
热门标签
热门文章
- 1Web组态可视化编辑器 快速绘制组态
- 2各个常见算法的时间复杂度_各个算法的时间复杂度
- 3wx原生小程序小功能_await wx.getstoragesync('openid');
- 4AcWing每日一题
- 5通义千问 - Code Qwen能力算法赛道季军方案
- 6如何用无人机倾斜摄影采集影像,完成实景三维重建?_13127 平方公里 倾斜摄影要多久
- 7分布式文件存储系统
- 8git pull/push不需要输入密码_服务器上git pull不输入密码
- 9基于python+django的协同过滤算法的电影推荐系统(源码+文档)_基于协同过滤算法的电影推荐系统
- 10视觉异常检测库Anomalib_liboai 物体检测
当前位置: article > 正文
STM32F103ZET6 编写 MPU6050代码 (HAL库、DMP代码)_zet6+mpu6050+lcd
作者:小小林熬夜学编程 | 2024-04-20 02:28:28
赞
踩
zet6+mpu6050+lcd
STM32 HAL库移植 mpu6050 DMP库
一、生成 stm32 代码
需要的东西:
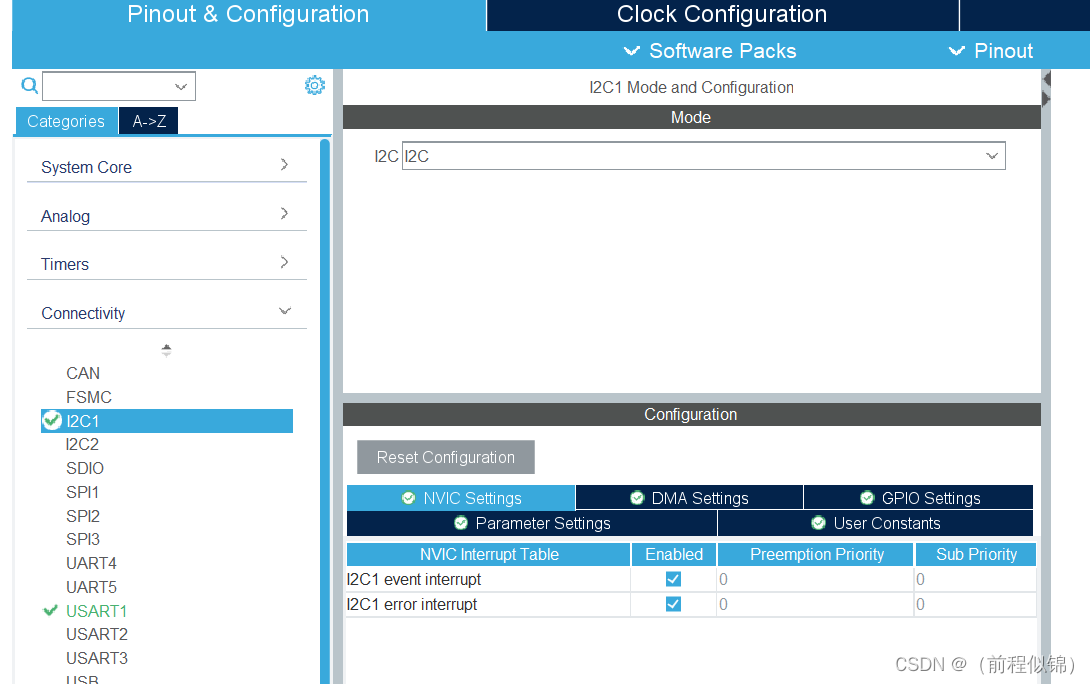
- I2C
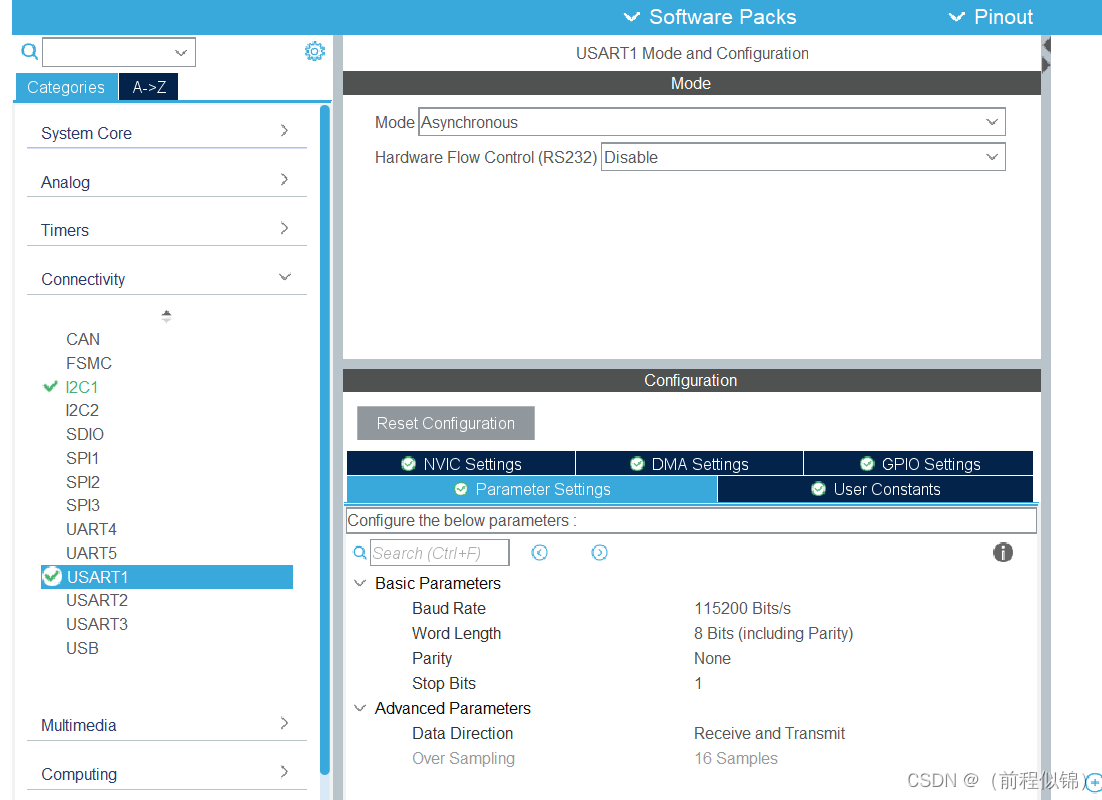
- 串口
1、时钟设置
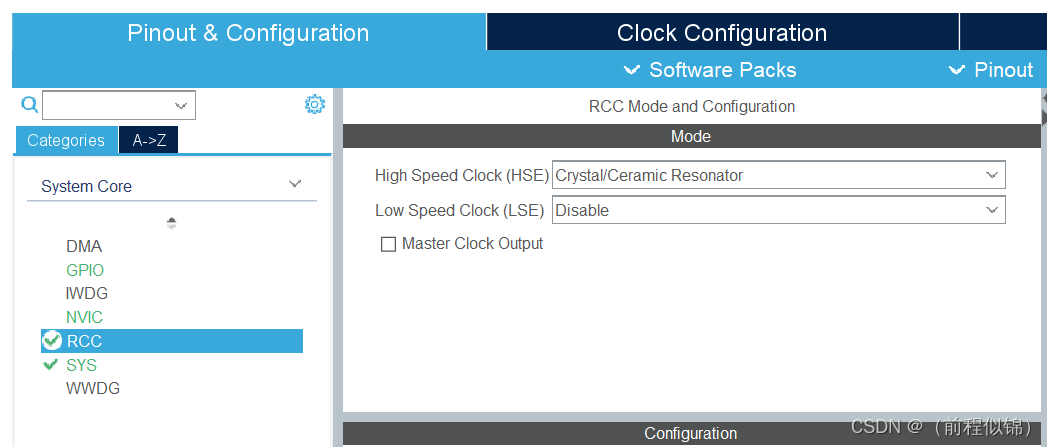
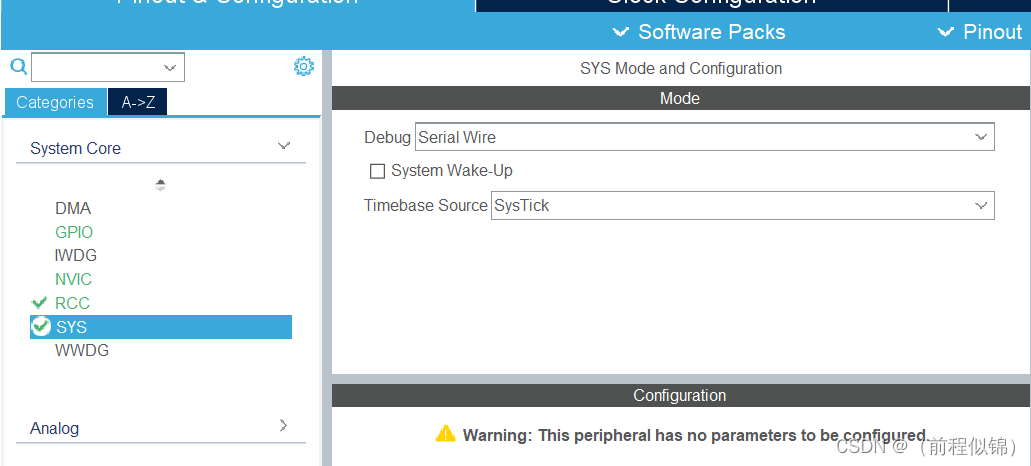
2、调试设置
3、I2C 设置
4、串口设置
5、生成代码
不截图了占空间
二、文件放置和配置
