
- 1面试ssss
- 2FPGA时序分析与约束(4)——时序分析,时序约束,时序收敛_时序约束和时序收敛
- 3Relu激活函数
- 4使用ELK进行业务数据分析和可视化_elk可以做数据可视化大屏吗?
- 5在消费级GPU调试LLM的三种方法:梯度检查点,LoRA和量化_automodelforcausallm.from_pretrained device_map
- 6查看SecureCRT保存的密码_securecrt密码保存在那里
- 7ChatGPT深度科研应用、数据分析及机器学习、AI绘图与高效论文撰写教程_chatgpt论文分析的gpts
- 8nn.BCEWithLogitsLoss中weight参数和pos_weight参数的作用及用法_bcewithlogitsloss pos_weight
- 9了解@Builder看了这篇文章就够了_@builder.default
- 10Composer详细使用及利用Composer在Github和Packagist库中发布项目_composer github
西门子PLC S7-1200程序实例,西门子1200与安川机器人TCP IP通讯_安川机械手与外部plc通讯
赞
踩
西门子PLC S7-1200程序实例,博图版本V15
1,西门子1200与安川机器人TCP IP通讯,包含机器人GSD文件;
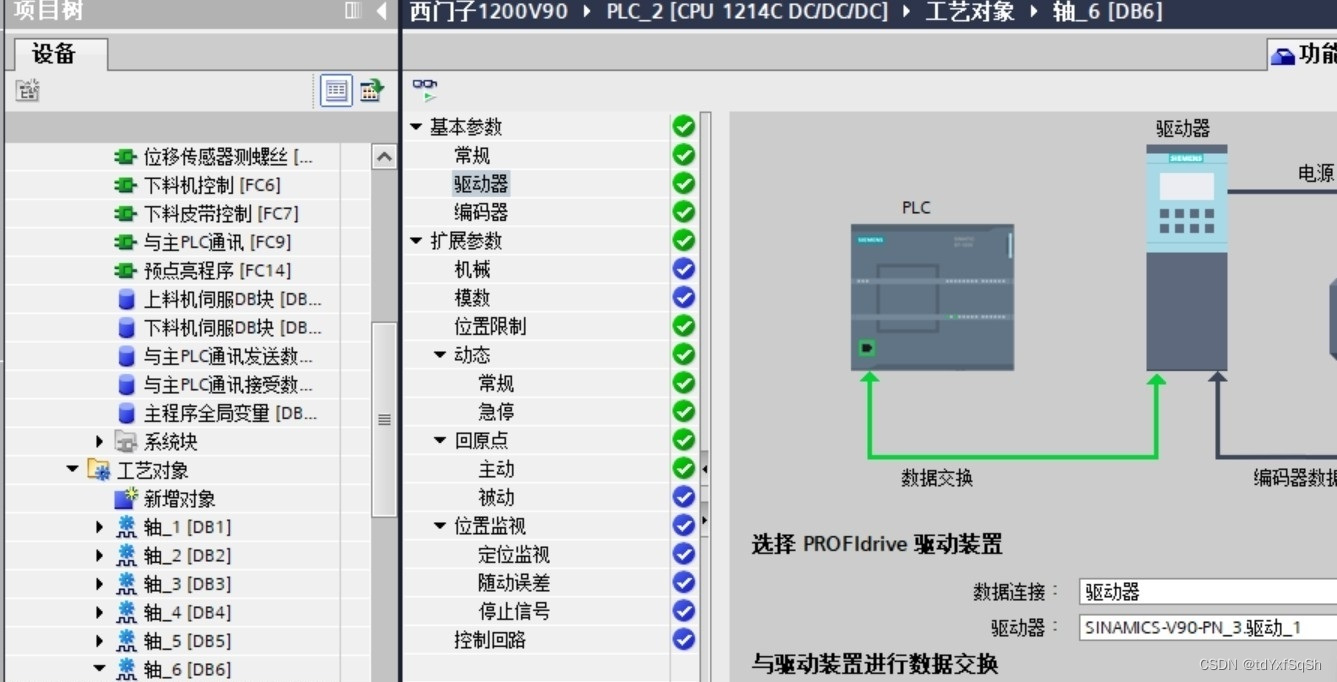
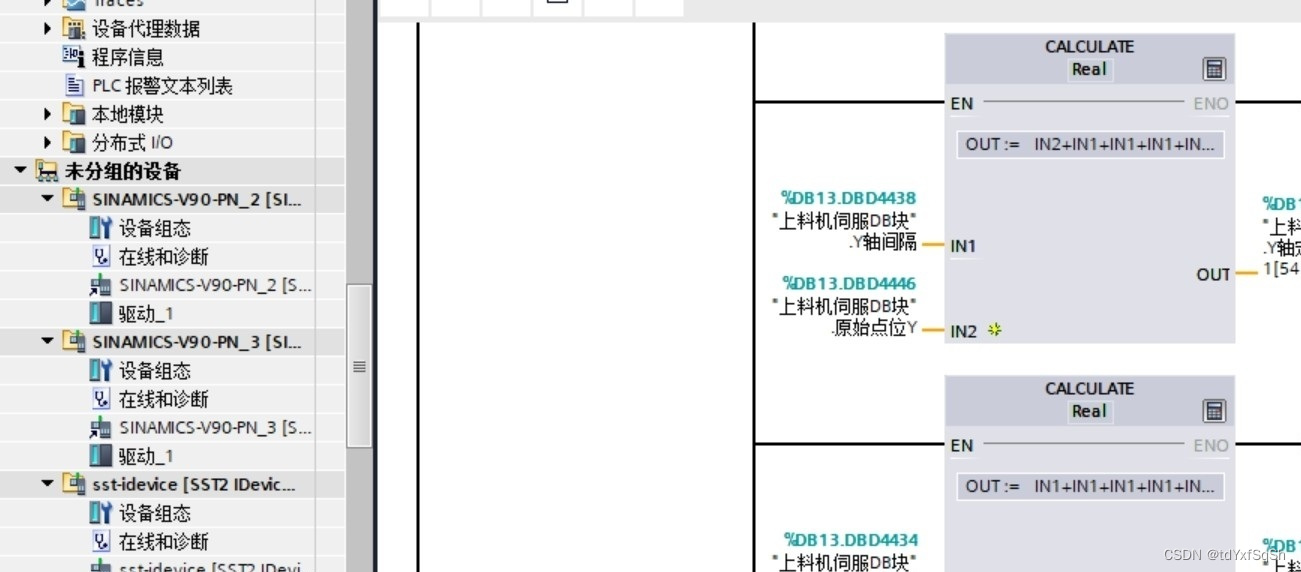
2,西门子1200控制6轴伺服电机,四台台脉冲控制台达B2伺服,两台PN通讯控制西门子V90伺服电机;
3,两台西门子1200开放式通讯交互数据联动;
4,与4台位移传感器modbus485轮询读取参数;
5,本程序为本人自己编写,仅用于学习探讨。


西门子PLC S7-1200程序实例,博图版本V15,仅供电气编程者学习借鉴,如有需要也可帮忙代写程序
随着工业自动化技术的不断发展,西门子PLC S7-1200成为了众多工程师最为青睐的控制器之一。本文将介绍一些典型的技术场景,展示了如何通过西门子PLC S7-1200与安川机器人进行TCP/IP通讯,并提供了机器人GSD文件以供使用。
