
- 1C#中GDI+图形图像技术(Graphics类、Pen类、Brush类)
- 2自定义view的三种方式
- 3深入解析分布式数据库的 SQL 引擎优化_sql引擎
- 4【2024华为OD机试C卷】387、密码输入检测 | 机试真题+思路参考+代码解析(C语言、C++、Java、Py、JS) (最新抽中C卷)(本题100%)_密码输入检测华为od真题
- 5flink启动后web访问问题_flink启动后web页面打不开
- 6【k8s】K8S中的IP地址(Node IP、Pod IP、Cluster IP、External IP、Internal-IP)
- 7docker配置redis主从复制
- 8解决动画函数点击按钮后可能出现的Bug---动画越来越快的问题(方案)_animejs 点击按钮动画加快
- 9Python 微信群聊自动回复_python微信群聊自动回复
- 10(仿牛客社区项目)Java开发笔记8.4:项目总结及常见面试题_仿牛客论坛项目面试题
基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学)_3d飞机姿态显示
赞
踩
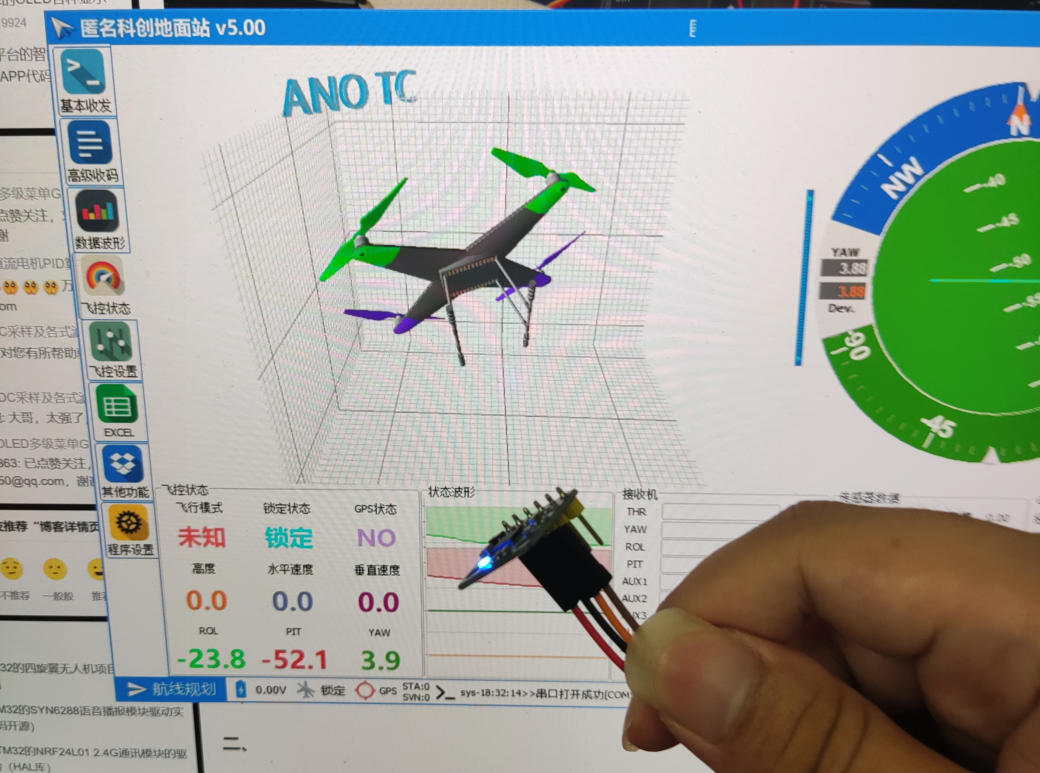
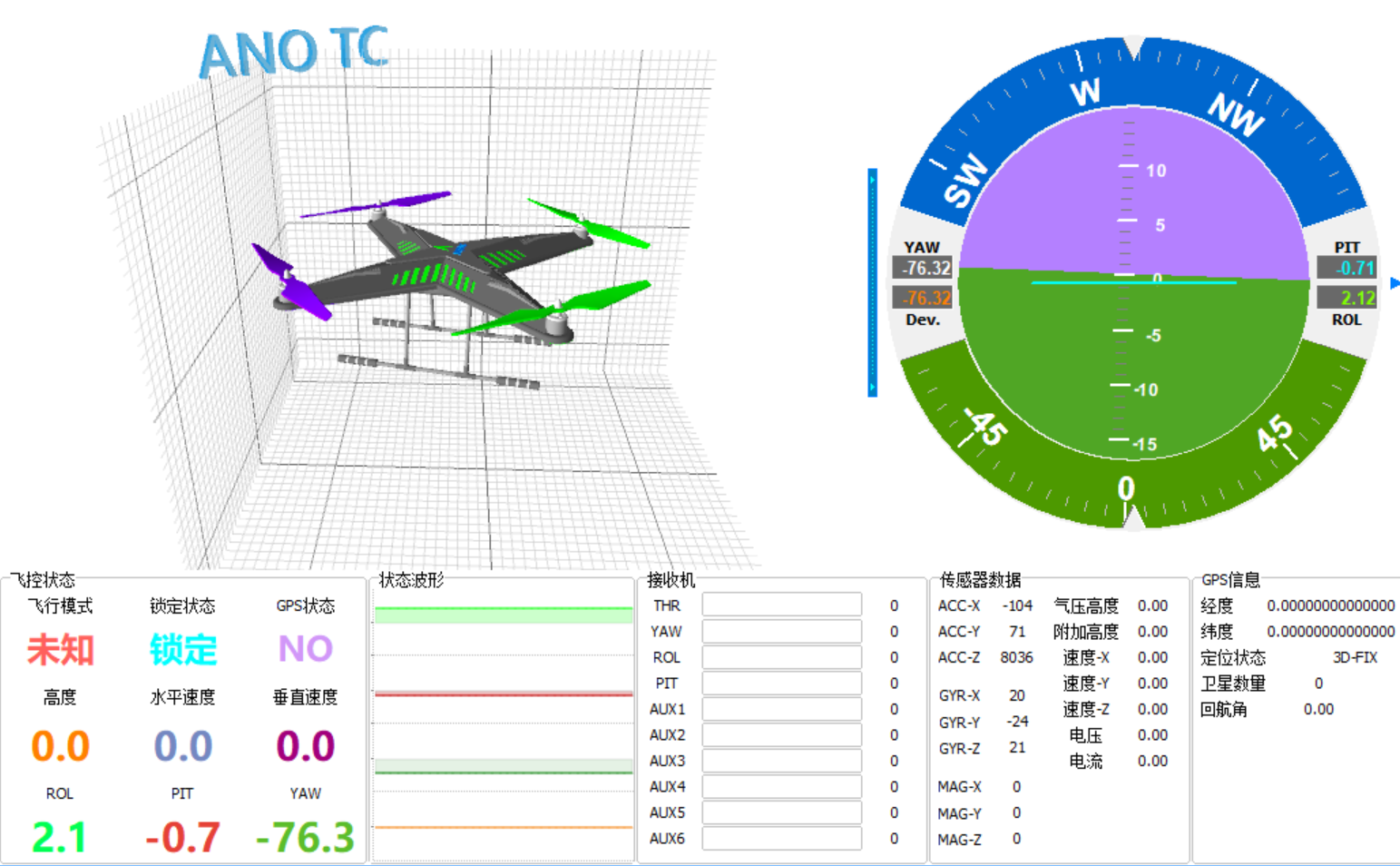
效果图:
一、飞行器姿态解算
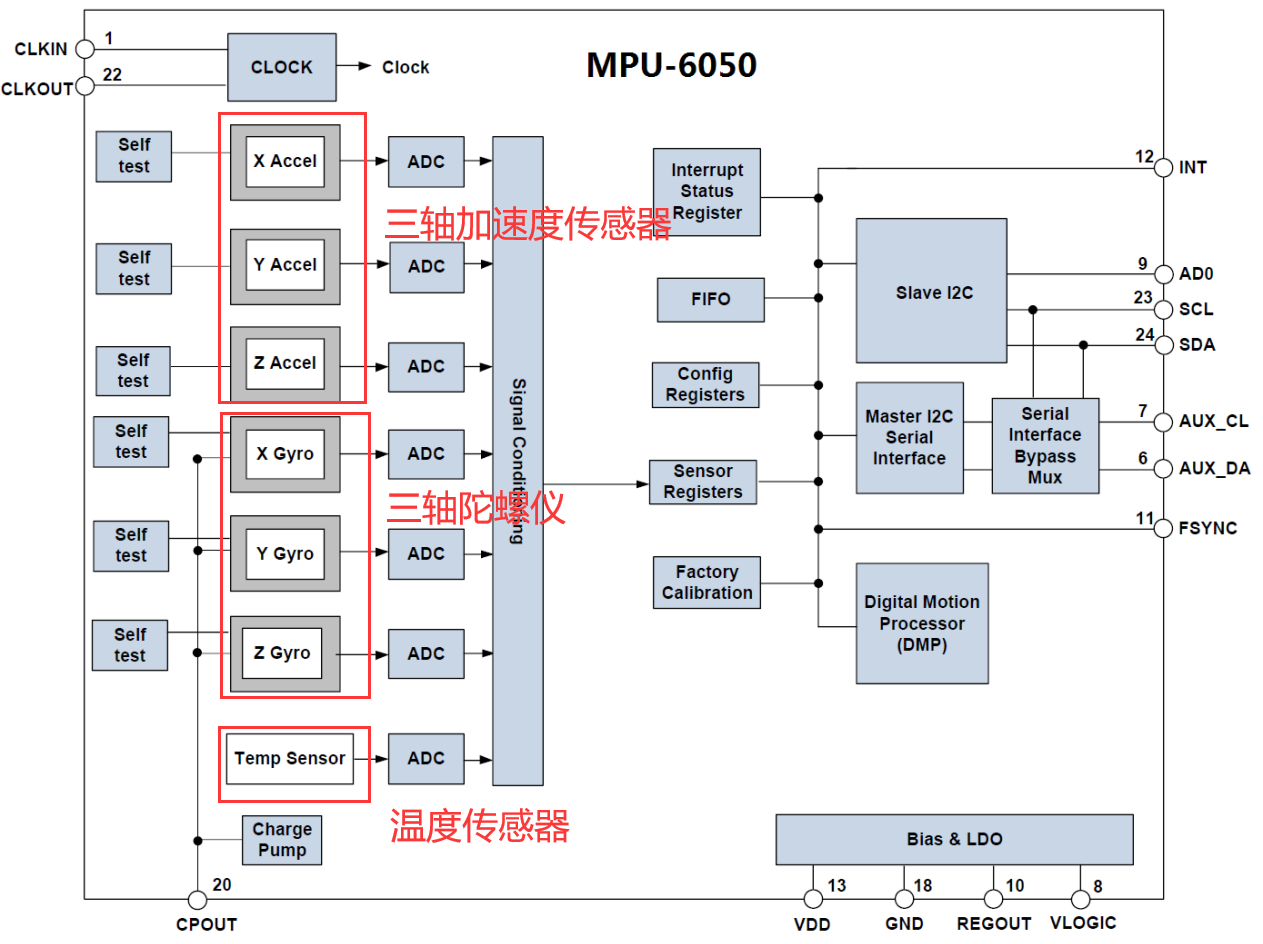
1.1 MPU6050概述
飞行器通常搭载一款姿态传感器(不管是六轴还是九轴姿态传感器),本项目中以最常见的 MPU6050 为例。MPU6050 传感器其实并不能直接输出我们飞行器飞行过程中的欧拉角(Euler-angles),通过读取它的传感器我们可以得到:3轴角速度+3轴角加速度。得到的角速度和角加速度信息我们是无法直接使用的,这个时候我们可以选择使用 DMP 去解算此时飞行器的欧拉角(Euler-angles)情况。当然,作者在项目中并没有使用 DMP 去解算飞行器的欧拉角(Euler-angles),而是使用了四元数解算的方法!
