
- 1Excel公式与函数实战应用-陈明霞-专题视频课程
- 2自编码器AutoEncoder
- 3HarmonyOS 应用开发之数据可靠性与安全性&数据库备份与恢复
- 4PyTorch Quantization简介_pytorch quantization simulation
- 5为什么安装了pillow库,还是导入PIL?_python3里面虽然安装的是pillow,但是导入的时候还是从pil进行导入。
- 6如何在以太坊上存一张图片_怎样把图片记录到以太坊区块
- 7Attention机制【图像】_图像attention机制
- 8【面试招聘】拼多多 AI算法岗面试(附带解析)
- 9全面梳理chatGPT常用提示词,看我这一篇就够了!(同样适用于国内大语言模型)_chat gpt提示词全部汇总
- 10【数据结构与算法】图论及其相关算法_图论算法
Google视觉机器人超级汇总:从RT、RT-2到AutoRT/SARA-RT/RT-Trajectory、RT-H
赞
踩
前言
随着对视觉语言机器人研究的深入,发现Google的工作很值得深挖,比如RT-2
想到很多工作都是站在Google的肩上做产品和应用,Google真是科技进步的核心推动力,做了大量大模型的基础设施,服(推荐重点关注下Google deepmind的工作:https://deepmind.google/discover/blog/)
故有了本文,单独汇总Google在机器人领域的重大结果、进展
第一部分 从RT-1到RT-2
1.1 RT-1:首个Transformer机器人
RT-1(项目地址:https://robotics-transformer1.github.io/,paper地址:RT-1: Robotics Transformer for Real-World Control at Scale)
// 待更
1.2 RT-2:给VLM加上动作模态RT1,从而变成VLA
尽管之前的研究在包括机器人学在内的各种问题和设置上研究了VLMs,但Google
- 一方面,为了赋予VLMs预测机器人动作的能力,以来扩展其在机器人闭环控制中的能力,从而利用VLMs中已有的知
- 识实现新的泛化水平(While prior works study VLMs for a wide range of problems and settings including in robotics, our focus is on how the capabilities of VLMs can be extended to robotics closed-loop control by endowing them with the ability to predict robot actions, thus leveraging the knowledge already present in VLMs to enable new levels of generalizatio)
- 二方面,更为了使得模型权重可以完全共享在语言和动作任务之间,而不需要引入仅针对动作的模型层组件(we leverage VLMs that generate language, and the unified output space of our formulation enables model weights to be entirely shared across language and action tasks, without introducing action-only model layer components)
故于23年7 月,Google DeepMind宣布推出RT-1的进化版(使用上一代机器人模型RT-1的数据进行训练,数据上虽然没变,但训练方法大大增强了):RT-2,其将视觉文本多模态大模型VLM具备的数学、推理、识别等能力和机器人比如RT-1的操作能力结合到一块了
