
热门标签
热门文章
- 1备战第15届蓝桥杯的同学注意了!蓝桥算法双周赛开始了!_第十五届蓝桥杯青少年
- 2git命令之fetch_your branch is up to date with 'origin/dev'.
- 3PyTorch小技巧:使用Hook可视化网络层激活(各层输出)
- 4【机器学习-周志华】学习笔记-第十二章
- 5大模型微调技术(Adapter-Tuning、Prefix-Tuning、Prompt-Tuning(P-Tuning)、P-Tuning v2、LoRA)_adapter tuning
- 6解决Expected all tensors to be on the same device, but found at least two devices, cuda:0
- 7全面解读:人工智能AI是什么_ai解读
- 8《算法设计与分析》复习
- 9【团队协作开发】从Gitee中克隆项目到IDEA并实现代码更新提交教程(新手)_怎么从gitee上拉取项目到idea
- 10计算机网络基础知识(五)——什么是TCPUDP协议?图文并茂的方式对两大传输层协议进行从头到尾的讲解_什么是tcp/udp协议栈
当前位置: article > 正文
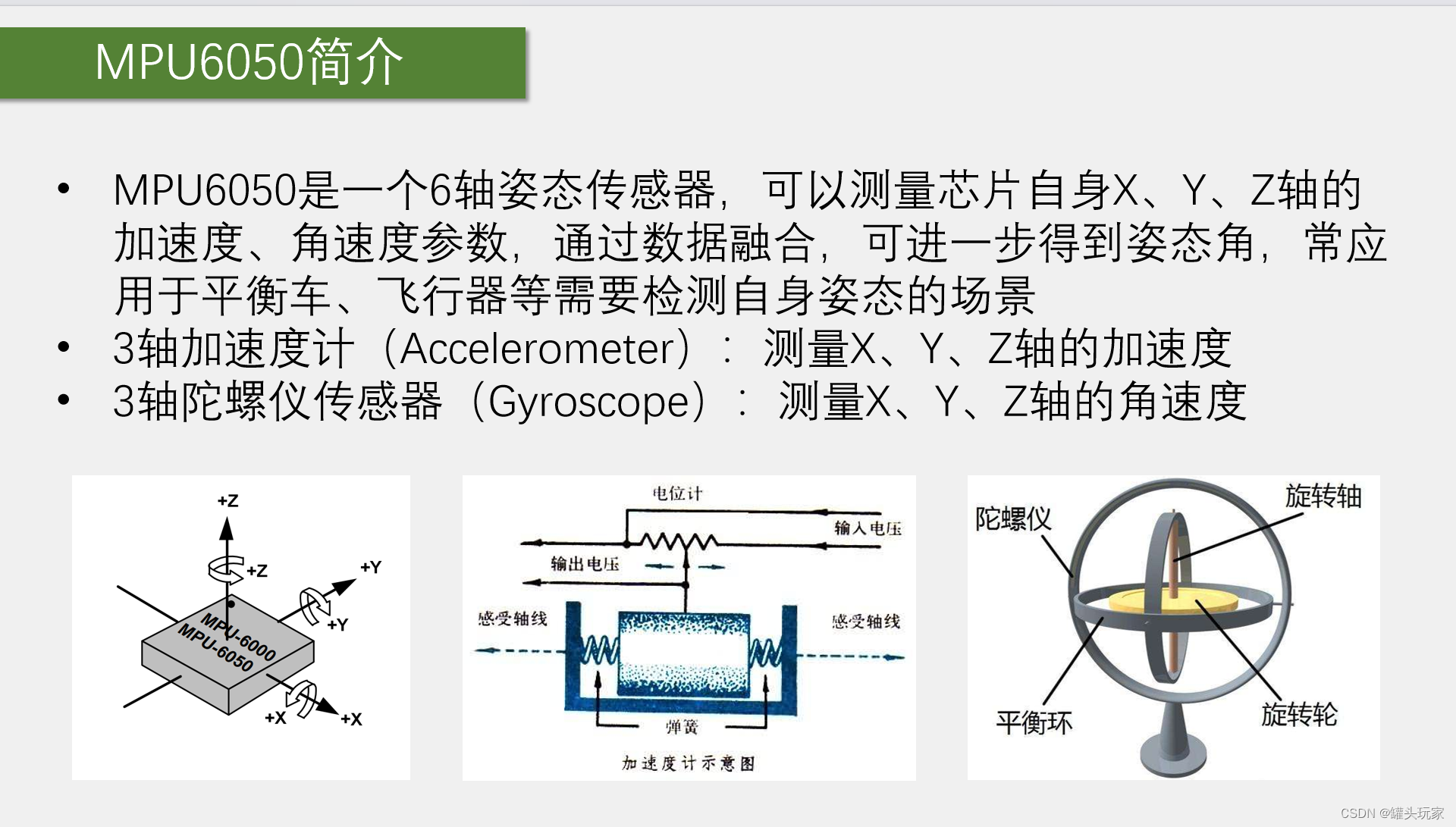
stm32---软件I2C读写MPU6050(了解MPU6050更多需要查阅手册)_datah = mpu6050_readreg(mpu6050_accel_xout_h); dat
作者:Cpp五条 | 2024-04-21 09:58:19
赞
踩
datah = mpu6050_readreg(mpu6050_accel_xout_h); datal = mpu6050_readreg(mpu6
图文概述:
代码:
MPU6050.c:
- #include "stm32f10x.h" // Device header
- #include "MyI2C.h"
- #include "MPU6050_Reg.h"
-
- #define MPU6050_ADDRESS 0xD0 //1101 000 0 (高7位是MPU6050的id号,最后1位表示读写状态---1为读,0为写)
-
- /**
- * @brief MPU6050_WriteReg---指定地址写数据
- * @param RegAddress---指定的地址
- * @param Data---写入的数据
- * @retval 无
- */
- void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
- {
- MyI2C_Start(); //开始时序
- MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址且低位最后一位为0表进行写操作
- while(MyI2C_ReceiveAck() != 0); //从机是否发送应答位(0为应答,1为非应答)
- MyI2C_SendByte(RegAddress); //发送指定写入的寄存器地址
- while(MyI2C_ReceiveAck() != 0); //...
- MyI2C_SendByte(Data); //发送写入指定寄存器的数据
- while(MyI2C_ReceiveAck() != 0); //...
- MyI2C_Stop(); //结束时序
- }
-
- /**
- * @brief MPU6050_ReadReg---指定地址读数据(需要先通过写数据指定地址然后重新开始时序读,就可以读到指定地址的内容)
- * @param RegAddress---指定的地址
- * @retval Data---读取指定地址中的内容
- */
- uint8_t MPU6050_ReadReg(uint8_t RegAddress)
- {
- uint8_t Data;
- MyI2C_Start(); //开始时序
- MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址且低位最后一位为0表进行写操作
- while(MyI2C_ReceiveAck() != 0); //从机是否发送应答位(0为应答,1为非应答)
- MyI2C_SendByte(RegAddress); //发送指定写入的寄存器地址
