
- 1CSS字体样式属性调试_"cssstyle(\"font-size:20px\")"
- 2浅谈最广泛应用的金融风控算法-评分卡_xgboost, iv, woe
- 3Android Studio如何通过结合SQLite数据库实现简单的注册,登录功能。_android之利用sqlite实现登陆和注册
- 4使用HanLP进行分词和实体抽取_hanlp分词
- 5 Live回顾 | 氪信张伟:基于核心AI技术的银行信贷风控与反欺诈应用 ...
- 6B站【千锋】Linux云计算基础视频教程_650集完全入门 课堂笔记_千峰云计算笔记
- 7go mod tidy引入私有仓库包时报错terminal prompts disabled_go mod tidy could not read username for
- 8单片机毕设分享 基于单片机的智能盲人头盔系统 - 导盲杖 stm32_单片机 头盔
- 9【独家源码】ssm更美个人美妆穿搭分享微信小程序95827应对计算机毕业设计困难的解决方案_微信小程序 换装 源码
- 10网络安全与密码学--AES加密
自动驾驶常用传感器介绍_自动驾驶 传感器
赞
踩
自动驾驶常用传感器介绍
一、摄像头
1. 概述
摄像头是自动驾驶核心传感器,是实现自动驾驶众多规划、控制的基础,相比于激光雷达和毫米波雷达,最大的优势在于可以识别车辆周边的环境信息和纹理信息,能够“看到”目标的类型、信号灯的颜色等,类似于人类的眼睛。
摄像头是将光学组件获得的光信号,投射到图像传感器上,完成由光信号到电信号的转换,然后再转换为数字图像信号,最后进行信号的算法处理。基于图像数据从而实现感知车辆周边路况的功能,实现如车辆、行人、车道线、交通标识物的检测、距离估计等模块。
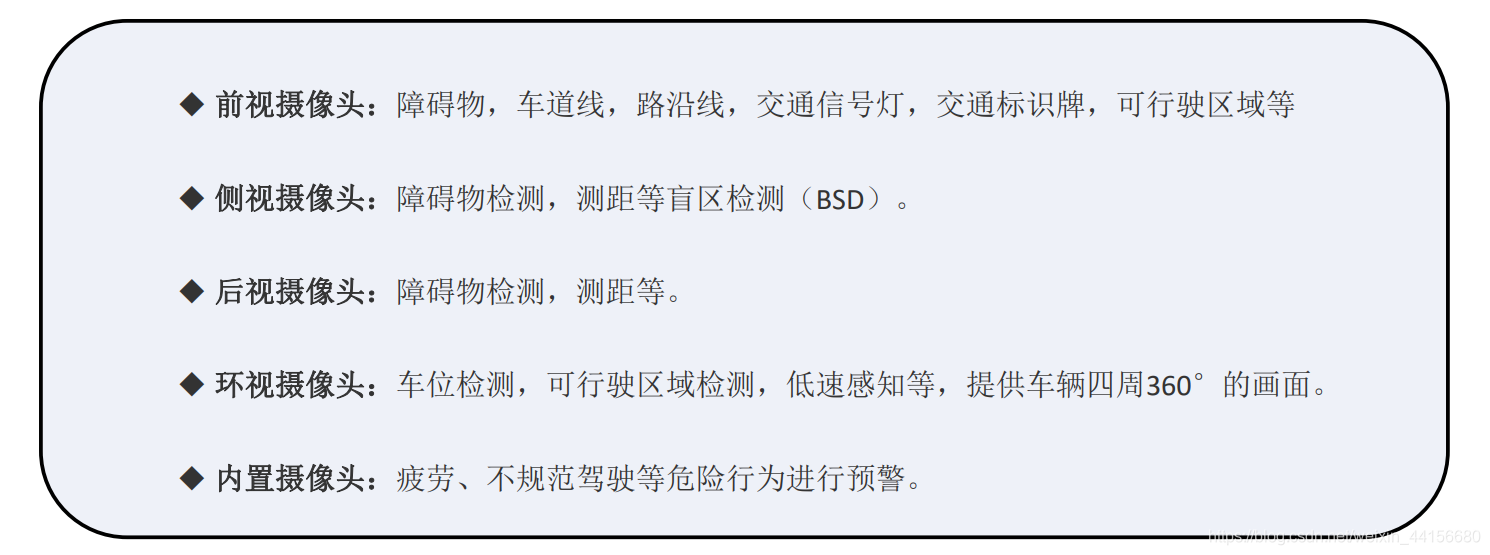
2. 摄像头在自动驾驶中的应用
根据摄像头的安装位置,可以分为前视、侧视、后视、内置、环视等。在高级别自动驾驶车辆上,配置的摄像头有多个甚至十多个。如特斯拉Autopilot2.0硬件系统就包含8个摄像头。
3. 车规级摄像头性能要求