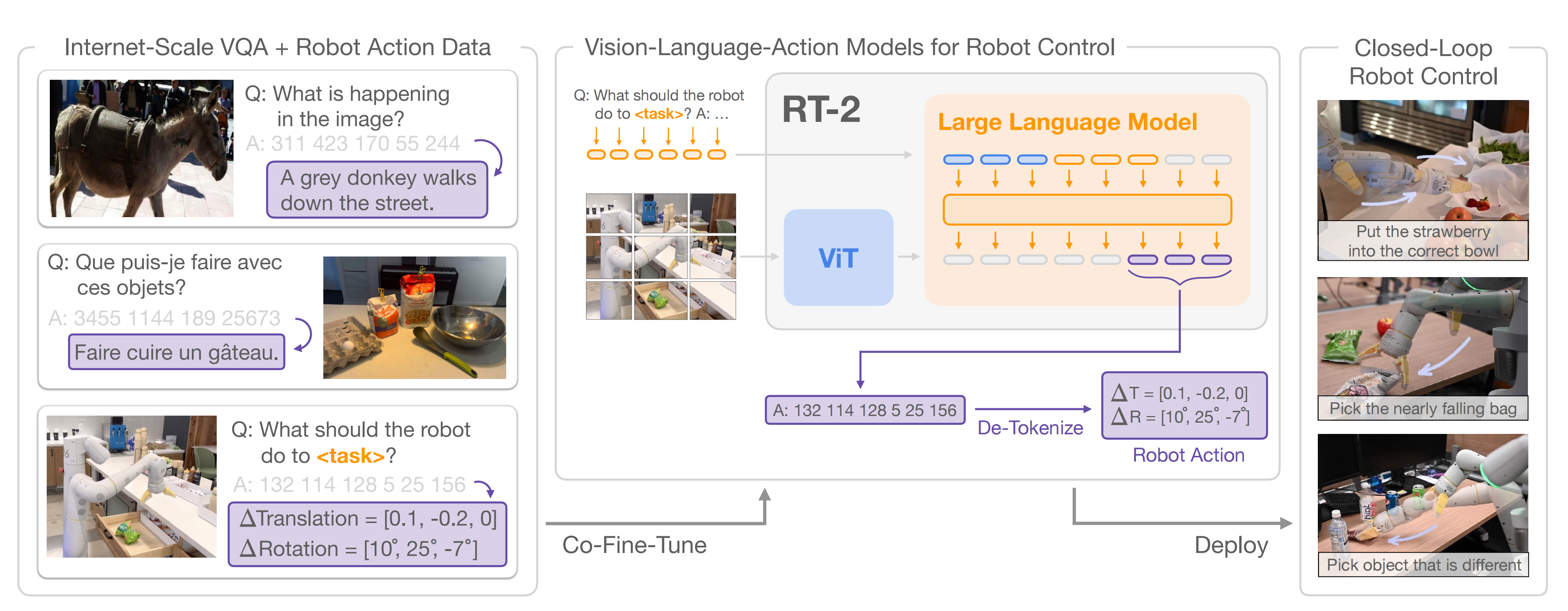
为了实现对「VLM之看听想」与「RT-1之操控」两者能力上的结合
- Google给视觉-文本大模型(VLM,比如5B和55B的PaLI-X、3B的PaLI以及12B的PaLM-E)增加了一个模态,叫做“机器人动作模态”,从而把它变成了视觉-文本-动作大模型(VLA),比如RT-2-PaLM-E和RT-2-PaLI-X
- 随后,将原本非常具体的机器人动作数据,转变成文本token,例如将转动度数、放到哪个坐标点等数据,转变成文本“放到某个位置”
这样一来,机器人数据也能被用到视觉-语言数据集中进行训练,同时在进行推理的过程中,原本的文本指令也会被重新转化为机器人数据,实现控制机器人等一系列操作
1.2.1 RT-2的三大能力:符号理解、推理、人类识别
其具备三大能力
- 符号理解(Symbol understanding),或者叫物体理解
能将大模型预训练的知识,直接延展到机器人此前没见过的数据上
例如机器人数据库中虽然没有“红牛”,但它能根据大模型预训练识所具备的知识中理解并掌握“红牛”的外貌,从而最终拿捏到所需物品 - 推理(Reasoning),这也是RT-2的核心优势,要求机器人掌握数学、视觉推理和多语言理解三大技能,比如
技能一,包含数学逻辑推理的命令,“将香蕉放到2+1的总和的位置”:
甚至能主动思考,比如给定指令「选择灭绝的动物」之后,它可以完成多个阶段的推理,从而最终抓取桌子上的塑料恐龙
- 人物识别(Human recognition)
比如只需要向对话一样下达命令:“将水递给泰勒·斯威夫特”,它就能在一堆图片中辨认出霉霉(Taylor Swift,美国当代歌手),送给她一罐可乐
1.2.2 机器人动作微调(Robot-Action Fine-tunin)
为了使视觉-语言模型能够控制机器人,将行动表示为模型输出中的token,这些token与语言token的处理方式相同
- 行动编码基于RT-1模型提出的离散化方法
行动空间包括机器人末端执行器的6自由度位置和旋转位移,以及机器人夹持器的伸展程度和用于终止情节的特殊离散命令,该命令应由策略触发以表示成功完成 - 连续维度(除了离散终止命令之外的所有维度)均均匀地离散为256个箱子,因此,机器人行动可以使用离散箱子的序数表示为8个整数
The continuous dimensions (all dimensions except for the discrete termination command) are discretized into 256 bins uniformly. Thus, the robot action can be represented using ordinals of the discrete bins as 8 integer numb - 为了将这些离散化的行动用于将视觉-语言模型微调为视觉-语言-行动模型,我们需要将模型的现有token化与离散行动箱子相关联(we need to associate tokens from the model’s existing tokenization with the discrete action bins)。这需要保留256个token作为动作token,而选择哪些token取决于每个VLM使用的特定分词方式
- 为了定义VLM微调的目标,我们通过简单地将每个维度的动作token用空格字符连接起来,将动作向量转换为单个字符串
"terminate ΔposxΔposyΔposzΔrotxΔrotyΔrotz gripper_extension"
这样一个目标的可能实例是:“1 128 91 241 5 101 127”
