
- 1网络知识:服务器中的内网、外网介绍_内部业务子网,外部访问子网,外界广域网
- 2RT-DETR算法优化改进:多维协作注意模块MCA,暴力涨点,效果秒杀ECA、SRM、CBAM等 | 即插即用系列_mca注意力
- 3在sql语句中,like所有的用法_sql语句like用法
- 4fastdfs部署详解
- 51.爬虫解析字符串2.提取文档内容
- 6一文读懂Llama2的架构和推理过程_llama2架构
- 7ensp-DHCP的配置_华为 s5700 只允许一个端口开启dhcp
- 8关于ios的apple-app-site-association服务器nginx配置
- 9NLP(七十七)文本补全中的动态提示(Dynamic Prompting)_文本补全 预测缺失词语的语义
- 10今年一位双非的秋招回顾,寒气逼人...
图像处理基础——视觉感知要素及空间变化矩阵_光强和矩阵
赞
踩
本章重点掌握内容
- 视觉感知要素
- 像素间的一些基本关系,计算
- 空间变换的坐标公式与应用
- 灰度值插值小结
视觉感知要素
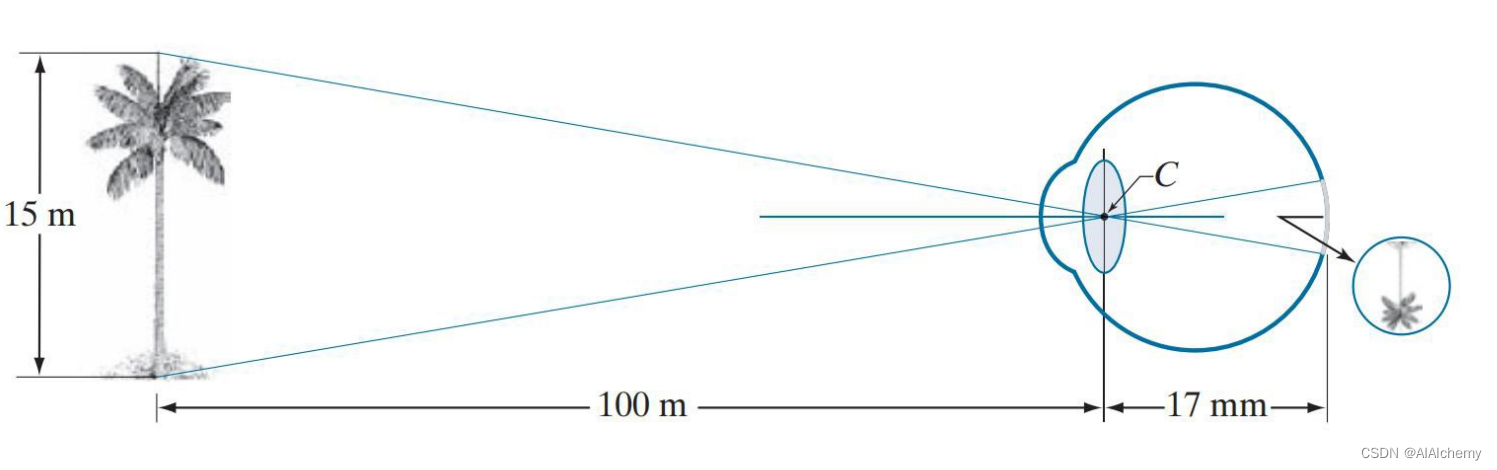
视网膜感受的颠倒信号,在通过视神经传导到大脑皮层的视觉中枢后,在视觉中枢实现自动翻转。
目录
亮度适应与辨别
主观亮度:即人眼感知到的亮度,是进入人眼的光强的对数函数
因为数字图像作为离散的灰度集来显示,所以眼睛对不同亮度级别之间的辨别能力在显示图像处理结果时是一个再要的考虑范围。
亮度适应现象:
- 视觉系统不能同时在一个光强度级别范围内工作
- 其可以同时辨别的不同强度级别的总范围与整个适应
- 感知亮度不是亮度的简单函数,
马赫带: 视觉系统往往会在不同强度区域的边界处出 现“ 下冲”或“上冲”现象(毛边)

同时对比:感知区域的亮度与背景亮度相关

中间的正方形亮度都是一样的,受背景的影响使他们看起来不太一样
人的视觉绝对不能同时在整个亮度适应范围工作,它是利用改变其亮度适应级来完成 亮度适应的。即所谓的亮度适应范围。同整个亮度适应范围相比,能同时鉴别的光强 度级的总范围很小。因此,白天进入黑暗剧场时,人的视觉系统需要改变亮度适应级, 因此,需要适应一段时间,亮度适应级才能被改变。
像素间的一些基本关系
相邻像素
- 4邻域
- D邻域
- 8邻域
4邻域
像素p(x,y)的4邻域是:(x+1,y);(x-1,y);(x,y+1);(x,y-1)
用表示像素p的4邻域