针对车规级的摄像头,因为车辆全天候全天时的运作,对光线、温度的变化都有较高的要求(如进出隧道等明暗反差过大的场合,北方冬天极寒场景等),且能够满足车辆震动的要求,所以要求自动驾驶中摄像头主要需要满足:
1)耐高温:车载摄像头需要在-40℃-85℃范围内都能够正常工作,且能够适应温度的剧烈变化;
2)抗震:车辆在路面行驶时会产生较强的震动,所以车载摄像头必须能抗各种强度的震动;
3)防水:车辆需要在全天候全天时工况下运行,就需要摄像头密封严实、满足在雨水中浸泡仍可正常使用;
4)使用寿命:车载摄像头的使用寿命至少 10 年;
5)高动态低噪点:车辆需要在全天候全工时状态下运行,摄像头面对的光线环境变化剧烈且频繁,所以要求摄像头的 CMOS 具有高动态性;在光线较暗时,能够有效的抑制噪点的产生;
6)对于某些特定功能的摄像头,如侧视摄像头、环视摄像头等,还需要水平视场角比较广。
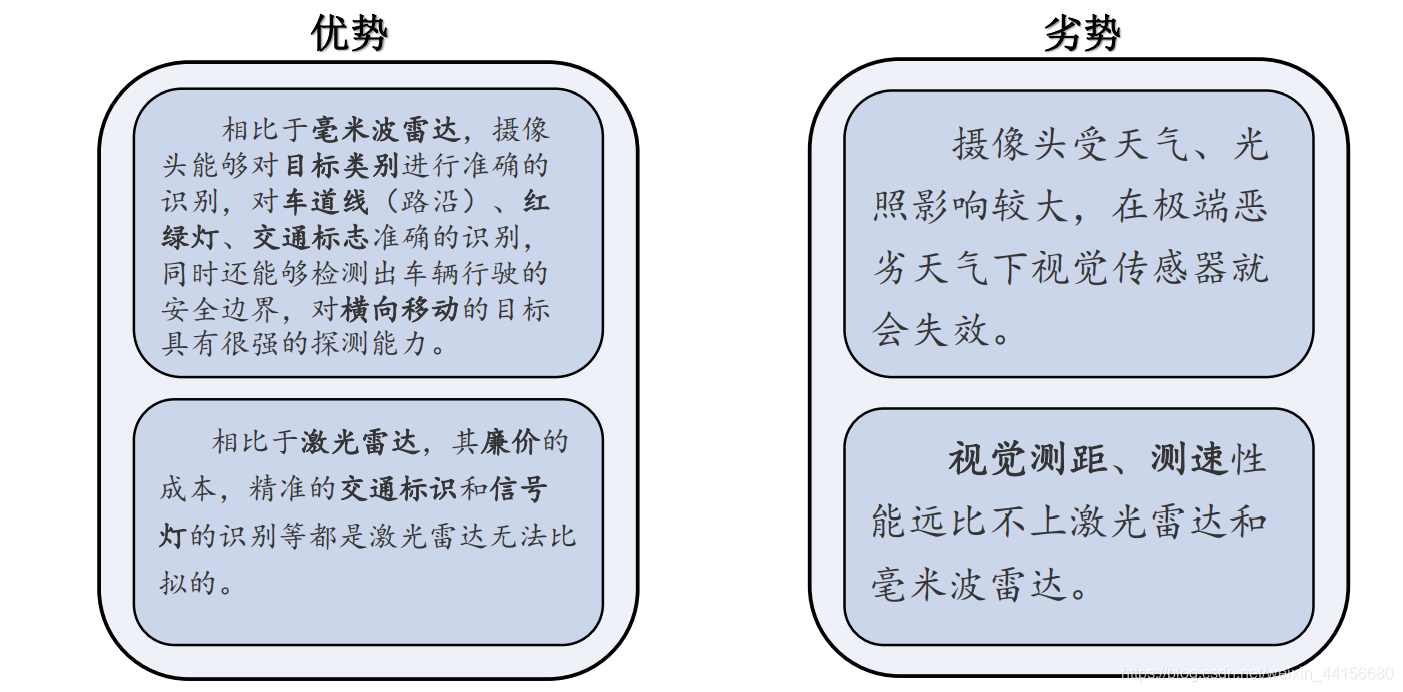
4. 摄像头的优劣势分析
5. 摄像头关键参数
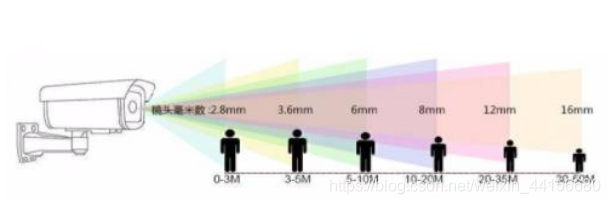
◆ 焦距:指平行光从透镜中心到光聚的焦点的距离,如4mm,6mm,12mm;
◆ 有效的探测距离:如近距,中距,远距等对应不同探测距离需求;
◆ 视场角:水平视场角(HFOV)和垂直视场角(VFOV),一般来说,焦距越小,视场角越大(如下图所示);
◆ 分辨率大小:200W(1920x1080),500W(2560x2048),800W(3200x2400);
◆ 最低照度:CMOS对环境光线的敏感程度;
◆ 信噪比:输出的信号电压和噪声电压的比值;
◆ 动态范围:正常显示细节的最亮和最暗物体的亮度值所包含的那个区间;
二、激光雷达
1. 概述
激光雷达(Lidar),全称 Laser Detecting and Ranging,即激光探测和测距,是一种用于精确获得三维位置信息的传感器,可以确定目标的位置、大小、外部轮廓等。与毫米波雷达工作原理相似,激光雷达通过发射和接收激光束,获取空间的位置点信息(即点云),并根据这些信息进行三维建模。