**DMP(Digital Motion Processor)**是一种数字运动处理器,它可以从MPU6050等传感器中读取数据,并进行解算以获取姿态信息。下面是DMP解算MPU6050的优缺点:
优点:
- DMP使用简单,可以直接套用官方库进行开发,无需自己编写解算算法。
- DMP不会占用太多的资源,因为它只需要读取传感器数据并进行简单的解算。
- DMP的输出数据经过处理,可以直接用于姿态控制等应用,无需再进行复杂的计算。
缺点:
- DMP的输出数据精度可能不够高,特别是在高精度传感场景下。
- DMP的输出数据不稳定,可能会受到噪声等因素的影响。
- DMP无法测量偏航角,只能获取滚动角和俯仰角的信息。
1.2 四元数姿态解算
本小节将以下方思维导图进行分析讲解:

初次接触的读者朋友可能对四元数较为陌生,这里作者建议大家直接去阅读秦永元的《惯性导航》,里面有非常好的讲解,大家可以直接看绪论和第九章就可以。
《惯性导航》PDF地址:惯性导航(第三版) (sciencereading.cn)")
下面我们根据思维导图用程序来一步一步实现如何求解欧拉角:
**1、**定义初始四元数的值为q0=1,q1=0,q2=0,q3=0。
**2、**读取加速度计值、角速度值,程序定义变量分别为ax、ay、az,gx、gy、gz,将陀螺仪值转为弧度,转换如下:
gx = gx * 0.0174f; //1度=0.0174弧度
gy = gy * 0.0174f;
gz = gz * 0.0174f;
- 1
- 2
- 3
**3、**对加速度值进行归一化
//提取等效旋转矩阵中的重力分量
Gravity.x = 2*(NumQ.q1 * NumQ.q3 - NumQ.q0 * NumQ.q2);
Gravity.y = 2*(NumQ.q0 * NumQ.q1 + NumQ.q2 * NumQ.q3);
Gravity.z = 1-2*(NumQ.q1 * NumQ.q1 + NumQ.q2 * NumQ.q2);
//加速度归一化
NormAcc = 1/sqrt(squa(MPU6050.accX)+ squa(MPU6050.accY) +squa(MPU6050.accZ));
//归一化计算
Acc.x = pMpu->accX * NormAcc;
Acc.y = pMpu->accY * NormAcc;
Acc.z = pMpu->accZ * NormAcc;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
**4、**提取姿态矩阵中的重力分量,我们已经得到数学计算公式为
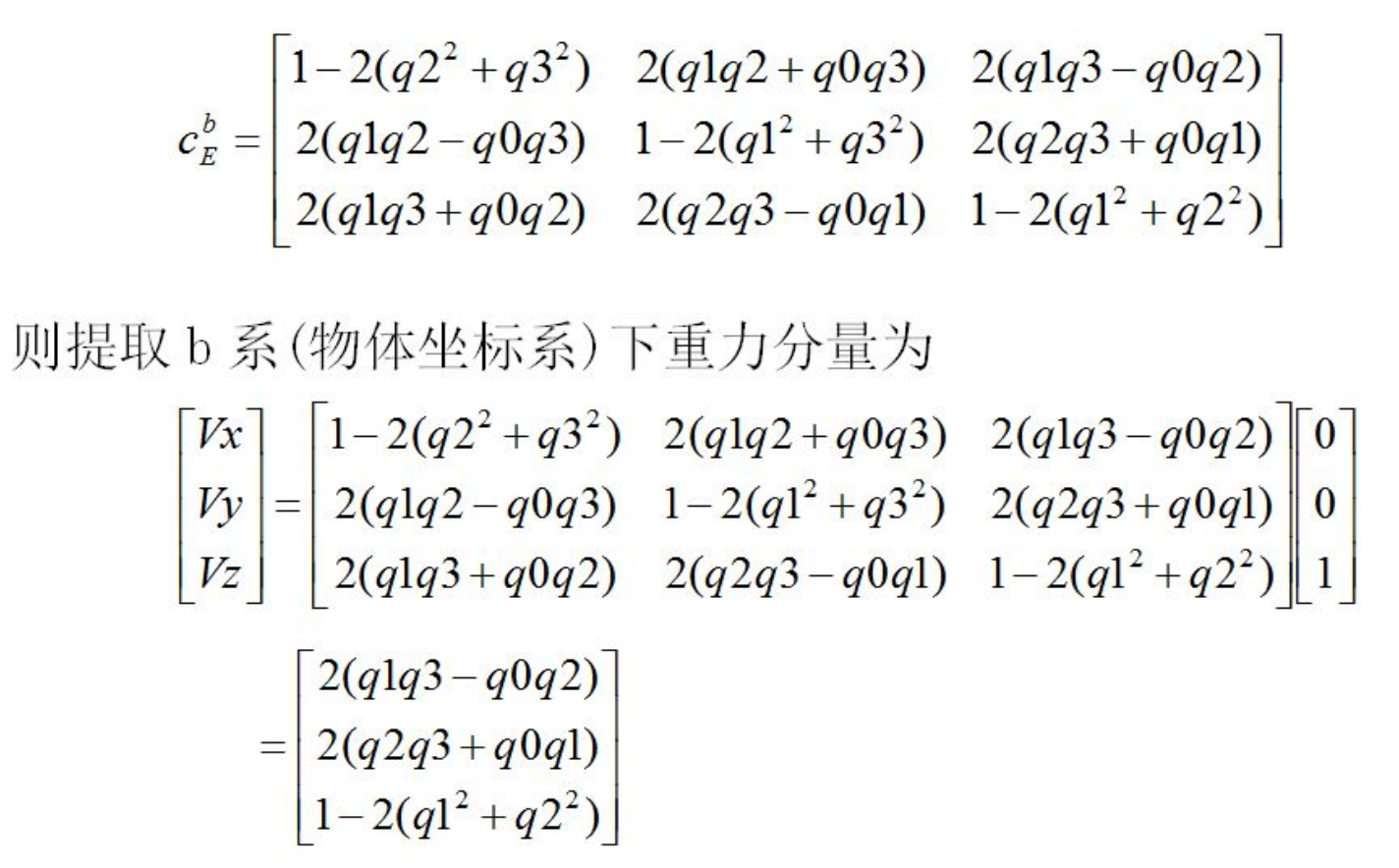
//提取等效旋转矩阵中的重力分量
Gravity.x = 2*(NumQ.q1 * NumQ.q3 - NumQ.q0 * NumQ.q2);
Gravity.y = 2*(NumQ.q0 * NumQ.q1 + NumQ.q2 * NumQ.q3);
Gravity.z = 1-2*(NumQ.q1 * NumQ.q1 + NumQ.q2 * NumQ.q2);
- 1
- 2
- 3
- 4
**5、**求姿态误差,对两向量进行叉乘(定义ex、ey、ez为三个轴误差元素),数学计算为:
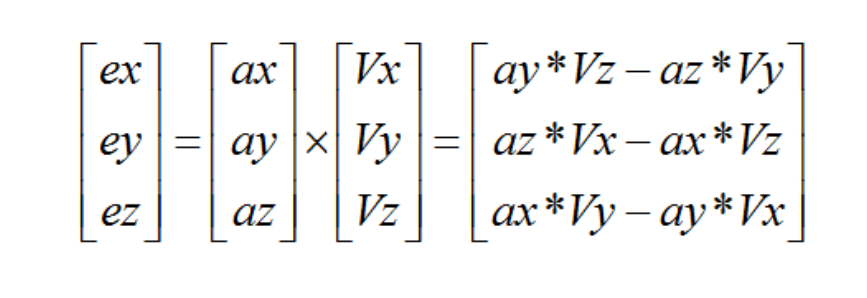
//向量差乘得出的值
AccGravity.x = (Acc.y * Gravity.z - Acc.z * Gravity.y);
