
热门标签
热门文章
- 1python 串口读取数据及下发数据_python串口发送10进制数据
- 2No Silver Bullet: Essence and Accidents of Software Engineering(摘抄)_no silver bullet—essence and accidents of software
- 3麦克风阵列之一阶差分麦克风阵列_差分阵列
- 4oracle 10g inctype参数使用,oracle 10 以上提供的导入导出expdp&impdp及exp&imp命令详解讲解...
- 5服务器配置IPMI远程访问及排错_csdn 时空无限
- 6万字博文教你python爬虫Beautiful Soup库【详解篇】
- 7详解Linux-I2C驱动_i2c 时钟速率怎么使用adb查看
- 8【安装linux ubuntu系统初始化】_chushihua linux ubuntu
- 9Nginx学习笔记(一):Nginx介绍_nginx http全局块的意义
- 10LeetCode第206题反转链表(Python)_leetcode 206
当前位置: article > 正文
无人驾驶系列——概述_无人驾驶行业概述
作者:Gausst松鼠会 | 2024-03-09 06:21:43
赞
踩
无人驾驶行业概述
无人驾驶行业概述
什么是无人驾驶
A self-driving car, also known as an autonomous car, driver-less car, or robotic car (robo-car),is a car incorporating vehicular automation, that is, a ground vehicle that is capable of sensing its environment and moving safely with little or no human input.
能够感知周围的环境,用很少的人的参与来执行驾驶行为。
自动驾驶:某些情况下可以加入人的参与与监督。
无人驾驶:完全不依赖于人的行为,是为更高级的自动驾驶
无人驾驶能解决什么问题
- 提升交通效率
- 无人驾驶汽车严格遵守交通规则
- 道路通行更顺畅、拥堵减少、交通事故大大降低
- 隐形路口问题,通行效率提高45%
- 减少通勤时间
- 车辆利用率提升
- 缓解停车位紧张
- 无需停车位,点对点交通运输
- 共享交通方式将最大化普及
- 费用降低
- 交通事故问题
- 每年全球超过100万人死于车祸
- 93%的事故是人为造成的:醉驾、疲劳驾驶、分心驾驶
- 人类需要每次从零开始学习,总有新手司机上路,错误一遍遍重演
- 无人驾驶能够互联互通,比人更高效
无人驾驶发展历程
无人驾驶分级
自动驾驶分为6个级别
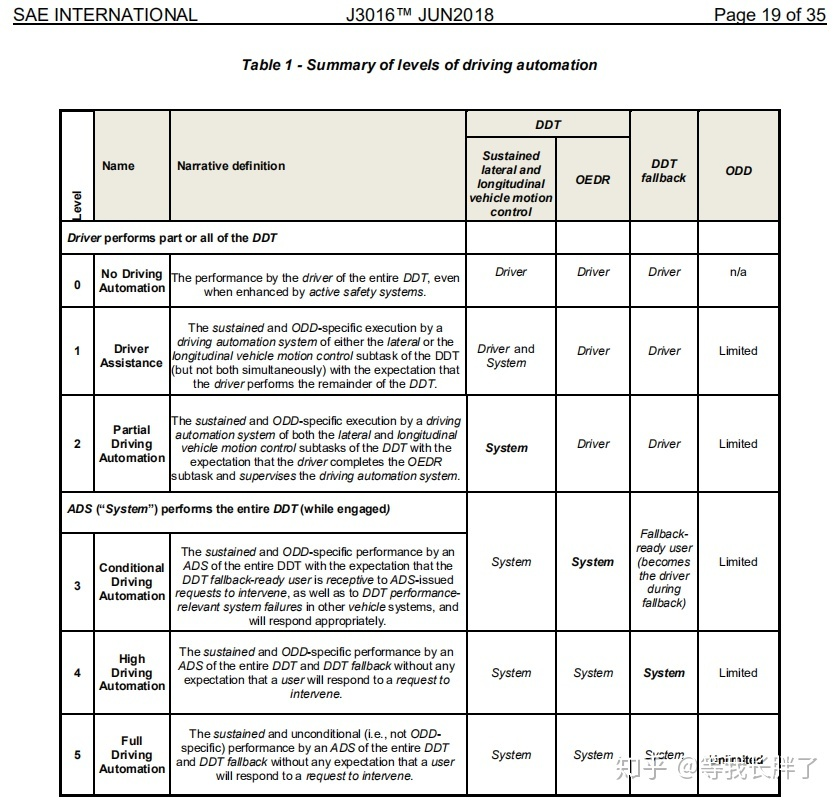
SAE:美国汽车工程师协会
L0:无自动化,全部人工
L1:巡航定速(Adaptive Cruise Control,ACC),巡航装置可以纵向控制车辆,可以加速减速
L2: 车道保持辅助(Lane Keeping)系统可以纵向控制也可以横向控制汽车,但车是辅助,人才是主导
L2.5: 可以提供简单路况下的变道能力;
L2与L3之间有一个鸿沟:权责问题
L3:在L2基础上提供编导能力,在某一时段内车是责任主体
L4: 相当于全无人驾驶,大部分时间由车来做主导
L5: 驾驶能力上几乎与人类没有关系,车辆上没有接管设备
L4级别无人驾驶
实现思路:
- V2X:Vehicle to Everything(车路协同)
- V2V(车辆)
- V2I(公共设施)
- V2P(行人)
- 边缘计算
- RSU(路侧单元)
- OBU(车载单元)
- 5G通信能力
- LTE-V协议:专门针对车间通讯的协议,可兼容4G-5G
- 路侧智能:强大的感知能力(百度ACE计划)
- 主车智能:近些年深度学习填补上了最后一块软件难题
- 感知能力:高度复杂冗余的传感器
- 决策能力:大数据下的智能决策
- 高精地图:丰富的地图信息数据
- 定位:精准的位置获取能力
- 权责问题如何处理?
- RSS模型(Responsibility-Sensitive Safety)责任敏感安全模型
- 为自动驾驶汽车与人类的责任概念提供具体可衡量的参数,并通过对所有记录在案的交通事故所涉及的行为进行分析和统计,为自动驾驶汽车界定了一个可计量的“安全状态”
无人驾驶技术路径
无人驾驶技术概述
L4自动驾驶系统架构