再比如“指令:我饿了” 、计划:挑选rxbar巧克力、行动:1 128 124 136 121 158 111255
我们在实验中微调的两个VLMs,PaLI-X和PaLM-E,使用不同的分词方式。 对于PaLI-X模型,每个整数最多可以有一个唯一的token,因此我们只需将动作区间与表示相应整数的token相关联
对于PaLM-E模型,它没有提供这种方便的数字表示,因此我们只需覆盖最不常用的256个token来表示动作词汇。 值得注意的是,训练VLMs以覆盖现有token与动作token是symbol tuning的一种形式,在先前的工作中已经证明对VLMs非常有效
最终,通过采取上述行动表示,我们将机器人数据转换为适合于VLM模型微调的形式,其中我们的输入包括机器人摄像头图像和文本任务描述(使用标准的VQA格式“Q:机器人应该采取什么行动来完成[任务指令]?A:”),我们的输出格式为表示机器人行动的数字/最不常用的标记的字符串(and our output is formatted as a string of numbers/least frequently used tokens representing a robot action)
值得注意的是,同时使用原始的VLM训练数据和机器人数据对VLM微调,得到的效果相对最好(we use both the original VLM training data as well as robotic data for VLM fine-tuning)

此外,推理的时候用的最大模型是55B参数的RT-2-PaLI-X-55B模型,可以以1-3 Hz的频率运行,而该模型的较小版本由5B参数组成,可以以约5 Hz的频率运行
1.2.3 训练数据:PaLI-X/PaLM-E和RT-1的机器人演示数据
对于训练数据,我们利用了
- Pali-x: On scaling up a multilingual vision and language model和Palm-e: An embodied multimodal language model(一作为Driess)的原始网络规模数据,其中包括视觉问答、字幕和非结构化交织的图像和文本示例
- 然后将其与RT-1的机器人演示数据相结合(该数据在办公室厨房环境中使用13台机器人在17个月内收集而来)
每个机器人演示轨迹都用自然语言指令进行了注释,描述了执行的任务,包括描述技能的动词(例如,“拾取”,“打开”,“放入”)和描述操作对象的一个或多个名词(例如,“7up罐”,“抽屉”,“餐巾纸”)
对于RT-2训练过程中的参数设置,采用了原始PaLI-X和PaLM-E论文中的超参数,包括学习率调度和正则化
1.2.4 Q-Transformer与Open X-Embodiment 数据集
在 RT-2 之后,谷歌 DeepMind 又提出了 Q-Transformer,机器人界也有了自己的 Transformer 。Q-Transformer 使得机器人突破了对高质量的演示数据的依赖,更擅长依靠自主「思考」来积累经验
RT-2 发布仅两个月,又迎来了机器人的 ImageNet 时刻。谷歌 DeepMind 联合其他机构推出了 Open X-Embodiment 数据集,改变了以往需要针对每个任务、机器人具体定制模型的方法,将各种机器人学的知识结合起来,创造出了一种训练通用机器人的新思路。
想象一下,只需向你的机器人小助理发出「为我打扫房子」或「为我们做一顿美味健康的饭菜」等简单的要求,它们就可以完成这些工作。打扫房间或做饭这种任务,对于人类来说很简单,但对于机器人来说,可真不容易,需要它们对世界有深度理解。
第二部分 先泛化后加速最后造数据:RT-Trajectory、SARA-RT、AutoRT
Google认为,要生产出真正可进入现实世界的机器人,必须要解决两个基本挑战:
- 新任务推广能力