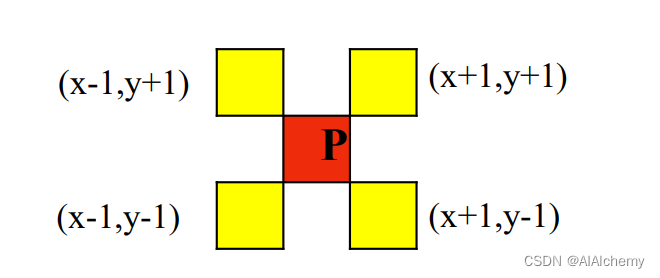
D领域
像素p(x,y)的D邻域是: 对角上的点 (x+1,y+1);(x+1,y-1);(x-1,y+1);(x-1,y-1)
用表示像素p的D邻域
8领域
像素p(x,y)的8邻域是: 4邻域的点 + D邻域的点
用表示像素p的4邻域

像素间的连通性
- 连通性是描述区域和边界的重要概念
- 两个像素连通的两个必要条件是: 两个像素的位置是否相邻 ,两个像素的灰度值是否满足特定的相 似性准则(或者是否相等)
- 4连通、8连通、m连通的定义
像素的连通性——4连通
对于具有值V的像素p和q,如果q在集合中,则称这两个像素是4 连通的
像素的连通性——8连通
对于具有值V的像素p和q,如果q在集合中,则称这两个像素是8连通的

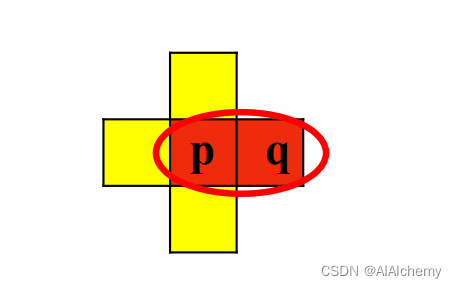
像素的连通性——m连通
- q在集合
中
- q在集合
中,并且
的交集为空(没有值V的像素) 则称这两个像素 是m连通的,即4连通和D连通的混合连通

红色格子代表像素值V,第二幅图因为存在交集,所以不是m连通
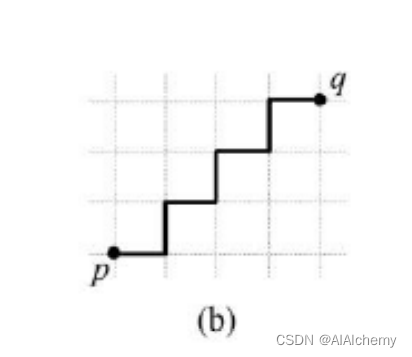
通路的定义
一条从具有坐标(x,y)的像素p,到具有坐标(s,t) 的像素q的通路,是具有坐标 (x0,y0),(x1,y1),...,(xn,yn)的不同像素的序列。其中,(x0,y0) = (x,y),(xn,yn) = (s,t), (xi ,yi ) 和 (xi -1,yi -1)是邻接的,1 ≤ i ≤ n,n 是路径的长度。如果(x0,y0) = (xn,yn) ,则该通路是闭合通 路。
距离度量
欧氏距离(也是范数为2的距离)
两个像素p和q之间的De距离为5

城区距离(也是范数为1的距离)
D4距离为7
棋盘距离(也是范数为 ꝏ 的距离)
D8距离为4

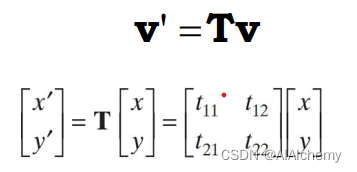
空间变换的坐标公式与应用
基本坐标变换
坐标的变换可借助矩阵写为:
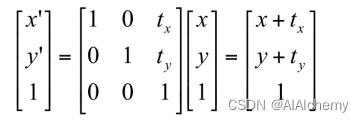
转换为齐次坐标系:

在计算机图像处理和计算机视觉领域,将图像的原本像素坐标转换为齐次坐标系有以下几个原因:
-
坐标统一性:齐次坐标系提供了一种统一的表示方式,可以用于表示不仅仅是二维坐标,还可以表示三维坐标和更高维度的坐标。这种统一性使得在处理不同类型的数据时更加方便,可以使用相同的数学工具和算法。
-
矩阵变换:齐次坐标系中的坐标变换可以使用矩阵乘法来表示,这种表示方式更加简洁和高效。通过将原本的像素坐标转换为齐次坐标,可以方便地进行平移、旋转、缩放和投影等几何变换操作,只需通过矩阵乘法来实现。
-
齐次坐标中的齐次性:齐次坐标系中的齐次性质使得可以方便地处理平行和无穷远点的情况。例如,在二维图像中,可以使用齐次坐标表示无穷远处的点,从而简化了计算。
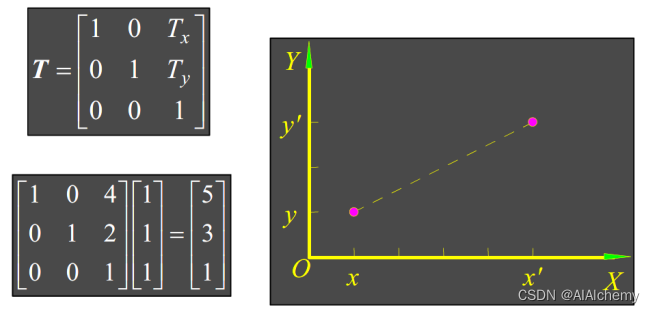
平移变换矩阵
放缩变换矩阵

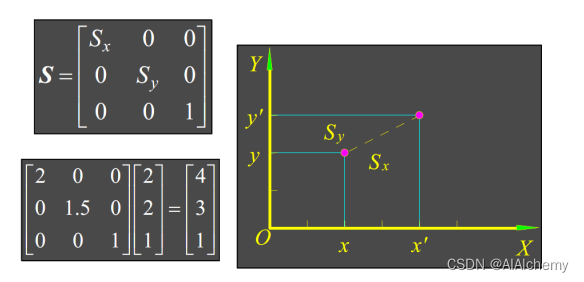
x‘变为原来的2倍,y'变为原来的1.5倍
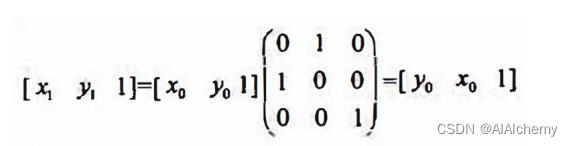
转置变化
将图像像素的x坐标y坐标进行互换,图像的大小往往会发生改变,宽高将会互换
旋转变换矩阵

灰度级插补
在数字图像处理中,几何变换由两个基本操作组成:
- 空间变换,它定义了图像平面上像素的重新安排;
- 灰度级插补,处理空间变换后图像中像素灰度级的赋值
数字图像处理只能对坐标网格点(离散点)的值进行变换。而坐标变换后产生的新坐 标值同网格点值往往不重合,因此需要通过内插的方法将非网格点的灰度值变换成网 格点的灰度值,这种算法称为灰度内插。
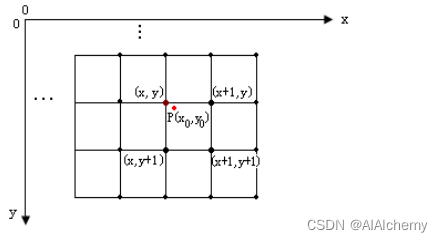
最邻近插值法
- 计算与点P(x0,y0)临近的四个点;
- 将与点P(x0,y0)最近的整数坐标点(x,y)的灰度值取为P(x0,y0) 点灰度近似值。
最近邻域内插实现上很简单,但这个方法经常有产生不希望的人为疵点的缺点, 如高分辨率图像直边的扭曲。可以用更完善的技术得到较平滑的结果。
线性插值方法
已知原始图像的两个相邻像素和
则插入像素位置x对 应的灰度值 f(x)为:

双线性插值的特点: 计算量大,但缩放后图像质量高,不会出 现图像不连续的情况。 具有低通滤波器的性质,使高频分量减弱,所以使图像的轮廓在一定程度上受损。
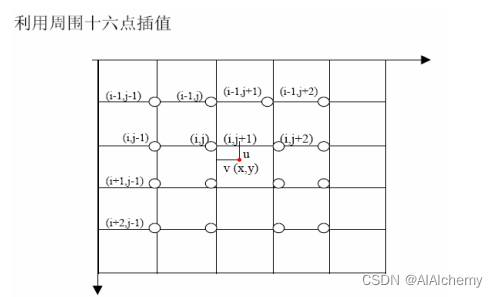
三阶插值
三次内插法是指用(x ,y)周围的16个网格点灰度按三次多项式进行内插的高精度算法
灰度插值要点
常用的灰度插值有几种,概括它们的优缺点。
- 最邻近插值法,这种方法简单效果不太好
- 双线性插值(一阶插值),计算量大,但缩放后图像质量高,不会出现图像不连续的情况
- 高阶插值,计算量最大,插值后图像的视觉质量最好