- while(MyI2C_ReceiveAck() != 0); //...
- MyI2C_Start(); //重新开始时序
- MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址且低位最后一位为1表进行读操作
- while(MyI2C_ReceiveAck() != 0); //...
- Data = MyI2C_ReceiveByte(); //读取指定地址的数据并赋值给Data变量
- MyI2C_SendAck(1); //主机发送应答位(0为应答,即继续读取;1为非应答,即收回总线的控制权)
- MyI2C_Stop(); //结束时序
- return Data; //返回读取的数据
- }
-
- /**
- * @brief MPU6050_Init---初始化MPU6050的配置(查看手册根据实际情况进行配置)
- * @param 无
- * @retval 无
- */
- void MPU6050_Init(void)
- {
- MyI2C_Init();
- //对MPU6050芯片的电源管理寄存器1进行配置---解除睡眠,选择陀螺仪时钟
- MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
- //对MPU6050芯片的电源管理寄存器2进行配置---6个轴均不待机
- MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
- //对MPU6050芯片的采样频率分频寄存器进行配置---采样分频为10
- MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
- //对MPU6050芯片的配置寄存器进行配置---滤波参数赋予最大值
- MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
- //对MPU6050芯片的陀螺仪寄存器进行配置---选择最大计算量程
- MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
- //对MPU6050芯片的加速度计寄存器进行配置---选择最大计算量程
- MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
- }
-
- /**
- * @brief MPU6050_GetID---获取MPU6050芯片的ID号
- * @param 无
- * @retval MPU6050_ReadReg(MPU6050_WHO_AM_I)---返回芯片的ID号
- */
- uint8_t MPU6050_GetID(void)
- {
- return MPU6050_ReadReg(MPU6050_WHO_AM_I);
- }
-
- /**
- * @brief MPU6050_GetData---获取MPU6050芯片的相关数据,包括3轴加速度计
- (Accelerometer):测量X、Y、Z轴的加速度以及3轴陀螺仪传感器
- (Gyroscope):测量X、Y、Z轴的角速度
- * @param *AccX---X轴的加速度
- * @param *AccY---Y轴的加速度
- * @param *AccZ---Z轴的加速度
- * @param *GyroX---X轴的角速度
- * @param *GyroY---Y轴的角速度
- * @param *GyroZ---Z轴的角速度
- * @retval 无
- */
- void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
- int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
- {
- uint8_t DataH, DataL;
- DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
- *AccX = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
- *AccY = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