- 提高决策速度
本次三连发的前两项成果就主要在这两大领域作出改进,且都建立在谷歌的基础机器人模型RT之上
于是在23年年初,谷歌宣布了一系列机器人研究进展:AutoRT、SARA-RT 和 RT-Trajectory,它们能够帮助机器人更快地做出决策,更好地理解它们身处于怎样的环境,更好地指导自己完成任务
接下来,让我们回顾一下这几项重要研究
2.1 RT-Trajectory:帮助机器人泛化,使得没见过的任务也能直接做
人类可以直观地理解、学会如何擦桌子,但机器人却不是很懂。不过好在我们可以通过多种可能的方式将这一指令传达给它,让它作出实际的物理行动
传统上,对机械臂的训练依赖于将抽象的自然语言(擦桌子)映射到一个个特定的动作,然后让机械臂完成,例如对于擦桌子,就可以拆解为:合上夹具、向左移动、向右移动,但很明显,这种方式的泛化能力很差,从而使得模型很难推广到新任务中
在此,谷歌新提出的RT-Trajectory模型(对应paper为:RT-Trajectory: Robotic Task Generalization via Hindsight Trajectory Sketches)通过解释具体的机器人动作(即描述训练视频或草图中的机器人动作),使 RT 模型能够理解 「如何完成」任务,具体而言
- RT-Trajectory 将训练数据集中的每段视频与机器人手臂执行任务时抓手的 2D 轨迹草图叠加在一起。这些轨迹以RGB图像的形式呈现,包括路线和关键点,在机器人学习执行任务时提供低级但非常实用的提示
- 在对训练数据中未见的 41 项任务进行测试时,由 RT-Trajectory 控制的机械臂的性能比现有的 SOTA RT 模型高出一倍多:任务成功率达到 63%,而 RT-2 的成功率仅为 29%
该系统的用途十分广泛,RT-Trajectory可以用多种方式来创建轨迹,包括:通过观看人类演示、接受手绘草图,以及通过VLM来生成

具体效果如下图所示
- 左图:只使用自然语言数据集训练的 RT 模型控制的机器人,在执行擦桌子这一新任务时受挫,而由 RT 轨迹模型控制的机器人,在经过 2D 轨迹增强的相同数据集训练后,成功规划并执行了擦拭轨迹
- 右图:训练有素的 RT 轨迹模型在接到新任务(擦桌子)后,可以在人类的协助下或利用视觉语言模型自行以多种方式创建 2D 轨迹
RT 轨迹利用了丰富的机器人运动信息,这些信息存在于所有机器人数据集中,但目前尚未得到充分利用。RT-Trajectory 不仅代表着在制造面向新任务高效准确移动的机器人的道路上又迈进了一步,而且还能从现有数据集中发掘知识
2.1 SARA-RT:让机器人的决策速度务必更快
泛化能力上来以后,我们再来关注决策速度
虽然 Transformer 功能强大,但它们可能会受到计算需求的限制,从而减慢决策速度。因为Transformer 主要依赖于二次复杂度的注意力模块。这意味着,如果 RT 模型的输入增加一倍(例如,为机器人提供更多或更高分辨率的传感器),处理该输入所需的计算资源就会增加四倍,从而导致决策速度减慢
为了提高机器人的速度,谷歌在基础模型Robotics Transformer上开发了SARA-RT
SARA-RT使用一种新的模型微调方法让原来的RT模型变得更为高效,这种方法被谷歌称之为“向上训练”,它主要的功能就是将原来的二次复杂度转换为线性复杂度,同时保持处理质量
当 SARA-RT 应用于拥有数十亿个参数的 SOTA RT-2 模型,它能在各种机器人任务中实现更快的决策和更好的性能:
用于操纵任务的 SARA-RT-2 模型。机器人的动作以图像和文本指令为条件。
凭借其坚实的理论基础,SARA-RT 可应用于各种 Transformer 模型。例如,将 SARA-RT 应用于点云 Transformer (用于处理来自机器人深度摄像头的空间数据),其速度能够提高一倍以上
