
- 1支付宝小程序的开通流程_支付宝 小程序 教程
- 2Docker常见命令(以备不时之需)_docker 命令
- 3Android网络收集和ping封装库(1)_android ping
- 4Perl基础教程: 正则表达式_use not allowed in expression at
- 5基于GNURadio的USRP开发教程(2):深入认识USRP设备_usrp2954r
- 6字节跳动简历冷却期_【字节跳动招聘】简历这样写,才不会被秒拒
- 7Mybatis使用foreach标签实现批量插入_mybatis foreach批量insert
- 8轻松获奖五一数学建模和蓝桥杯_五一建模三等奖好得吗
- 9交易积累-量化交易
- 10Leetcode 238. 除自身以外数组的乘积
计算机视觉知识点-答题卡识别
赞
踩
之前跟同事聊过答题卡识别的原理,自己调研了一下,高考那种答题卡是通过一个专门的答题卡阅读器进行识别的,采用红外线扫描答题卡,被涂过2B碳的区域会被定位到,再加上一些矫正逻辑就能试下判卷的功能.这种方法的准确度很高.淘宝上查了下光标机的误码率是0.9999999(7个9).见下图.
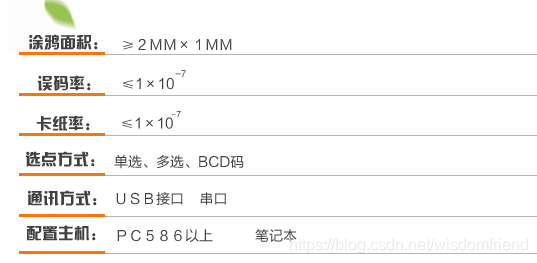
准确率高的离谱,机器长这个样子

这台机器的价格是15000, 有些小贵. 如果我想用简单的视觉方法做这个任务,不用外红设备,我应该怎么做呢.是不是用万能的yolo来做, 检测方形或者圆形的黑点行吗?这个方案当然可以,但是比较费劲,且效果不一定好.
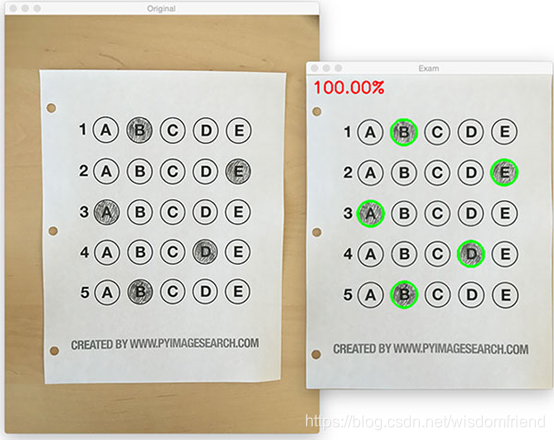
我今天要说的是采用传统的计算机视觉的方法来做,几行代码就能达到99%的准确率,虽然没有光标机的准确率高,但是我们只是玩一玩.我参考了这个这篇博客, 博主的名字叫Adrian, Adian的博客专注计算机视觉,推荐大家看看.
