
热门标签
热门文章
- 1vue3 使用video-player 监听事件获取当前播放时间(全网首发)_video-player 获取当前播放时间
- 2Linux Ubuntu配置CPU与GPU版本tensorflow库的方法_linux tensorflow
- 3免费ai论文生成器在线(ai论文生成器免费版)_免费ai生成论文
- 4Codigger开发者篇:开启全新的开发体验(二)
- 5Mysql数据在磁盘上的存储结构
- 6fooocus+sdwebui+comfyui综合运用
- 7IDEA推送项目到gitee上,拉取gitee项目到IDEA中
- 8【Flink学习】NC工具安装使用 Linux命令 Windows安装_windows nc
- 9机器人路径规划:基于A*算法的机器人路径规划(提供Python代码)_a formal basis for the heuristic determination of
- 10【Three.js】手把手教你在三维场景中实现人物行走动画效果_threejs indoorwalking
当前位置: article > 正文
YOLOv8/YOLOv7/YOLOv5/YOLOv4/Faster-rcnn系列算法改进【NO.66】改进为旋转目标框检测_yolov8旋转框
作者:Cpp五条 | 2024-04-29 19:39:26
赞
踩
yolov8旋转框
前言
作为当前先进的深度学习目标检测算法YOLOv8,已经集合了大量的trick,但是还是有提高和改进的空间,针对具体应用场景下的检测难点,可以不同的改进方法。此后的系列文章,将重点对YOLOv8的如何改进进行详细的介绍,目的是为了给那些搞科研的同学需要创新点或者搞工程项目的朋友需要达到更好的效果提供自己的微薄帮助和参考。由于出到YOLOv8,YOLOv7、YOLOv5算法2020年至今已经涌现出大量改进论文,这个不论对于搞科研的同学或者已经工作的朋友来说,研究的价值和新颖度都不太够了,为与时俱进,以后改进算法以YOLOv7为基础,此前YOLOv5改进方法在YOLOv7同样适用,所以继续YOLOv5系列改进的序号。另外改进方法在YOLOv5等其他算法同样可以适用进行改进。希望能够对大家有帮助。
一、解决问题
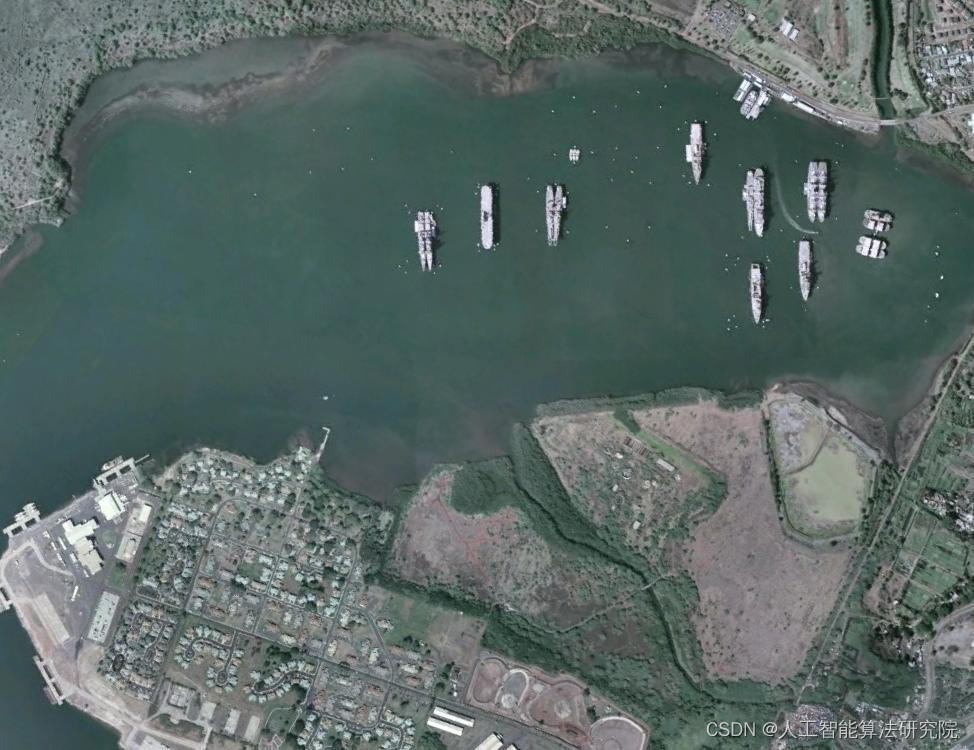
针对如下遥感场景下拍摄的图像或者无人机视角拍摄的图像,待测目标往往是杂乱无章,方向不同意的,特别是舰船等这种细长又相互紧密排列的目标,采用水平框标注的话,不容易标注,导致训练误差,检测效果不佳。
二、基本原理
有很多种OBB标注格式的数据集,比如dota、hrsc,也有很多关于这种检测的算法研究。包括有对Faster-rcnn以及YOLO算法进行改进为可以检测旋转框的算法。具体项目可关注后私信了解。
三、添加方法
相关代码如下:具体改进方法,关
推荐阅读
相关标签