AccGravity.y = (Acc.z * Gravity.x - Acc.x * Gravity.z);
AccGravity.z = (Acc.x * Gravity.y - Acc.y * Gravity.x);
- 1
- 2
- 3
- 4
**6、**互补滤波,将误差输入PID控制器后与陀螺仪测得的角速度相加,修正角速度值,程序实现如下(Kp为互补滤波系数这里取Kp=0.5,实际值根据需要进行调整):

//角速度融合加速度积分补偿值
Gyro.x = pMpu->gyroX * Gyro_Gr + KpDef * AccGravity.x + GyroIntegError.x;//弧度制
Gyro.y = pMpu->gyroY * Gyro_Gr + KpDef * AccGravity.y + GyroIntegError.y;
Gyro.z = pMpu->gyroZ * Gyro_Gr + KpDef * AccGravity.z + GyroIntegError.z;
- 1
- 2
- 3
- 4
**7、**解四元数微分方程,其数学计算如下(初始值q0 = 1,q1 = 0,q2 = 0,q3 = 0,为角速度,
为周期时间)

// 一阶龙格库塔法, 更新四元数
q0_t = (-NumQ.q1*Gyro.x - NumQ.q2*Gyro.y - NumQ.q3*Gyro.z) * HalfTime;
q1_t = ( NumQ.q0*Gyro.x - NumQ.q3*Gyro.y + NumQ.q2*Gyro.z) * HalfTime;
q2_t = ( NumQ.q3*Gyro.x + NumQ.q0*Gyro.y - NumQ.q1*Gyro.z) * HalfTime;
q3_t = (-NumQ.q2*Gyro.x + NumQ.q1*Gyro.y + NumQ.q0*Gyro.z) * HalfTime;
NumQ.q0 += q0_t;
NumQ.q1 += q1_t;
NumQ.q2 += q2_t;
NumQ.q3 += q3_t;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
**8、**四元数归一化,归一化方法与加速度归一化方法一样;
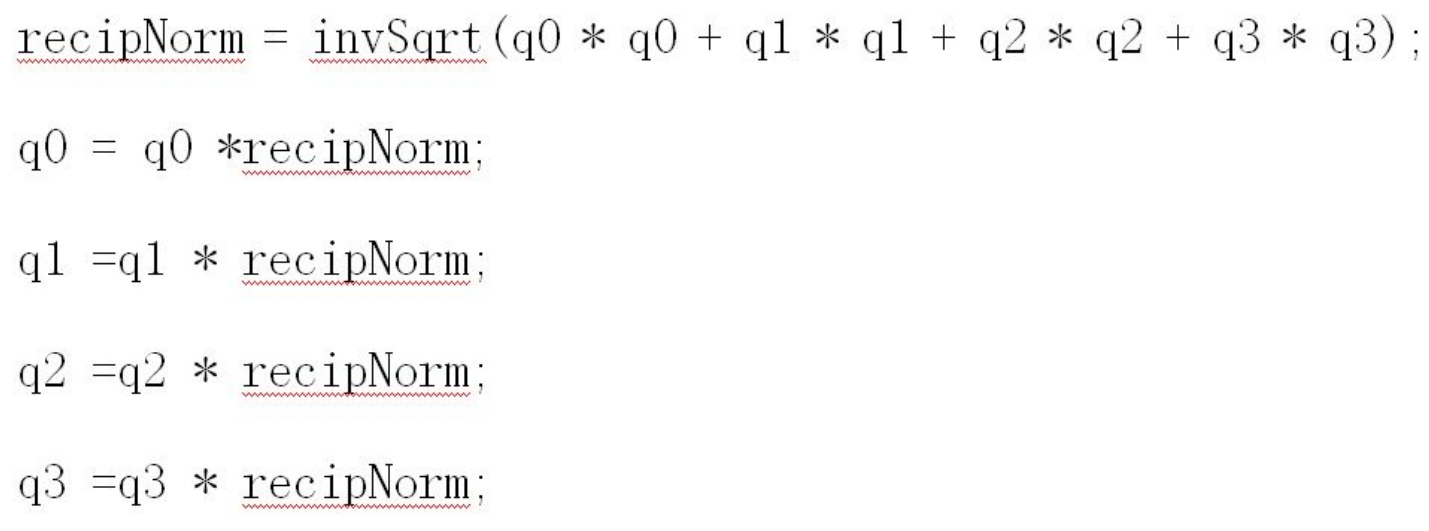
// 四元数归一化
NormQuat = 1/sqrt(squa(NumQ.q0) + squa(NumQ.q1) + squa(NumQ.q2) + squa(NumQ.q3));
NumQ.q0 *= NormQuat;
NumQ.q1 *= NormQuat;
NumQ.q2 *= NormQuat;
NumQ.q3 *= NormQuat;
- 1
- 2
- 3
- 4
- 5
- 6
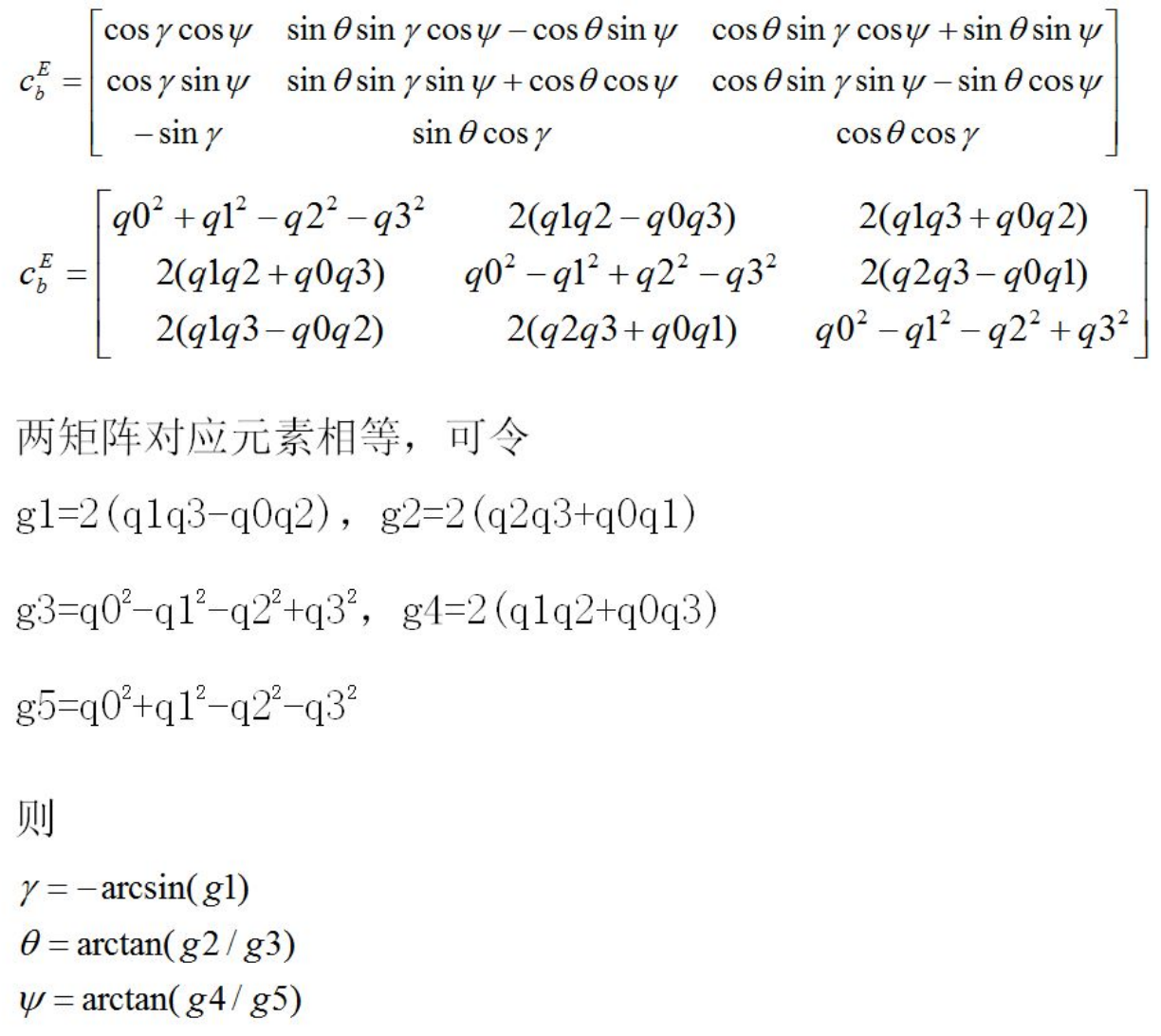
**9、**计算姿态角,数学公式为:
#ifdef YAW_GYRO
*(
float *)pAngE = atan2f(2 * NumQ.q1 *NumQ.q2 + 2 * NumQ.q0 * NumQ.q3, 1 - 2 * NumQ.q2 *NumQ.q2 - 2 * NumQ.q3 * NumQ.q3) * RtA; //yaw
#else
float yaw_G = pMpu->gyroZ * Gyro_G;
if((yaw_G > 1.0f) || (yaw_G < -1.0f)) //数据太小可以认为是干扰,不是偏航动作
{
pAngE->yaw += yaw_G * dt;
}
#endif
