
热门标签
热门文章
- 1机器学习笔记七-----------------使用Prophet(时间序列模型)预测家用电量的数据的笔记一------数据集解析_household electric power consumption
- 2andriod 回调传值_用最菜鸟的方式讲讲Android或者是Java中的回调传值
- 3【论文精读】AligNeRF_nerf mse损失
- 4一次地狱级面试
- 5HarmonyOS分布式数据服务_distributed_datasync
- 6[Go实战]go-modules vgo --goland_go downloading
- 7Mac用户如何下载并配置JDK_mac下载jdk
- 8基于chatGLM-6B模型微调详细教程(linux版)(ptuning & lora)_揽睿星舟 chatglm
- 9KeyEvent事件
- 10前端自己用的
当前位置: article > 正文
基于粒子群(PSO)的PID控制器matlab仿真
作者:Gausst松鼠会 | 2024-03-17 19:20:11
赞
踩
基于粒子群(PSO)的PID控制器matlab仿真
算法实现简介
利用粒子群算法对 PID 控制器的参数进行优化设计,其过程如图 所示。

图中,粒子群算法与 Simulink 模型之间连接的桥梁是粒子(即 PID 控制器参数)和该粒子对应的适 应值(即控制系统的性能指标)。优化过程如下:PSO 产生粒子群(可以是初始化粒子群,也可以是更 新后的粒子群),将该粒子群中的粒子依次赋值给 PID 控制器的参数 Kp、Ki、Kd,然后运行控制系统的 Simulink 模型,得到该组参数对应的性能指标,该性能指标传递到 PSO 中作为该粒子的适应值,最后判 断是否可以退出算法。
粒子在搜索空间中的速度和位置根据如下 公式确定:
![]()
其中, x 表示粒子的位置, v 表示粒子的速度, w 为惯性因子, c1 、 c2 为加速常数, r1 、 r2 为[0,1] 之间的随机数, Pt 是粒子迄今为止搜索到的最优位置,Gt 是整个粒子群迄今为止搜索到的最优位置。 PSO 的流程如下:
(1)初始化粒子群,随机产生所有粒子的位置和速度,并确定粒子的 Pt 和 Gt ;
(2)对每个粒子,将其适应值与该粒子所经历过的最优位置 Pt 的适应值进行比较,如较好,则将其 作为当前的 Pt ;
(3)对每个粒子,将其适应值与整个粒子群所经历过的最优位置 Gt 的适应值进行比较,如较好,则 将其作为当前的 Gt ;
(4)更新粒子的速度和位置;
(5)如果没有满足终止条件(通常为预设的迭代次数和适应值下限值),则返回步骤(2),否则, 退出算法,得到最优解。
仿真模型
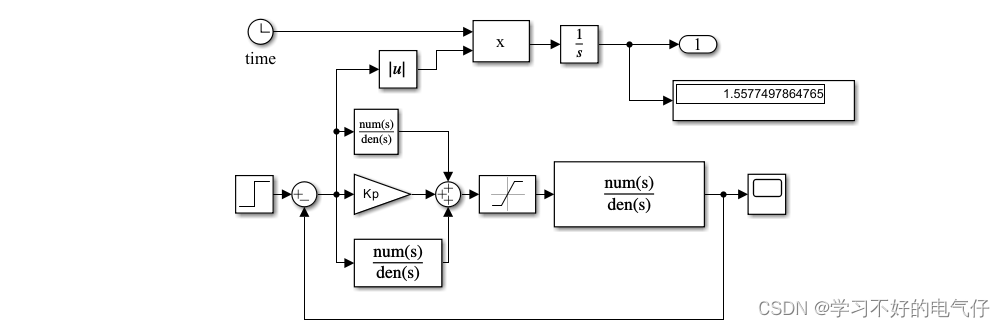
PSO程序

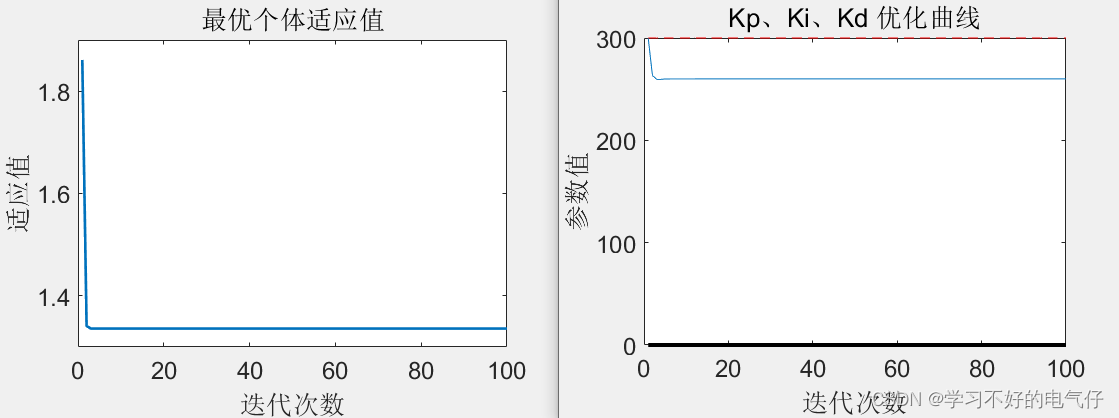
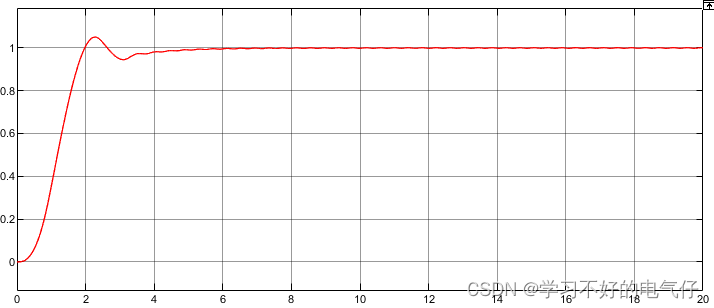
运行结果
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/257604
推荐阅读
相关标签