- *AccZ = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
- *GyroX = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
- *GyroY = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
- *GyroZ = (DataH << 8) | DataL;
- }
-

MPU6050.h:
- #ifndef __MPU6050_H
- #define __MPU6050_H
-
- void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
- uint8_t MPU6050_ReadReg(uint8_t RegAddress);
-
- void MPU6050_Init(void);
- uint8_t MPU6050_GetID(void);
- void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
- int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
-
- #endif
MPU6050_Reg.h:
- #ifndef __MPU6050_REG_H
- #define __MPU6050_REG_H
-
- /*宏定义MPU6050常用的寄存器地址*/
- #define MPU6050_SMPLRT_DIV 0x19
- #define MPU6050_CONFIG 0x1A
- #define MPU6050_GYRO_CONFIG 0x1B
- #define MPU6050_ACCEL_CONFIG 0x1C
-
- #define MPU6050_ACCEL_XOUT_H 0x3B
- #define MPU6050_ACCEL_XOUT_L 0x3C
- #define MPU6050_ACCEL_YOUT_H 0x3D
- #define MPU6050_ACCEL_YOUT_L 0x3E
- #define MPU6050_ACCEL_ZOUT_H 0x3F
- #define MPU6050_ACCEL_ZOUT_L 0x40
- #define MPU6050_TEMP_OUT_H 0x41
- #define MPU6050_TEMP_OUT_L 0x42
- #define MPU6050_GYRO_XOUT_H 0x43
- #define MPU6050_GYRO_XOUT_L 0x44
- #define MPU6050_GYRO_YOUT_H 0x45
- #define MPU6050_GYRO_YOUT_L 0x46
- #define MPU6050_GYRO_ZOUT_H 0x47
- #define MPU6050_GYRO_ZOUT_L 0x48
-
- #define MPU6050_PWR_MGMT_1 0x6B
- #define MPU6050_PWR_MGMT_2 0x6C
- #define MPU6050_WHO_AM_I 0x75
-
-
- #endif
关键步骤:
1. 指定地址写数据:

- /**
- * @brief MPU6050_WriteReg---指定地址写数据
- * @param RegAddress---指定的地址
- * @param Data---写入的数据
- * @retval 无
- */
- void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
- {
- MyI2C_Start(); //开始时序
- MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址且低位最后一位为0表进行写操作
- while(MyI2C_ReceiveAck() != 0); //从机是否发送应答位(0为应答,1为非应答)
- MyI2C_SendByte(RegAddress); //发送指定写入的寄存器地址
- while(MyI2C_ReceiveAck() != 0); //...
- MyI2C_SendByte(Data); //发送写入指定寄存器的数据
- while(MyI2C_ReceiveAck() != 0); //...