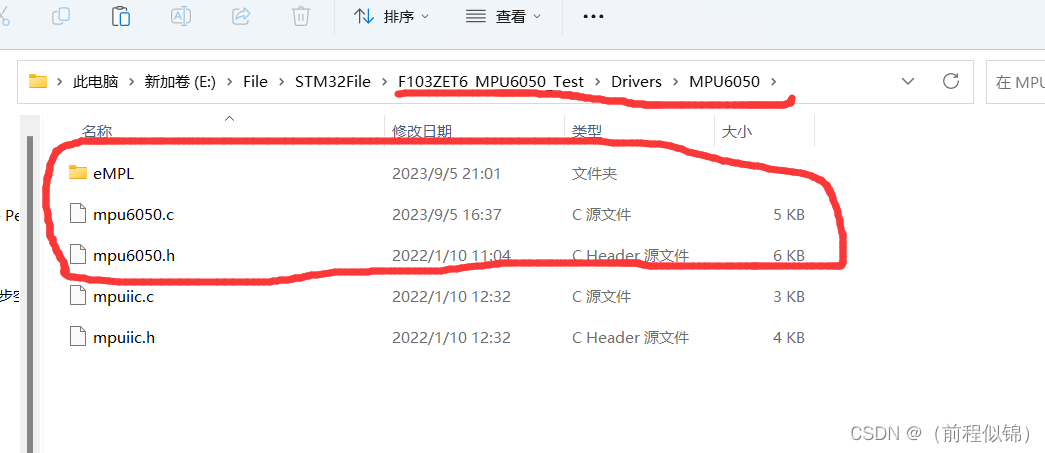
1、文件放置 (文件放在 Drivers 下面 )
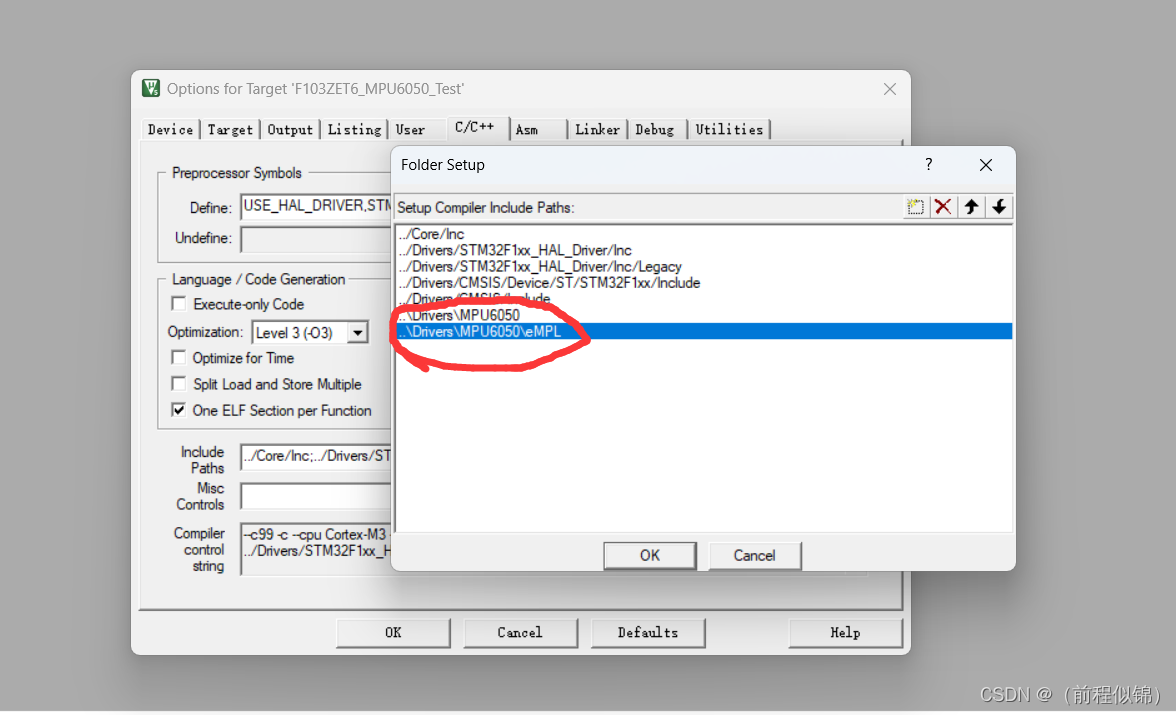
2、头文件导入
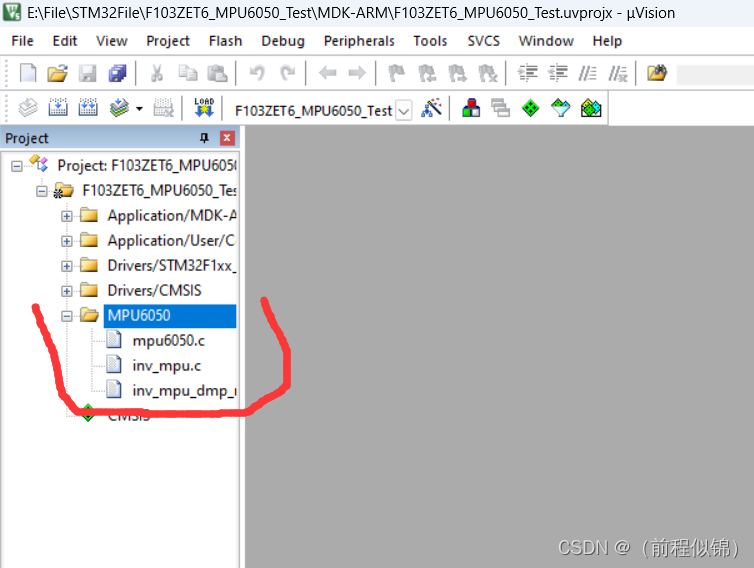
3、添加文件组
3、设置 printf 输出函数
这里懒得粘贴图片了,设置 printf 如果不会就参考以下链接:
STM32 HAL库使用 printf 输出
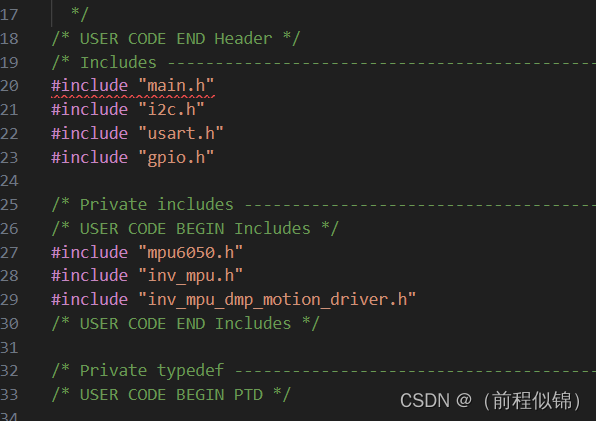
4、导入头文件
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
- 1
- 2
- 3
代码位置:
