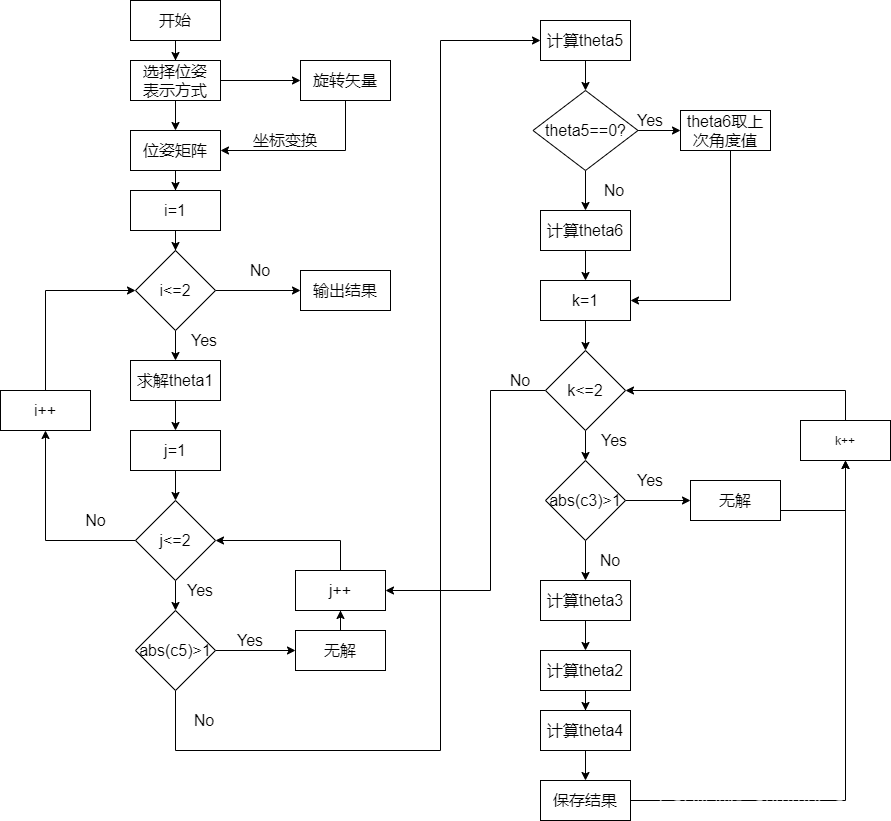
注意到求解
θ
5
\theta_5
θ5的表达式为:
θ
5
=
±
arccos
(
s
1
a
x
−
c
1
a
y
)
(45)
\theta_5=\pm \arccos(s_1a_x-c_1a_y)\tag{45}
θ5=±arccos(s1ax−c1ay)(45)
如果
∣
cos
θ
5
∣
=
∣
s
1
a
x
−
c
1
a
y
∣
>
1
(46)
|\cos\theta_{5}|=|s_1a_x-c_1a_y|>1\tag{46}
∣cosθ5∣=∣s1ax−c1ay∣>1(46)
但是余弦函数的值域为 [ − 1 , 1 ] [-1,1] [−1,1],所以式(46)无意义,这种情况下解不存在。同理,求解 θ 3 \theta_3 θ3时也存在同样的问题。也就是说,八组解析解并不一定全都存在。
同时,由于计算机内部存储数据类型的原因,当求解出的角度为零时实际存储的数值并不一定是零,由于误差的累计,后面角度的求解结果会产生较大的偏差,因此在每个角度求解完毕后需要添加如下程序块进行手动判零:
if abs(theta_5) < eps
theta_5 = 0;
end
- 1
- 2
- 3
2.3 验证
采用正逆运动学相互求解的方法验证解的正确与否。首先利用正运动学求得关节角为
Θ
=
[
1
5
∘
1
5
∘
1
5
∘
1
5
∘
1
5
∘
1
5
∘
]
T
\Theta=\left[15^{\circ}\ 15^{\circ}\ 15^{\circ}\ 15^{\circ}\ 15^{\circ}\ 15^{\circ}\right]^T
Θ=[15∘ 15∘ 15∘ 15∘ 15∘ 15∘]T时的位姿矩阵为:
T
6
0
=
[
0.5252
−
0.8478
0.0732
−
313.9360
−
0.1181
−
0.1578
−
0.9804
−
280.8134
0.8428
0.5062
−
0.1830
−
91.7142
0
0
0
1.0000
]
(47)
T^0_6=
利用上述位姿矩阵进行逆运动学求解,求得八组解如下所示:
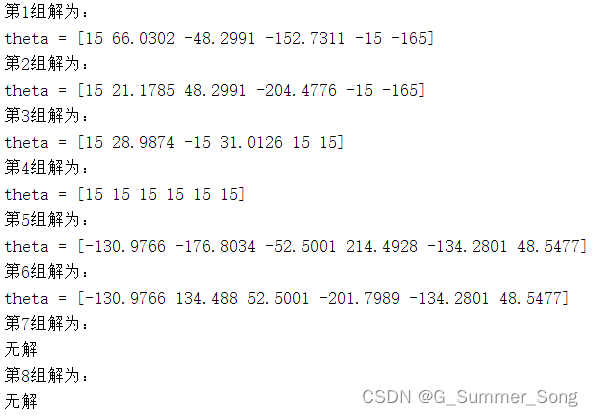
分别将每一组解利用正运动学计算位姿矩阵,发现得到的位姿矩阵同初始位姿矩阵相同,证明逆运动学解析解表达式无误。