pAngE->pitch = asin(2 * NumQ.q0 *NumQ.q2 - 2 * NumQ.q1 * NumQ.q3) * RtA;
pAngE->roll = atan2(2 * NumQ.q2 *NumQ.q3 + 2 * NumQ.q0 * NumQ.q1, 1 - 2 * NumQ.q1 *NumQ.q1 - 2 * NumQ.q2 * NumQ.q2) * RtA; //PITCH
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
二、卡尔曼滤波详解
卡尔曼的本质:递归式最优评估。
卡尔曼的好处是:①效率最高甚至是最有用的,在系统中能够快速的消除高速白噪声;②不会产生严重滞后;③所需数据存储量较小,便于进行实时处理;
在飞行器中卡尔曼滤波的高效率性是十分优秀的,但是卡尔曼不能抵抗突变干扰,这点在飞行器中一般不会出现数据突变跳变,所以卡尔曼很适合运用于四轴飞行器。
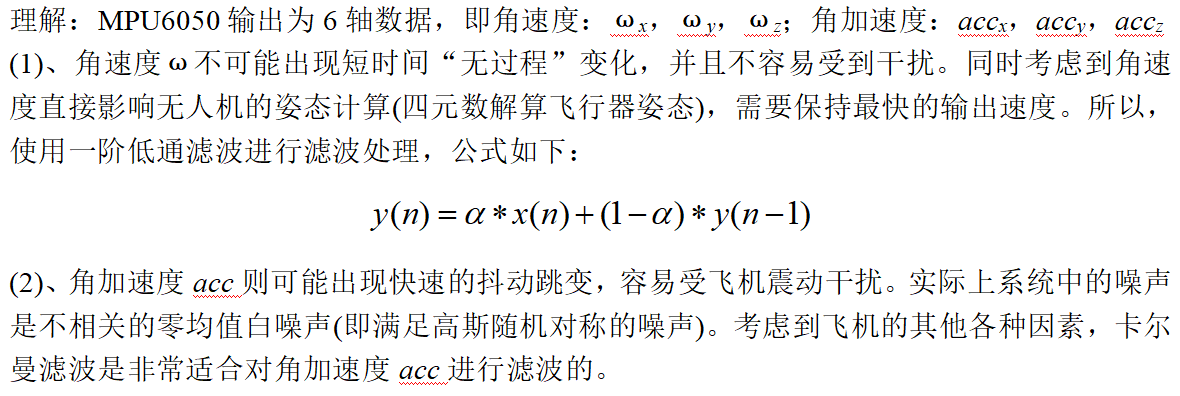
飞行器项目中卡尔曼滤波的目标对象是加速度,三轴加速度都是独立变量,可以分别独立用一维线性卡尔曼进行滤波。由于加速度容易受震动干扰,它就是一个很典型的高频高斯白噪声(噪声随机,对称,符合高斯分布的噪声),所以加速度用卡尔曼滤波。
角速度不容易受到干扰,就用简单的一阶低通互补滤波。
飞控中的滤波算法:角加速度(卡尔曼滤波);角速度(一阶互补滤波);

将上述数学公式代码化后可以得到卡尔曼滤波代码:
#include "kalman.h"
//一维卡尔曼滤波
void kalmanfiter(struct KalmanFilter *EKF,float input)
{
EKF->NewP = EKF->LastP + EKF->Q;
EKF->Kg = EKF->NewP / (EKF->NewP + EKF->R);
EKF->Out = EKF->Out + EKF->Kg * (input - EKF->Out);
EKF->LastP = (1 - EKF->Kg) * EKF->NewP;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
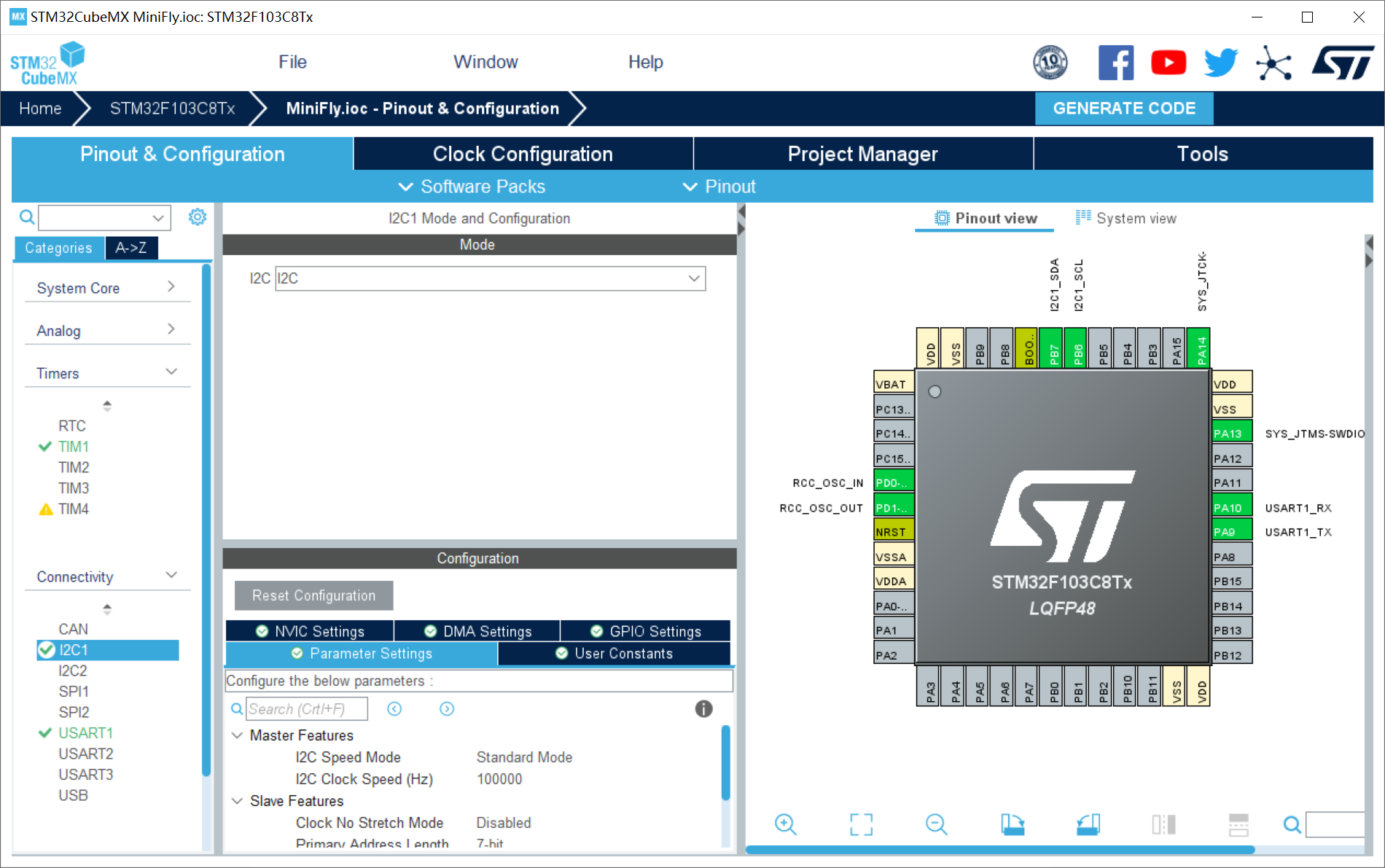
三、CubeMX配置
1、RCC配置外部高速晶振(精度更高)——HSE;
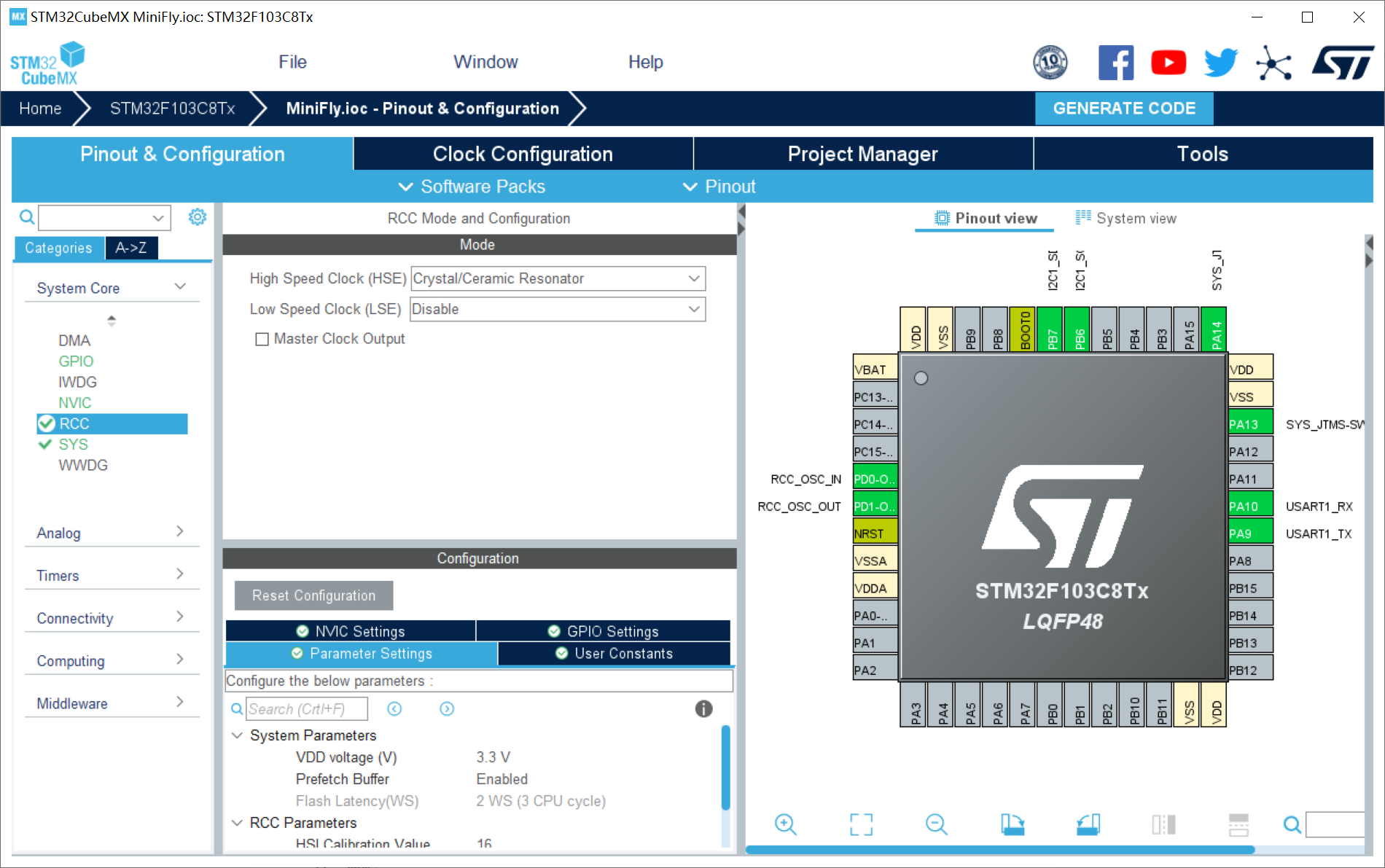
2、SYS配置:Debug设置成Serial Wire(否则可能导致芯片自锁);

3、TIM1配置:在TIM1的中断回调函数中发生MPU6050姿态解算与控制都是,中断周期:3ms;

4、I2C1配置:配置MCU与MPU6050之间的通讯协议;
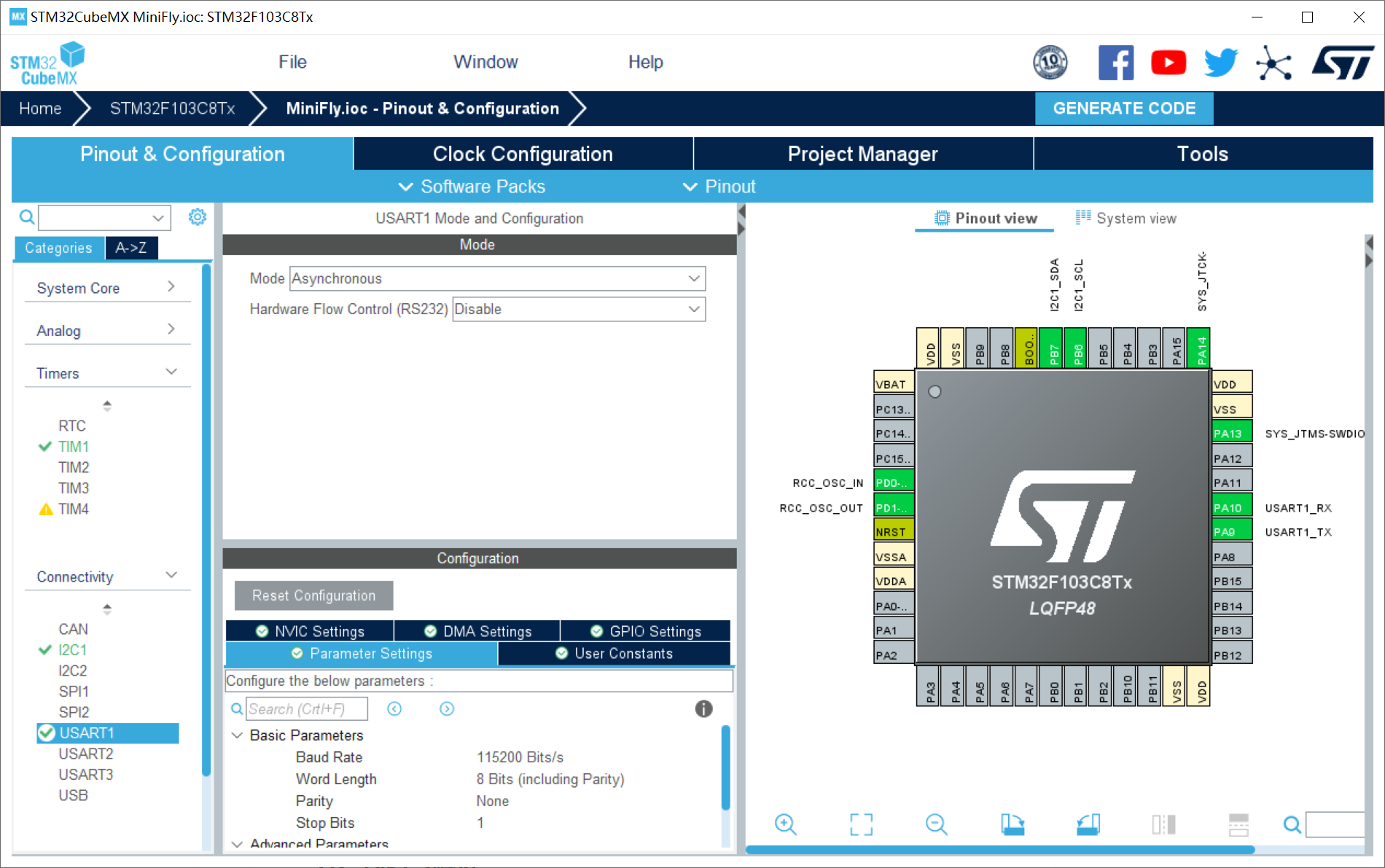
5、UART配置:通过UART1与匿名上位机进行通讯,显示飞行器3D姿态;
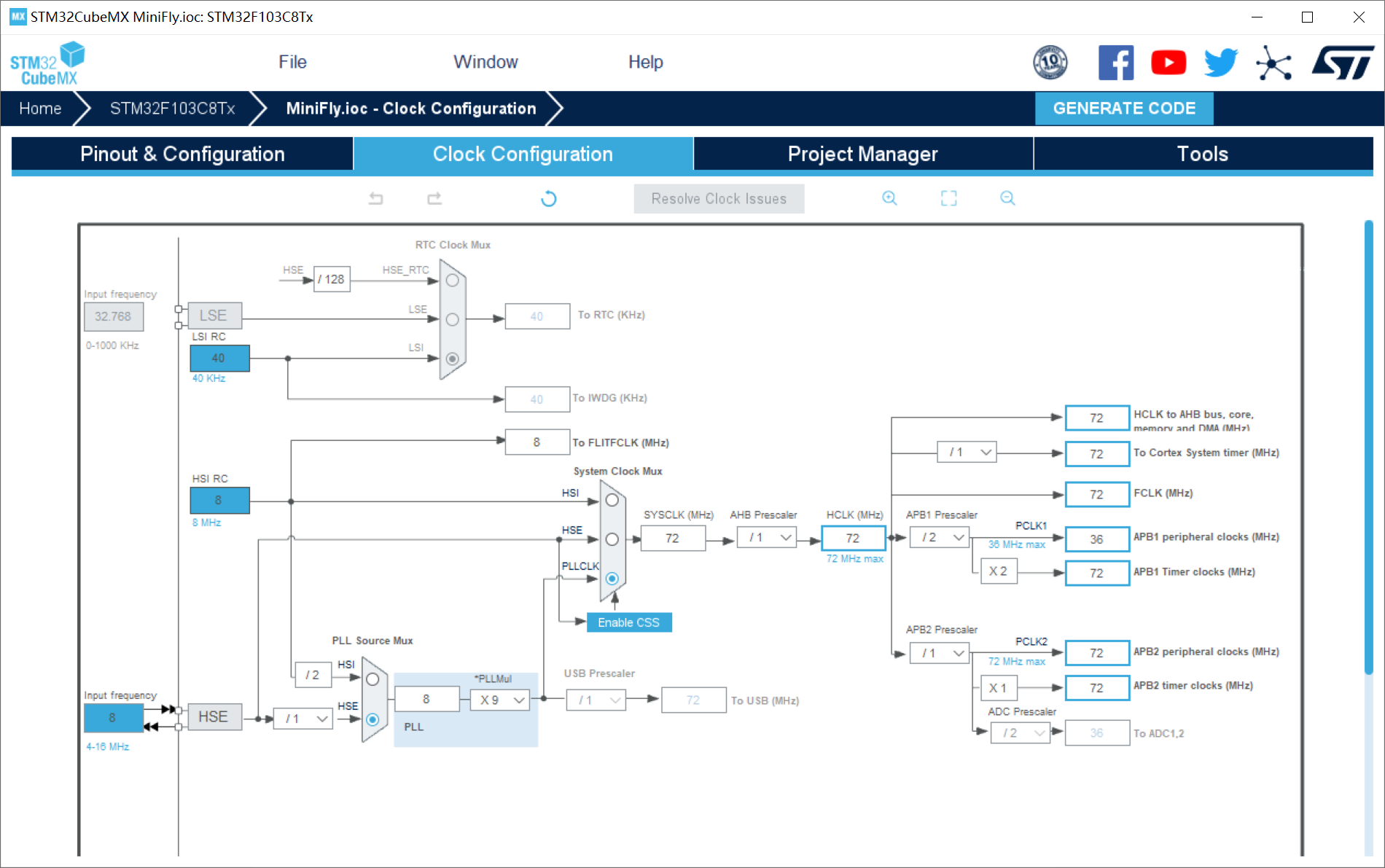
6、时钟树配置
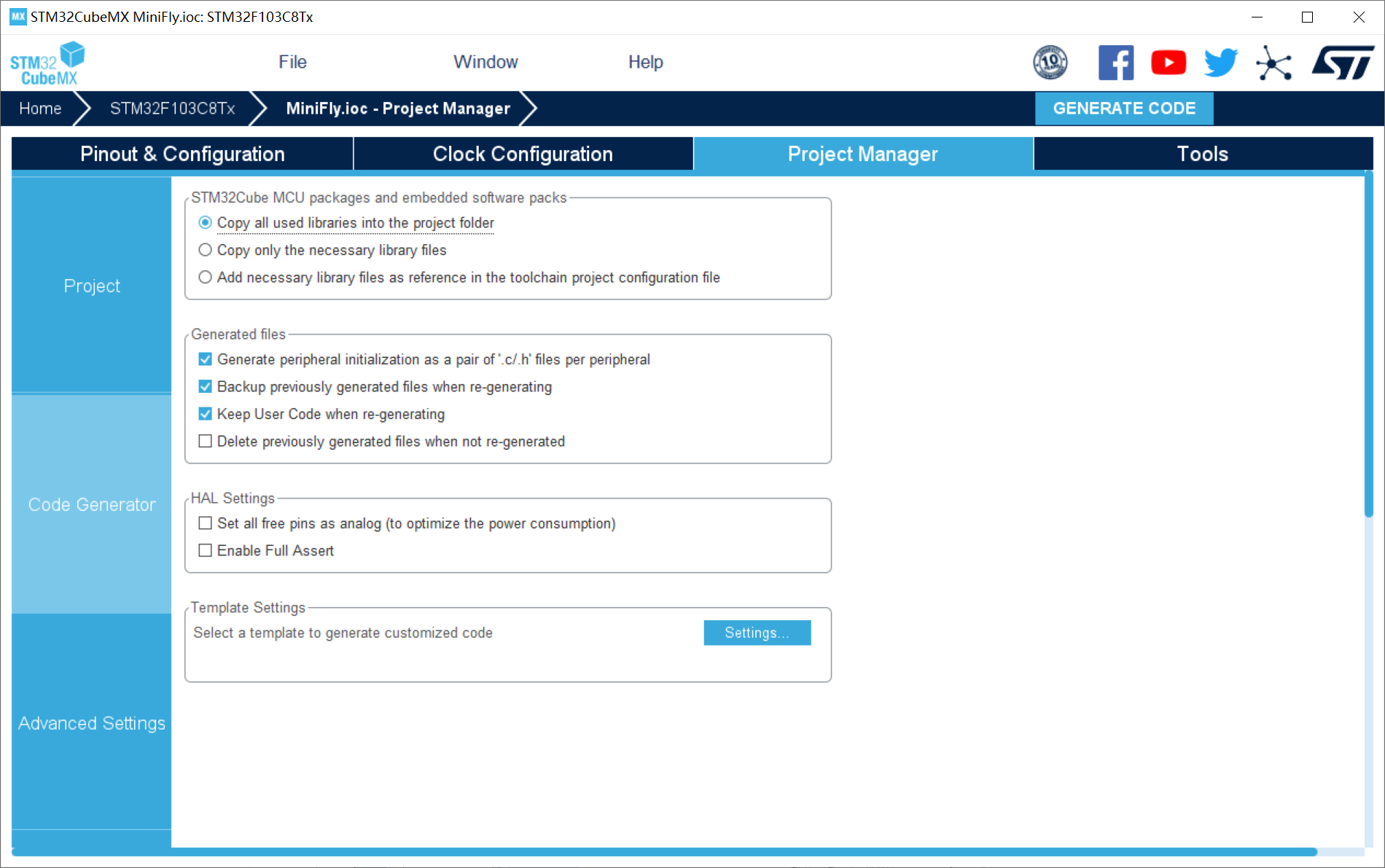
7、工程配置
四、代码与解析
4.1 MPU6050代码
mpu6050.h代码:
mpu6050代码中核心是通过I2C通讯读取寄存器地址为:0X3B和 0x43的数值(分别为角加速度和角速度)。