2.3 AutoRT:数据不够?自己创造! ——极大利好机器人数据的收集
在高层次上,AutoRT(对应论文为:AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents,Submitted on 23 Jan 2024)通过开放词汇表对象检测器收集数据
- 首先对场景进行理解和描述
- 然后LLM解析该描述,在给定高层目标的情况下生成明智且安全的语言目标
- 最后使用LLM确定如何执行这些目标
AutoRT采用了一个带有摄像头、机械臂和移动基座的移动机械手作为机器人平台。在此处,我们仅考虑操作数据的收集,因此导航只用于获取不同操作设置——然而值得注意的是该系统对其他机器人实现和收集模式也具有通用性
AutoRT 结合了大型基础模型(如LLM或VLM,和机器人控制模型RT-1/RT-2,创建了一个可以在新环境中部署机器人用以收集训练数据的系统。AutoRT 可以同时指导多个配备了视频摄像机和末端执行器的机器人,在各种各样环境中执行多样化的任务
2.3.1 探索阶段:导航到目标
- 第一步是对空间进行探索,并找到有趣的场景进行操作(The first stage of AutoRT is to explore the space and find interesting scenes for manipulation)
为了绘制环境,我们采用了 Chen 等人提出的自然语言地图方法,该方法利用 VLM 构建,将物体检测编码为视觉语言嵌入,相应位置
由机器人的深度传感器和 SLAM 确定
Tomap the environment, we use the natural language map approach proposed by Chen et al. (Open-vocabulary queryable scene representations for real world planning),which is built using a VLM to encode object detections into visual-language embeddings φi, with corresponding position (xi,yi,zi) determined by the robot’s depth sensor and SLAM.
因此,给定一个类似于“海绵”的文本目标,我们可以通过查询接近
Thus, givena textual target q like “sponge”, we can direct the robot towards a sponge by querying for a φithat is close to the text embedding for q. - 为了确定导航目标,在感兴趣区域中采样状态时,我们根据之前看到对象的平均嵌入与潜在距离成比例进行采样
To determine navigation goals we sample this map forregions of interest via sampling states proportional to their latent distance to an average embeddingof previously seen objects (see Appendix B for more details)
每个环境只生成一次该地图,并复制到所有收集机器人所在空间中,并从缓存中加载以节省未来情节时间
For each environment, this map isgenerated once, then copied to all robots collecting in the space and loaded from cache to save timein future episodes.
