
- 1图书推荐 | 深度序列模型与自然语言处理——基于 TensorFlow 2 实践
- 2Javascript-力扣-hot100-49. 字母异位词分组
- 3SpringBoot使用powermock来mock静态方法_springboot powermock
- 4基于前车换道意图的自适应巡航控制目标车辆选择算法
- 5lstm情感分析(keras)详解_keres lstm代码解析
- 6机器学习之One-Hot Encoding详解-- one-hot编码解释-数据预处理之独热编码(One-Hot Encoding)_将one hot格式转化为0 1格式
- 7Pytorch 模型部署方案_pytorch 部署
- 8python 中的dict的详细介绍_py的dict
- 9如何利用ChatGPT提升学术研究的效率
- 10NLP常见评价指标
【雷达】FMCW雷达系统信号处理建模与matlab仿真_毫米波雷达信号处理仿真
赞
踩
1 内容介绍
随着毫米波雷达技术的日益成熟和人们对安全性的迫切需要,近年来,防撞雷达系统得到了深入研究和广泛应用,如自动巡航控制、碰撞报警和防碰撞系统以及有待发展的雷达成像和汽车的自动驾驶系统等.中频和数字处理是防撞雷皮系统不可或缺的重要组成部分.因此如何能够提高雷达探测的快速性,准确性显得尤为重要. 本论文从FMCW探地雷达系统原理及其特性入手
2 部分代码
%% 功能:FMCW雷达发射信号、回波信号、混频、距离维FFT、速度维FFT建模仿真。
%%=========================================================================
clear all;
close all;
clc;
%% 雷达系统参数设置
maxR = 200; % 雷达最大探测目标的距离
rangeRes = 1; % 雷达的距离分率
maxV = 70; % 雷达最大检测目标的速度
fc= 77e9; % 雷达工作频率 载频
c = 3e8; % 光速
%% 用户自定义目标参数
r0 = 90; % 目标距离设置 (max = 200m)
v0 = 10; % 目标速度设置 (min =-70m/s, max=70m/s)
freq(i)=fc+slope*i*Tchirp/Nr; %发射信号时频图 只取第一个chirp
freq_echo(i)=fc+slope*i*Tchirp/Nr;%回波信号频谱延迟
end
Mix(i) = Tx(i).*Rx(i);%差频、差拍、拍频、中频信号
end
% %发射信号时域图
% figure;
% plot(Tx(1:1024));
% xlabel('点数');
% ylabel('幅度');
% title('TX发射信号时域图');
%
% % %发射信号时频图
% figure;
% plot(t(1:1024),freq);
% xlabel('时间');
% ylabel('频率');
% title('TX发射信号时频图');
%
% %接收信号时域图
% figure;
% plot(Rx(1:1024));
% xlabel('点数');
% ylabel('幅度');
% title('RX接收信号时域图');
%
% %接收信号与发射信号的时频图
% figure;
% plot(t(1:1024),freq);
% hold on;
% plot(td(1:1024)+t(1:1024),freq);
% xlabel('时间');
% ylabel('频率');
% title('接收信号与发射信号时频图');
% legend ('TX','RX');
%中频信号频谱 和频信号观察
%figure;
% plot(db(abs(fft(Mix(1:1024*256)))));%查看宽带的和频信号 将chirp的点数改为1024*256即可看到有一个门信号,但注意计算机内存。
% xlabel('频率');
% ylabel('幅度');
% title('中频信号频谱');
% figure;
% plot(db(abs(fft(Mix(1:1024)))));%查看宽带的和频信号 将chirp的点数改为1024*256即可看到有一个门信号,但注意计算机内存。
% xlabel('频率');
% ylabel('幅度');
% title('中频信号频谱');
%% 低通滤波 截止频率30MHz 采样频率120MHz
% Mix=lowpass(Mix(1:1024*256),30e6,120e6);
% plot(db(abs(fft(Mix(1:1024*256)))));
% xlabel('频率');
% ylabel('幅度');
% title('中频信号低通滤波器');
%reshape the vector into Nr*Nd array. Nr and Nd here would also define the size of
%Range and Doppler FFT respectively.
signal = reshape(Mix,Nr,Nd);
%
% figure;
% mesh(signal);
% xlabel('脉冲数')
% ylabel('距离门数');
% title('中频信号时域');
%% 距离维FFT
sig_fft = fft(signal,1024)./1024;
%% 距离FFT结果谱矩阵
figure;
mesh(abs(sig_fft));
xlabel('距离(频率)');
ylabel('chirp脉冲数')
zlabel('幅度')
title('距离维FTF结果')
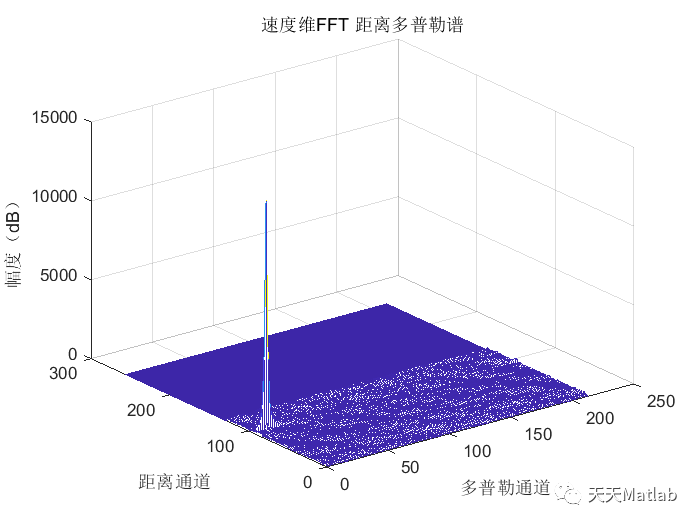
%% 速度维FFT
sig_fft2 = fft(signal.',128);
sig_fft2 = fftshift (sig_fft2);
figure;
mesh(abs(sig_fft2));
xlabel('多普勒通道'); ylabel('距离通道'); zlabel('幅度(dB)');
title('速度维FFT 距离多普勒谱');
%% END
3 运行结果

4 参考文献
[1]杨全丽. 智能化的雷达信号处理和FMCW雷达在煤粉仓料位测量中的建模仿真[D]. 太原理工大学.
[2]陈嘉成. FMCW雷达系统信号处理算法研究[D]. 国防科学技术大学.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机、雷达通信、无线传感器等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。