传统的方法大概有着几个步骤:
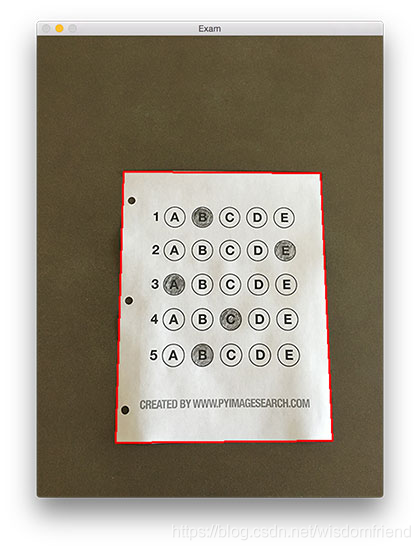
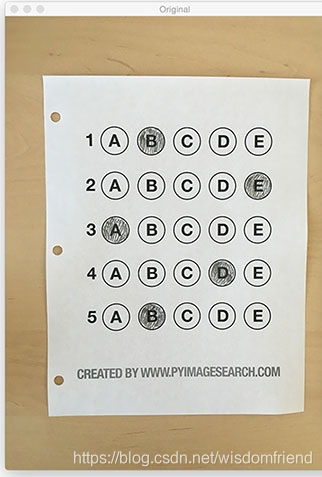
1 检测到答题纸的位置, 如下图
2 进行拉伸变化,把答题纸拉成矩形
3 检测黑色的区域和白色的区域
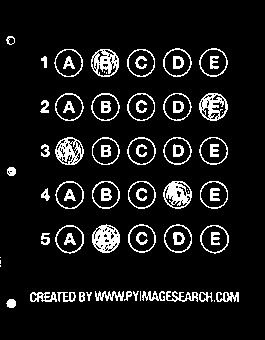
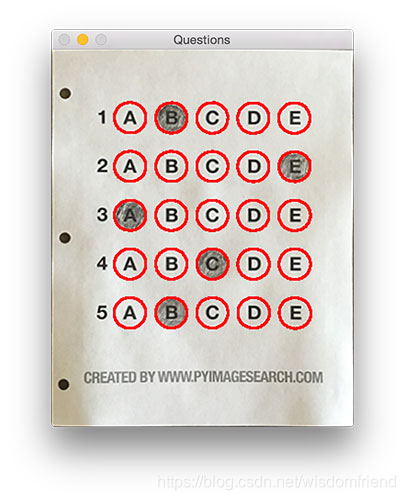
4 答案判定.
下面是一个python实现
- # import the necessary packages
- from imutils.perspective import four_point_transform
- from imutils import contours
- import numpy as np
- import argparse
- import imutils
- import cv2
- # construct the argument parse and parse the arguments
- ap = argparse.ArgumentParser()
- ap.add_argument("-i", "--image", default='image.jpg',
- help="path to the input image")
- args = vars(ap.parse_args())
- # define the answer key which maps the question number
- # to the correct answer
- ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
-
- # load the image, convert it to grayscale, blur it
- # slightly, then find edges
- image = cv2.imread(args["image"])
- gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
- blurred = cv2.GaussianBlur(gray, (5, 5), 0)
- edged = cv2.Canny(blurred, 75, 200)
-
- # find contours in the edge map, then initialize
- # the contour that corresponds to the document
- cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
- cv2.CHAIN_APPROX_SIMPLE)
- cnts = imutils.grab_contours(cnts)
- docCnt = None
- # ensure that at least one contour was found
- if len(cnts) > 0:
- # sort the contours according to their size in
- # descending order
- cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
- # loop over the sorted contours
- for c in cnts:
- # approximate the contour
- peri = cv2.arcLength(c, True)
- approx = cv2.approxPolyDP(c, 0.02 * peri, True)
- # if our approximated contour has four points,
- # then we can assume we have found the paper
- if len(approx) == 4:
- docCnt = approx
- break
-
- # apply a four point perspective transform to both the
- # original image and grayscale image to obtain a top-down
- # birds eye view of the paper
- paper = four_point_transform(image, docCnt.reshape(4, 2))
- warped = four_point_transform(gray, docCnt.reshape(4, 2))
-
- # apply Otsu's thresholding method to binarize the warped
- # piece of paper
- thresh = cv2.threshold(warped, 0, 255,
- cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
-
- # find contours in the thresholded image, then initialize
- # the list of contours that correspond to questions
- cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
- cv2.CHAIN_APPROX_SIMPLE)
- cnts = imutils.grab_contours(cnts)
- questionCnts = []
- # loop over the contours
- for c in cnts:
- # compute the bounding box of the contour, then use the
- # bounding box to derive the aspect ratio