除了获取位置信息外,激光信号的反射率还可以区分目标物质的不同材质,激光雷达的线束越多,其测量精度越高。由于激光的频率高,波长短,可以获得极高的角度、距离和速度分辨率,这就意味着可以利用多普勒成像技术,构建出清晰的 3D 图像。
2. 工作原理
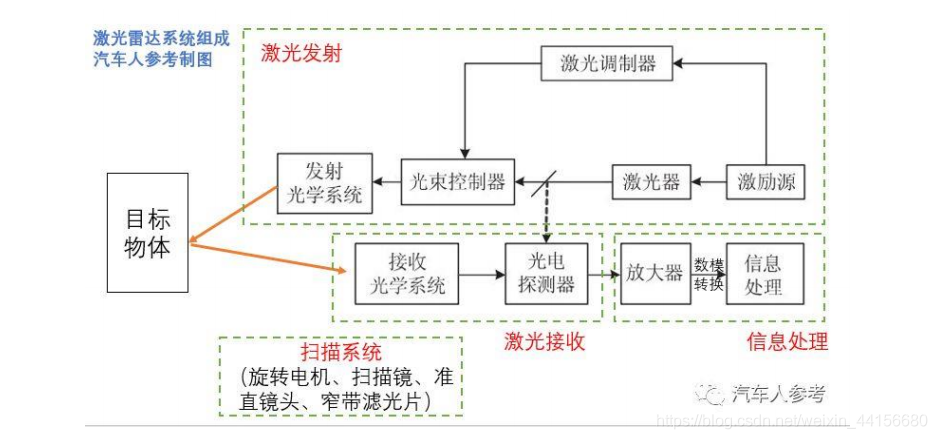
激光雷达一般包括发射系统、接收系统、信息处理三大部分组成,部分激光还包括扫描系统。
激光雷达是向目标发射激光探测信号束,然后将收到的从目标反射回来的信号(目标回波)与发射信号进行比较,测量发射信号与接收信号地时间差或者相位差,获得目标的距离信息,然后通过水平旋转扫描来测量角度,建立二维极坐标系,然后通过不同的俯仰角度信息,获得目标的高度信息等,从而完成对目标的探测、跟踪、识别。下图可以反映出激光雷达的组成:
激光雷达的测距有两种,一种是基于时间的测量方法,也叫飞行时间法(TOF),另一种是不基于时间的测距法。基于时间的测量方法又分为脉冲法和三角法两种。
脉冲法,也称为直接法,数学模型如下:距离 = 光速 * 往返时间 / 2;
三角法,也叫间接法,如下图:
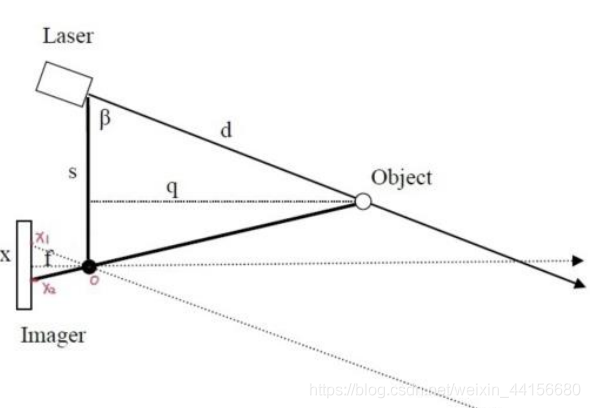
激光雷达发射器发射激光,经过物体(object)反射后被 Imager 捕捉,假设捕捉点为
x
2
x_2
x2,通过焦点 O 作一条虚线平行于入射光线,与 Imager 交于
x
1
x_1
x1,由于图中β已知,所以可以得到
x
1
x_1
x1的位置。假设
x
1
x_1
x1与
x
2
x_2
x2之间的距离为
x
x
x,可以得到左右两个三角形相似,所以有:
q
f
=
s
x
\frac {q} {f}=\frac {s} {x}
fq=xs,又因为
s
i
n
β
=
q
d
sin \beta=\frac {q} {d}
sinβ=dq,所以有
d
=
s
f
x
s
i
n
β
d=\frac {sf} {xsin\beta}
d=xsinβsf,这就得到了物体到激光的距离声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop】
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