自动驾驶硬件概述

感知传感器
- 摄像头:广泛用于物体识别和物体追踪场景,比如车道线检测、交通灯识别等,一般无人驾驶车都安装环视多枚摄像头
- 激光雷达:用于障碍物位置识别、绘制地图、辅助定位等,准确率非常高,很多方案中将激光雷达作为主传感器使用
- 毫米波雷达:阴雨天、雾霾天能够辅助感知获取物体的位置和速度,观测距离远但误检较多
- 超声波:近处高敏感度传感器,常用于作为安全冗余设备检测车辆的碰撞安全问题
定位系统传感器
- IMU:实时测量自身的姿态,200Hz或更高,包含了三个单轴的加速度计和三个单轴的陀螺仪,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号
- GNSS:也是大家常听到的GPS,无人车一般使用RTK(载波相位差分技术)技术来进行定位、频率相对较低10Hz左右
车载计算单元(IPC)

- 高效连接计算单元内部各计算设备,连接外部传感器的信息输入和存储
- 冗余设计,以防止单点故障
- 需要考虑整体的车规、电磁干扰和振动方面的设计以及ISO-26262标准的要求
- ISO-26262:一个硬件达到了ASIL D级别的要求,那么它的故障率是10FIT,即10亿个小时里面出一次故障,汽车行业在安全方面可以做到的极限
车辆线控系统
- 自动驾驶线控系统:汽车的控制是由一些简单命令完成的,而不是由物理操作完成。这一部分相当于人的手和脚
- 传统汽车的这些控制由液压系统和真空助力泵协助完成,自动驾驶汽车的线控主要用电控化的零部件来完成,如电子液压制动系统
自动驾驶软件概述