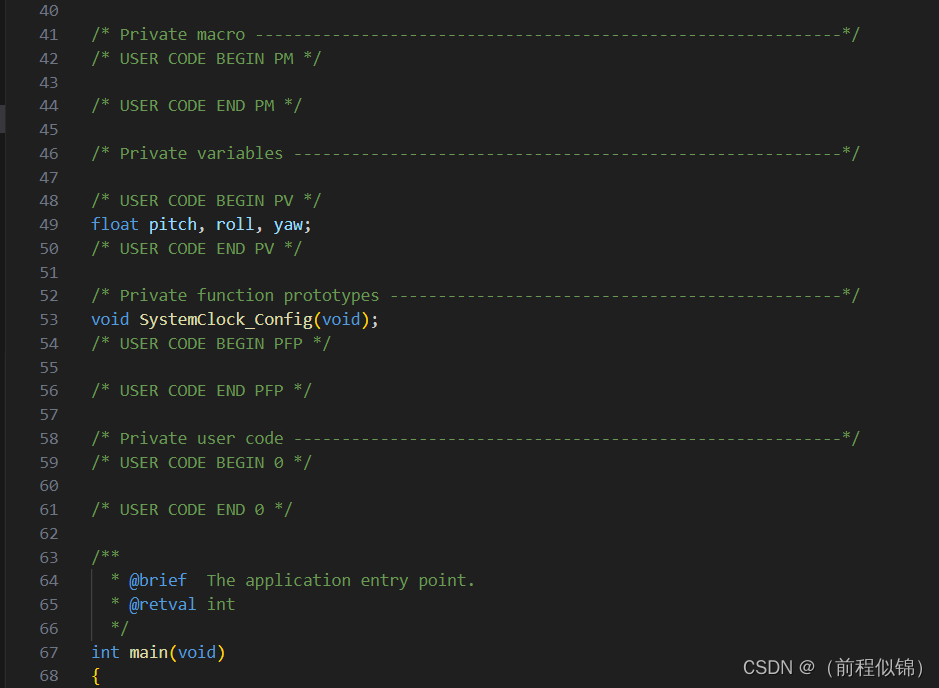
5、定义接收变量
float pitch, roll, yaw;
- 1
代码位置:
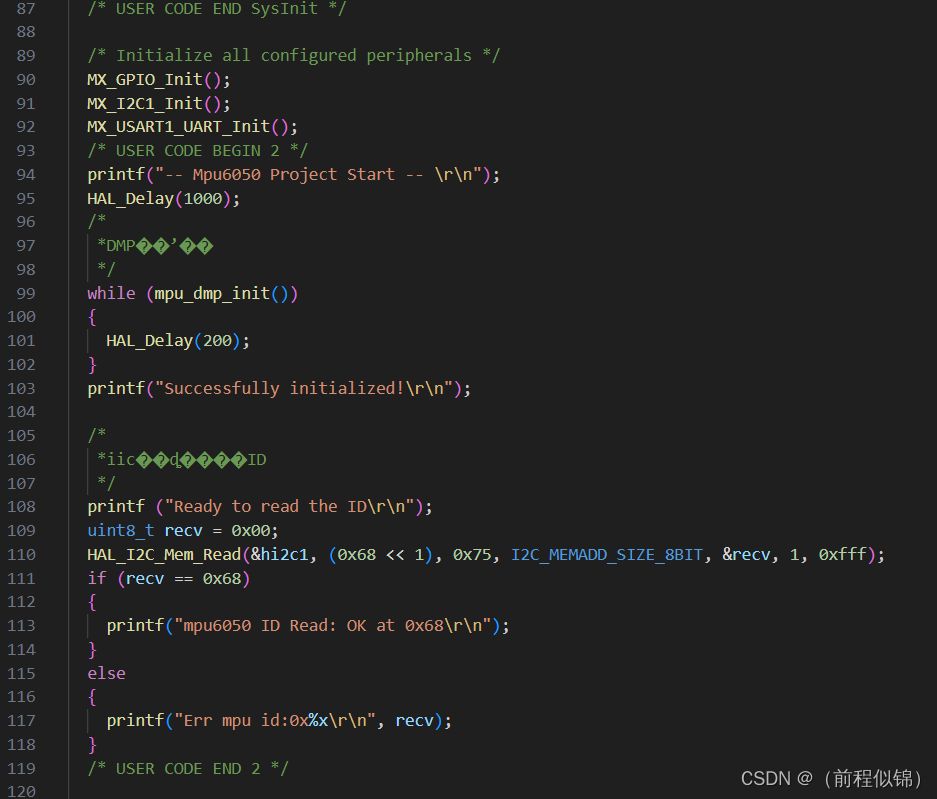
6、读取状态
/* USER CODE BEGIN 2 */ printf("-- Mpu6050 Project Start -- \r\n"); HAL_Delay(1000); /* *DMP��ʼ�� */ while (mpu_dmp_init()) { HAL_Delay(200); } printf("Successfully initialized!\r\n"); /* *iic��ȡ����ID */ printf ("Ready to read the ID\r\n"); uint8_t recv = 