- (x, y, w, h) = cv2.boundingRect(c)
- ar = w / float(h)
- # in order to label the contour as a question, region
- # should be sufficiently wide, sufficiently tall, and
- # have an aspect ratio approximately equal to 1
- if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
- questionCnts.append(c)
-
- # sort the question contours top-to-bottom, then initialize
- # the total number of correct answers
- questionCnts = contours.sort_contours(questionCnts,
- method="top-to-bottom")[0]
- correct = 0
- # each question has 5 possible answers, to loop over the
- # question in batches of 5
- for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
- # sort the contours for the current question from
- # left to right, then initialize the index of the
- # bubbled answer
- cnts = contours.sort_contours(questionCnts[i:i + 5])[0]
- bubbled = None
-
- # loop over the sorted contours
- for (j, c) in enumerate(cnts):
- # construct a mask that reveals only the current
- # "bubble" for the question
- mask = np.zeros(thresh.shape, dtype="uint8")
- cv2.drawContours(mask, [c], -1, 255, -1)
- # apply the mask to the thresholded image, then
- # count the number of non-zero pixels in the
- # bubble area
- mask = cv2.bitwise_and(thresh, thresh, mask=mask)
- total = cv2.countNonZero(mask)
- # if the current total has a larger number of total
- # non-zero pixels, then we are examining the currently
- # bubbled-in answer
- if bubbled is None or total > bubbled[0]:
- bubbled = (total, j)
-
- # initialize the contour color and the index of the
- # *correct* answer
- color = (0, 0, 255)
- k = ANSWER_KEY[q]
- # check to see if the bubbled answer is correct
- if k == bubbled[1]:
- color = (0, 255, 0)
- correct += 1
- # draw the outline of the correct answer on the test
- cv2.drawContours(paper, [cnts[k]], -1, color, 3)
-
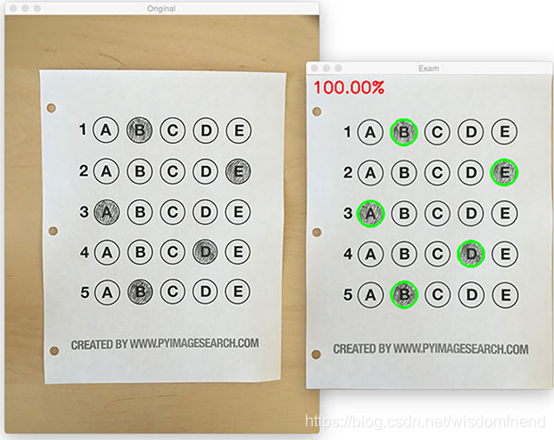
- # grab the test taker
- score = (correct / 5.0) * 100
- print("[INFO] score: {:.2f}%".format(score))
- cv2.putText(paper, "{:.2f}%".format(score), (10, 30),
- cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
- cv2.imshow("Original", image)
- cv2.imshow("Exam", paper)
- cv2.waitKey(0)

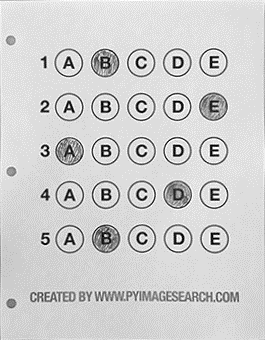
测试图片
代码运行方法:
python test.py --image images/test.jpg需要注意的事:
1 为什么不用圆检测?
圆检测代码有些复杂,而且要是涂抹的不是圆,或者不像圆该就难办了.
2 如何扩展成多选题?
修改是否被涂黑的判定逻辑就可以.
传统的计算机视觉是不是很好玩,传统的计算机视觉算法在一些限定场景下,效果还是不错的,比如室内光照恒定的情况,相机角度固定的情况.
感慨:
刚才看了下,我的上一篇博客还是在2015年,5年过去了,物是人非啊.2015年的时候我换了一个城市工作,压力很大,几年来,有顺心的事,也有烦心的事,不过总体还不错,祝福一下自己.
最后的话:
我是一个工作10年的程序员,工作中经常会遇到需要查一些关键技术,但是很多技术名词的介绍都写的很繁琐,为什么没有一个简单的/5分钟能说清楚的博客呢. 我打算有空就写写这种风格的指南文档.CSDN上搜蓝色的杯子, 没事多留言,指出我写的不对的地方,写的排版风格之类的问题,让我们一起爱智求真吧.wisdomfriend@126.com是我的邮箱,也可以给我邮箱留言.