总之,机器人先在环境中进行探索(场景和物体由VLM描述),然后随机选择导航目标并靠近物体(并提供LLM文本作为机器人生成操纵任务的依据),最终机器人能有效执行任务,且对结果进行评分,并重复该过程,这种方法不需要事先了解环境布局或其中包含的物体
具体来说
- 每个机器人将根据 AutoRT,使用视觉语言模型VLM来「看看四周」,了解其环境和视线内的物体
- 接下来,大型语言模型会为其提出一系列创造性任务,例如「将零食放在桌子上」,并扮演决策者的角色,为机器人选择需要执行的任务
下图图呈现了 AutoRT 系统的运作过程(绿色部分是本工作的贡献):
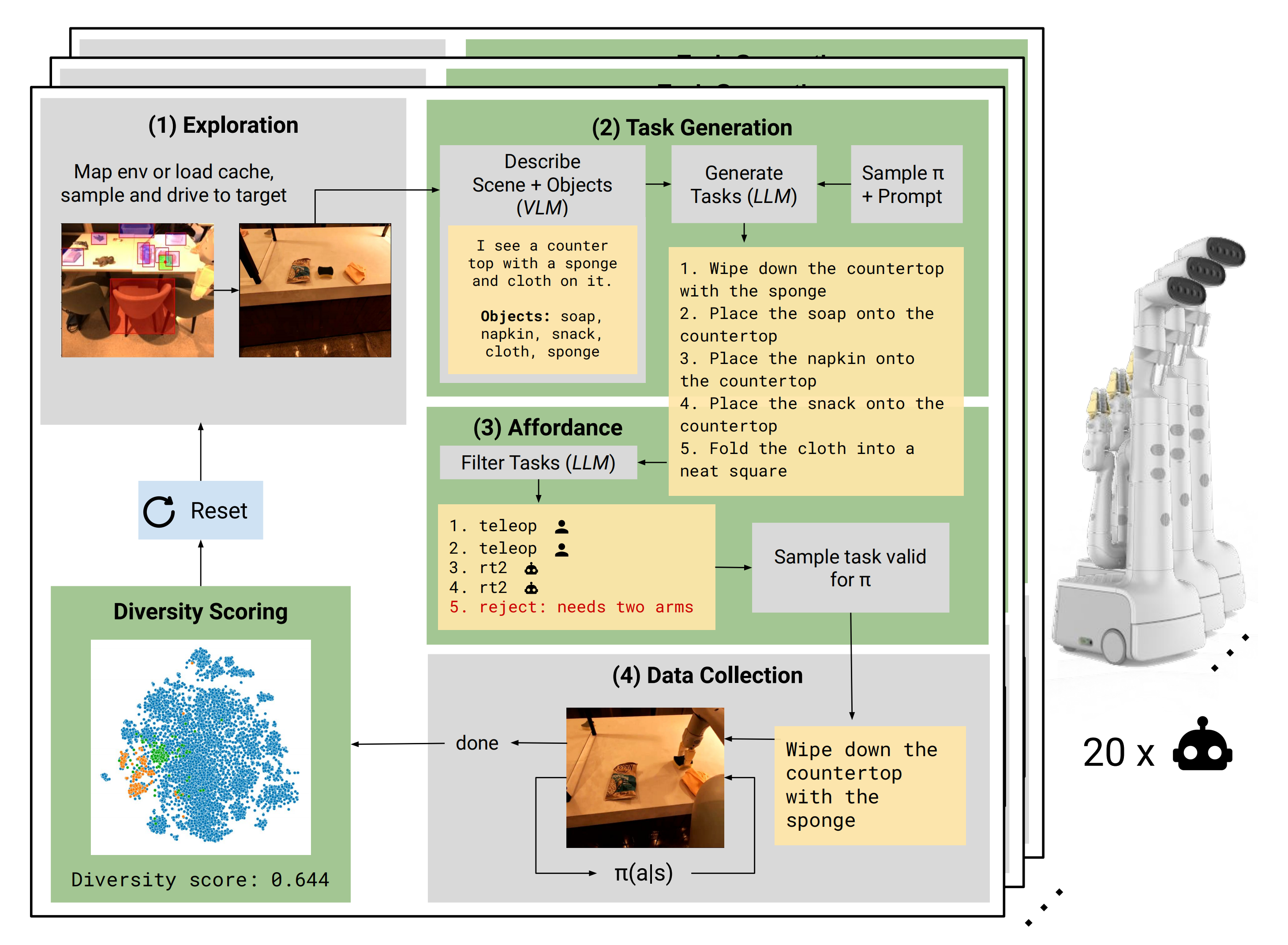
- 自主轮式机器人找到了一个有多个物体的位置
- VLM 向 LLM 描述场景和物体
- LLM 为机器人提出各种操作任务,并决定哪些任务机器人可以独立完成,哪些任务需要人类远程控制,哪些任务不可能完成,然后做出选择
- 机器人尝试选择要做的任务,收集实验数据,并对数据的多样性和新鲜度进行评分
机器人将不断重复这个过程
2.3.2 任务列表的生成
在机器人操作场景之前,需要生成一个操纵任务列表。这个过程包括两个步骤:
- 场景描述:根据机器人摄像头拍摄的图像,VLM会输出文本来描述机器人观察到的场景以及其中存在的五个物体。例如,在给定场景中,VLM列出了肥皂、餐巾、零食、布和海绵
Given an image from the robot camera, a VLM outputs text describing thescene the robot observes, and 5 objects that exist in that scene. For example, as shown in Fig. 5,the VLM lists soap, napkin, snack, cloth, sponge in the given scene.
-
任务建议:在这一步中,AutoRT会提示生成任务列表。提示首先提供系统角色说明,比如“我是在办公环境中操作的机器人”,以指导LLM扮演相应角色。然后通过由机器人constitution编写的任务生成规则列表结束
Task proposal: In this step, AutoRT is prompted to generate a list of tasks. This prompt beginswith a system prompt, such as: “I am a robot operating in an office environment”, which describesthe role the LLM should play. It continues with a list of rules that should be followed for taskgeneration, codified by the robot constitution.