操作系统OS
- RTOS:实时操作系统
- QNX:类Unix系统,具有强实时性,符合车规级的实时操作系统
- RT Linux:Linux内核补丁,通过软实时进行监控
- FrameWork:
- ROS(机器人操作系统)
- YARP、Microsoft Robotics、MOOS、Cybertron
高精地图 HD Map(High Dimensional)
- 不同于导航地图,最大的特点就是高纬度和高精度
- 道路网的精确三维表征,如交叉路口布局和路标位置
- 地图语义信息,如道路的速度限制、左转车道开始的位置
- 导航地图只能达到米级精度,高精地图需要达到厘米级精度
- 高精地图坐标系:WGS84、墨卡托坐标系
- 高精地图提供其它Level4模块的数据支持
- 提供了很多准确的静态物体的信息
- 定位可以用于计算相对位置
- 帮助传感器缩小检测范围,缩小ROI区域
- 计算道路导航信息
- 帮助车辆识别车道的确切中心线
定位Localization
- 无人车最重要的一步就是知道自己在哪
- INS:Inertial Navigation System惯性导航系统
- IMU:获取自身状态(加速度和角速度)后通过状态矩阵递推下一时刻位置
- 但是如果没有校正信息的话,这种状态递推会随着时间不断累计误差,导致最终位置发散
- RTK:载波相位差分系统(在GPS中加入了一个基站)
- GNSS
- RTK多入了一个静止基站,同样收到定位卫星的信号,无人车与RTK相隔不太远的情况下,对二者之间的干扰信号用差分抹平
- RTK通过较低的更新频率提供相对准确的位置信息,INS则以较高的频率提供和准确性较差的姿态信息。通过使用卡尔曼滤波整合两类数据获取其各自优势,合并提供出高准确性的实时信息
- 几何定位
- 激光雷达、摄像头、高精地图
- 利用激光雷达或者图像信息,可以通过物体匹配来对汽车进行定位。将检测的数据与预先存在的高精地图之间匹配,通过这种比较可获知汽车在高精地图上的全球位置和行驶方向
- 迭代最近点(ICP)、直方图滤波(Histogram Filter)
感知 Perception

- 四大基础任务:
- 找出物体在环境中的位置
- 明确对象是什么,比如人、红绿灯等
- 随时间的持续观察移动物体并保持一致
- 图像中的每个像素与语义类别进行匹配,如道路、汽车、天空,边界清晰
- 方式方法
- 图像、点云、雷达反射值数据:
- 监督学习、半监督学习、强化学习
- R-CNN、YOLO、SSD
- 计算融合问题:
- 前融合、后融合
预测 Prediction
- 实时性和准确性
- 基于状态进行预测
- 卡尔曼滤波
- Particle滤波
- 基于车道序列进行预测
- 通过机器学习模型化简为分类问题
- 行人预测:无人车需要非常重视安全问题,其中人的安全最为重要,而行人的意图变化却是最难预测的也是约束最少的,另外对于不同的障碍物也要有不同的理解,比如人和狗
决策 Planning
- 导航线路规划和精细轨迹表述
- 数学问题转换:将物理世界的地图转换为数学上的图表达
- 最优路径搜索:由于其他软件模块已经将不确定性进行了最大程度的消除,而最终决策规划模块又是对稳定性要求极高的模块,因此可以通过数学上的最优路径求解出确定解,遍历最优解是非常耗时的。
- 需要考虑车辆的体感和安全性

控制 Control
- 输入信息:目标轨迹、车辆状态;输出:方向盘、油门
- 实现对无人车的控制,我们需要知道踩刹车和减速的关系、踩油门和加速的关系等,当无人车拿到一些控制学参数后,通过电脑对无人车进行控制
- 控制是对整个驾驶最后的保障,因此需要在任何情况下对准确性、稳定性和时效性要求都非常高,需要通过对车辆模型精细化描述进行严格的数学表达
- 传统的控制算法PID可以满足车辆控制要求,但是考虑到体感和一些极限情况,控制算法优化也是目前无人车的一个持续探讨的问题,如LQR、MPC等
总结
我在哪

我周围有什么

他们到哪儿去
我该怎么走

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/213624
推荐阅读
相关标签

