
热门标签
热门文章
- 1Logistic回归的基本原理(简单介绍)_logistic回归模型的理论基础
- 2PCB板上可以走100A的电流吗?大电流路径设置技巧_pcb焊盘十字连接过电流能力
- 3机器人运动学参数辨识(DH参数误差标定)_机器人运动学参数辨识方法
- 4 区块链共识机制简述
- 5Android SELinux开发入门指南之SELinux基础知识_selinux书
- 6Linux关于MySQL的卸载与安装详细教程(通过yum安装)_linux操作系统安装mysql5.7.44
- 7算法与数据结构 — 散列表_散列表装填因子计算
- 8BeanUtils源码解析
- 9Microsoft Visual C++ Runtime Library Runtime Error的解决的方法
- 10无人机超远距离WiFi传输,CV5200无线通信模组,无线音视频传输方案_无人机实时视频传输
当前位置: article > 正文
使用LQR做轨迹跟踪_双轮差速lqr轨迹跟踪
作者:Cpp五条 | 2024-04-29 23:16:14
赞
踩
双轮差速lqr轨迹跟踪
之前的轨迹跟踪的方法有些问题,最近换了LQR,具体的实现太细的理论也有人写过了,去看一下LQR、欧拉法、黎卡提相关的知识就好,区别是修改了一下模型,网上的大部分都是阿克曼模型的,我们是双轮差速的,然后重写了控制的类,主要调用部分自己的代码不方便给出来还用的网上的。
公式推导的话可以看一下这张图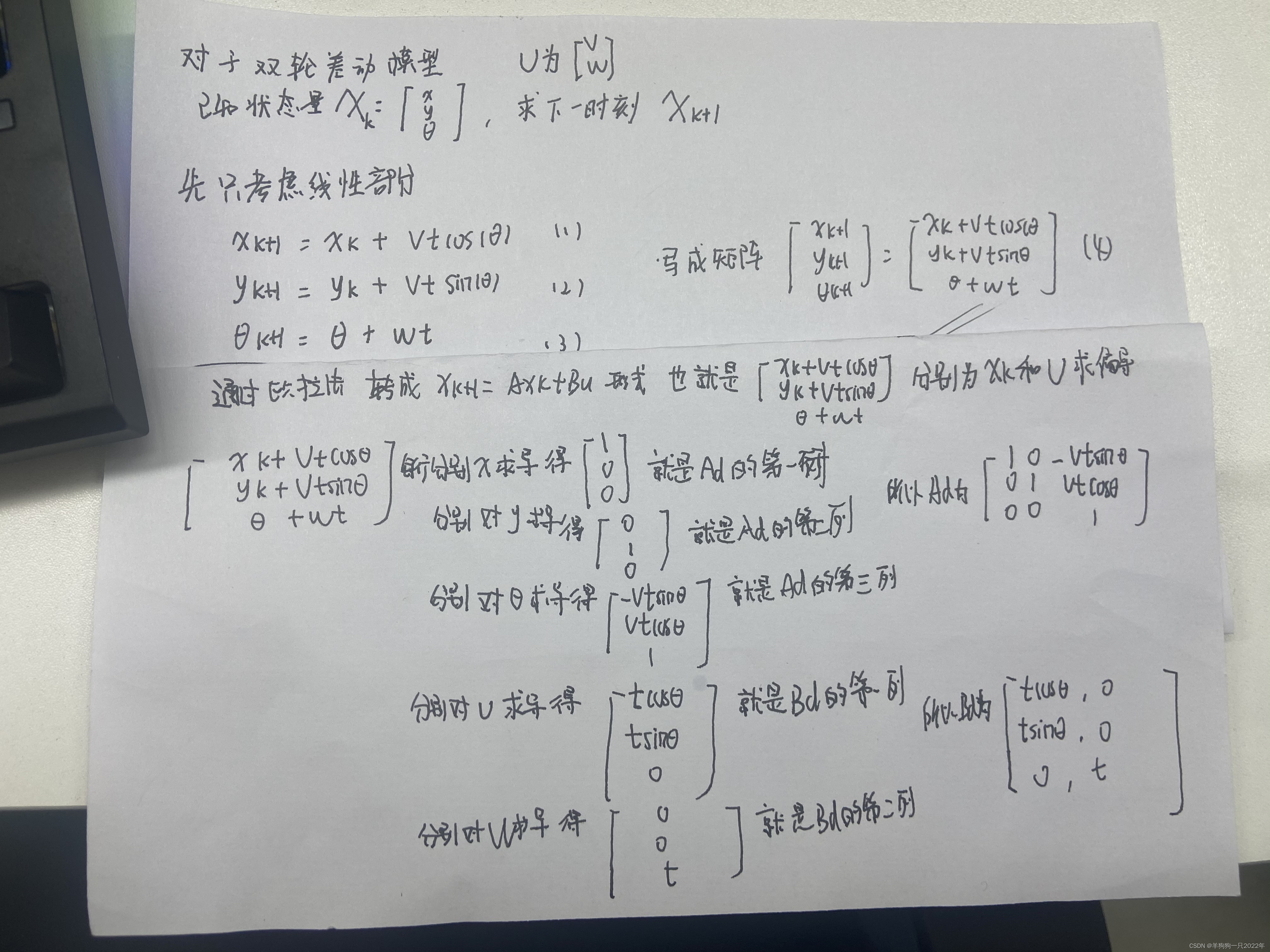
以下是仿真视频,绿色线是给定轨迹,红色点是控制机器人走的位姿
lqr轨迹跟踪模拟
以下是实际上车跑的视频
实车跑轨迹跟踪
最后给一下代码仓库
https://github.com/jiujiaowoxiaoyangba/lqr_track
最后如果嫌弃走起来在拐角处线速度有停顿可以把
U LQRController::LimitSpeed(U control_value) 删了,这块是怕实际车反馈、控制达不到加的
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Cpp五条/article/detail/510280
推荐阅读
相关标签