- MyI2C_Stop(); //结束时序
- }
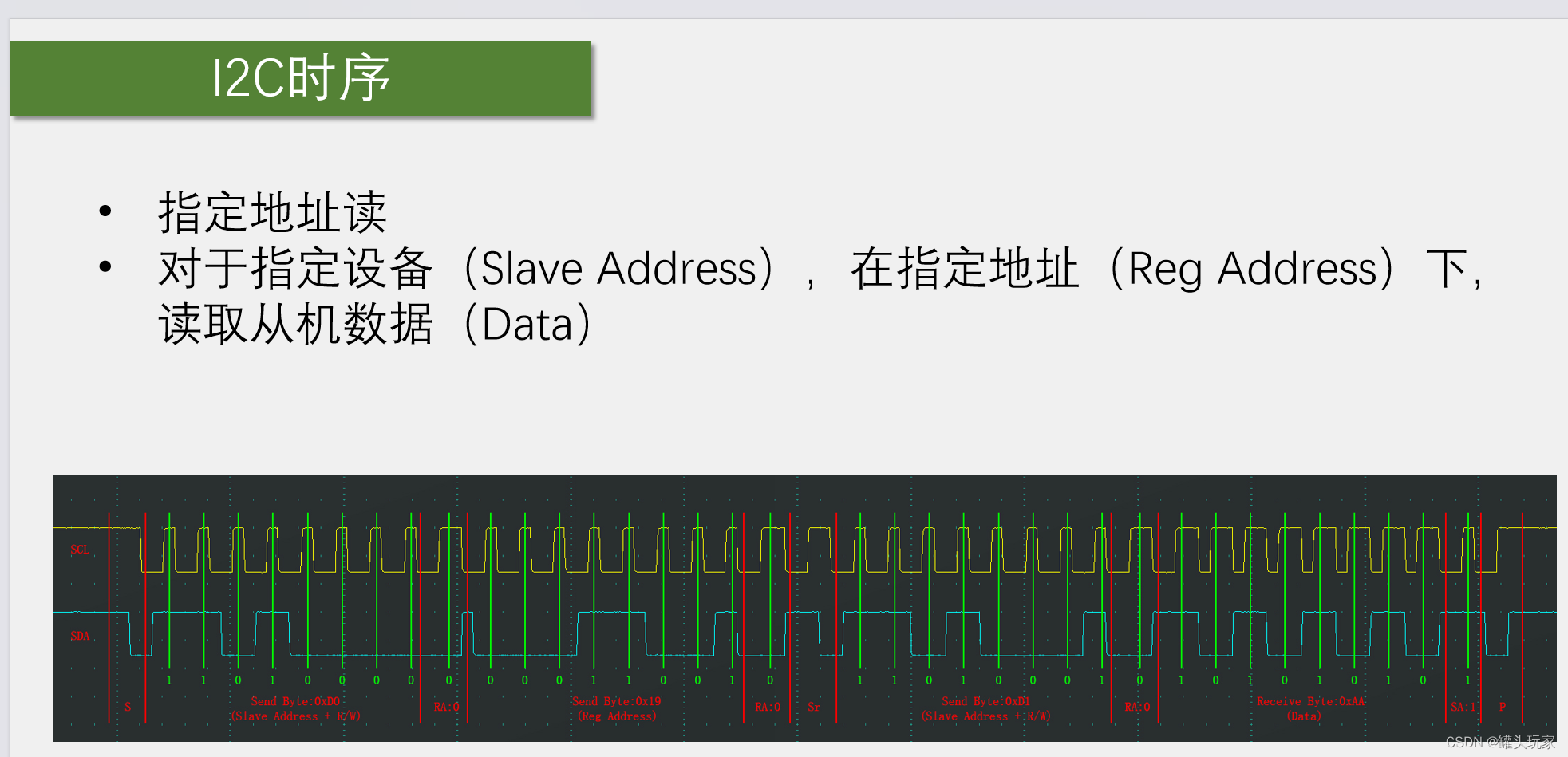
2. 指定地址读数据:
- /**
- * @brief MPU6050_ReadReg---指定地址读数据(需要先通过写数据指定地址然后重新开始时序读,就可以读到指定地址的内容)
- * @param RegAddress---指定的地址
- * @retval Data---读取指定地址中的内容
- */
- uint8_t MPU6050_ReadReg(uint8_t RegAddress)
- {
- uint8_t Data;
- MyI2C_Start(); //开始时序
- MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址且低位最后一位为0表进行写操作
- while(MyI2C_ReceiveAck() != 0); //从机是否发送应答位(0为应答,1为非应答)
- MyI2C_SendByte(RegAddress); //发送指定写入的寄存器地址
- while(MyI2C_ReceiveAck() != 0); //...
- MyI2C_Start(); //重新开始时序
- MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址且低位最后一位为1表进行读操作
- while(MyI2C_ReceiveAck() != 0); //...
- Data = MyI2C_ReceiveByte(); //读取指定地址的数据并赋值给Data变量
- MyI2C_SendAck(1); //主机发送应答位(0为应答,即继续读取;1为非应答,即收回总线的控制权)
- MyI2C_Stop(); //结束时序
- return Data; //返回读取的数据
- }
3. 获取MPU6050芯片的相关数据(3轴加速度计+3轴陀螺仪传感器):
- /**
- * @brief MPU6050_GetData---获取MPU6050芯片的相关数据,包括3轴加速度计
- (Accelerometer):测量X、Y、Z轴的加速度以及3轴陀螺仪传感器
- (Gyroscope):测量X、Y、Z轴的角速度
- * @param *AccX---X轴的加速度
- * @param *AccY---Y轴的加速度
- * @param *AccZ---Z轴的加速度
- * @param *GyroX---X轴的角速度
- * @param *GyroY---Y轴的角速度
- * @param *GyroZ---Z轴的角速度
- * @retval 无
- */
- void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
- int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
- {
- uint8_t DataH, DataL;
- DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
- *AccX = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
- *AccY = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
- *AccZ = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
- *GyroX = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
- *GyroY = (DataH << 8) | DataL;
-
- DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
- DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
- *GyroZ = (DataH << 8) | DataL;
- }
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Cpp五条/article/detail/462387
推荐阅读
相关标签