首先,我们要了解如何实现PLC和安川机器人的通讯。在本示例中,我们通过TCP/IP协议进行通讯。PLC作为客户端,机器人作为服务器。通过使用西门子PLC S7-1200的内置通讯模块,我们可以轻松实现与机器人的通讯。为了正确配置通讯模块,我们需要安装机器人的GSD文件。GSD文件是安川机器人特有的文件,它包含了机器人的通讯参数和设备描述信息,可帮助PLC正确地与机器人进行通讯。
接下来,在实际应用中,我们可能需要控制多个伺服电机。在本示例中,我们使用西门子1200控制6轴伺服电机。其中,四台台脉冲控制台达B2伺服电机,两台通过PN通讯控制西门子V90伺服电机。通过PLC S7-1200控制器的高性能和灵活性,我们可以轻松地实现对这些伺服电机的控制和监控。
此外,如果我们需要多个PLC之间共享数据,我们可以使用西门子1200的开放式通讯功能。通过开放式通讯,我们可以实现多个PLC之间的数据交互和联动。例如,我们可以将一个PLC作为主站,其他PLC作为从站,通过设定合适的通讯协议和参数,实现数据的共享和协同操作。
在实际应用中,传感器的使用也是非常常见的。在本示例中,我们使用了4台位移传感器,并通过modbus485协议对其进行轮询读取参数。通过PLC S7-1200的通讯模块,我们可以方便地实现与传感器的通讯,并获取传感器所测量的参数值。
需要注意的是,本程序是作者自行编写的,仅供学习和探讨使用。在实际工程中,我们需要根据具体的应用需求进行相关的定制和优化。
总结起来,通过本文的示例,我们展示了如何使用西门子PLC S7-1200实现与安川机器人的通讯、控制多轴伺服电机、多PLC之间的数据交互以及与位移传感器的通讯。这些技术应用场景都是在实际工程中非常常见的问题,并且通过PLC S7-1200的强大功能和灵活性,我们可以很好地解决这些问题。
希望以上内容对于读者在PLC S7-1200的应用中有所帮助,如果有任何问题或者需求,都可以留言交流。
相关代码,程序地址:http://lanzouw.top/667631164687.html