提示部分还可以注入之前VLM调用中得到的场景和对象描述信息。基于这些提示,LLM会生成一个潜在的操纵任务列表。值得注意的是,为了保持底层模型通用性,并没有针对我们特定用例进行LLM微调
The prompt ends with a section, where we can inject the scene and object description from the prior VLM call. Given this prompt, an LLMgenerates a list of potential manipulation tasks (see Fig. 5). We note, the LLM is not fine-tuned toour specific use case to maintain the generality the underlying model.
研究人员在现实世界中对 AutoRT 进行了长达七个月的广泛评估。实验证明,AutoRT 系统能够同时安全地协调多达 20 个机器人,最多时共能协调 52 个机器人。通过指导机器人在各种办公楼内执行各种任务,研究人员收集了涵盖 77,000 个机器人试验,6,650 个独特任务的多样化数据集
第三部分 RT-H
// 待更
参考文献与推荐阅读
- 的
- 关于RT-2的报道
机器人ChatGPT来了:大模型进现实世界,DeepMind重量级突破
谷歌AGI机器人大招!54人天团憋7个月,强泛化强推理,DeepMind和谷歌大脑合并后新成果 -
关于Google家务机器人的报道
谷歌DeepMind机器人成果三连发!两大能力全提升,数据收集系统可同时管理20个机器人,量子位
谷歌家务机器人单挑斯坦福炒虾机器人!端茶倒水逗猫,连甩三连弹开打,新智元
大模型正在重构机器人,谷歌Deepmind这样定义具身智能的未来,机器之心 - Google机器人三项成果
https://deepmind.google/discover/blog/shaping-the-future-of-advanced-robotics/ - RT-2 的后续,RT-H:https://rt-hierarchy.github.io/
对应paper为:https://arxiv.org/pdf/2403.01823.pdf - ..