0x00; HAL_I2C_Mem_Read(&hi2c1, (0x68 << 1), 0x75, I2C_MEMADD_SIZE_8BIT, &recv, 1, 0xfff); if (recv == 0x68) { printf("mpu6050 ID Read: OK at 0x68\r\n"); } else { printf("Err mpu id:0x%x\r\n", recv); } /* USER CODE END 2 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
代码位置:
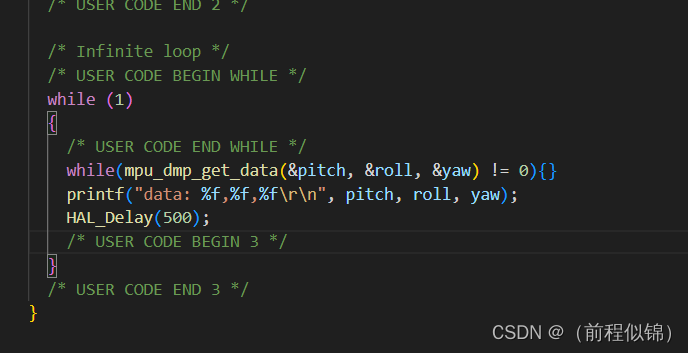
7、读取数值
/* USER CODE END WHILE */
while(mpu_dmp_get_data(&pitch, &roll, &yaw) != 0){}
printf("data: %f,%f,%f\r\n", pitch, roll, yaw);
HAL_Delay(500);
/* USER CODE BEGIN 3 */
- 1
- 2
- 3
- 4
- 5
代码位置:
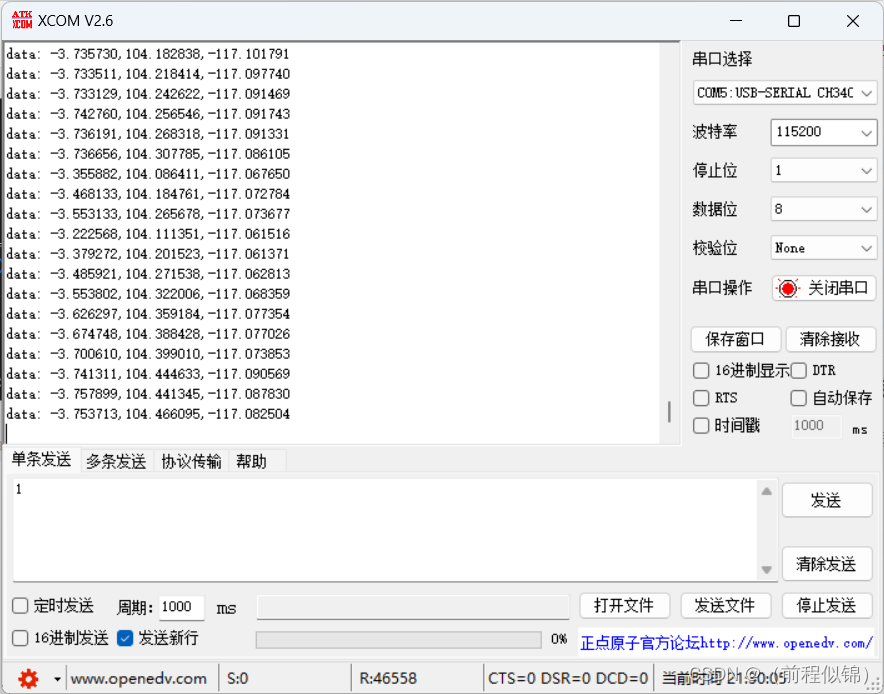
8、代码串口输出效果
三、总结
代码参考以下链接修改而来,如需要源码可以去他的 网页下载(我使用的是 F4 源码修改的):
链接: STM32F4/STM32F1手把手移植MPU6050欧拉角(HAL库,带源码)
今天改了一天,终于把他弄出来了!累,顺便写个记录!
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