#ifndef __MPU6050_H #define __MPU6050_H #include "stm32f1xx_hal.h"//用什么系列就是什么 //#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到 //#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到 #define MPU_SELF_TESTX_REG 0X0D //自检寄存器X #define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y #define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z #define MPU_SELF_TESTA_REG 0X10 //自检寄存器A #define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器 #define MPU_CFG_REG 0X1A //配置寄存器 #define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器 #define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器 #define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器 #define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器 #define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器 #define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器 #define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器 #define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器 #define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器 #define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器 #define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器 #define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器 #define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器 #define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器 #define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器 #define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器 #define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器 #define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器 #define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器 #define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器 #define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器 #define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器 #define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器 #define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器 #define MPU_INT_EN_REG 0X38 //中断使能寄存器 #define MPU_INT_STA_REG 0X3A //中断状态寄存器 #define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器 #define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器 #define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器 #define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器 #define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器 #define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器 #define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器 #define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器 #define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器 #define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器 #define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器 #define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器 #define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器 #define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器 #define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器 #define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器 #define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器 #define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器 #define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器 #define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器 #define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器 #define MPU_USER_CTRL_REG 0X6A //用户控制寄存器 #define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1 #define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2 #define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位 #define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位 #define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器 #define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器,who am i寄存器 //如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位). //如果接V3.3,则IIC地址为0X69(不包含最低位). #define MPU_ADDR 0X68 //因为MPU6050的AD0接GND,所以则读写地址分别为0XD1和0XD0 // (如果AD0接VCC,则读写地址分别为0XD3和0XD2) #define MPU_READ 0XD1 #define MPU_WRITE 0XD0 uint8_t MPU_Init(void); //初始化MPU6050 uint8_t MPU_Write_Len(uint8_t reg,uint8_t len,uint8_t *buf); //IIC连续写 uint8_t MPU_Read_Len(uint8_t reg,uint8_t len,uint8_t *buf); //IIC连续读 uint8_t MPU_Write_Byte(uint8_t reg,uint8_t data); //IIC写一个字节 uint8_t MPU_Read_Byte(uint8_t reg); //IIC读一个字节 uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr); uint8_t MPU_Set_Accel_Fsr(uint8_t fsr); uint8_t MPU_Set_LPF(uint16_t lpf); uint8_t MPU_Set_Rate(uint16_t rate); uint8_t MPU_Set_Fifo(uint8_t sens); float MPU_Get_Temperature(void); uint8_t MPU_Get_Gyroscope(short *gx,short *gy,short *gz); uint8_t MPU_Get_Accelerometer(short *ax,short *ay,short *az); void MpuGetData(void); #endif

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
mpu6050.c代码:
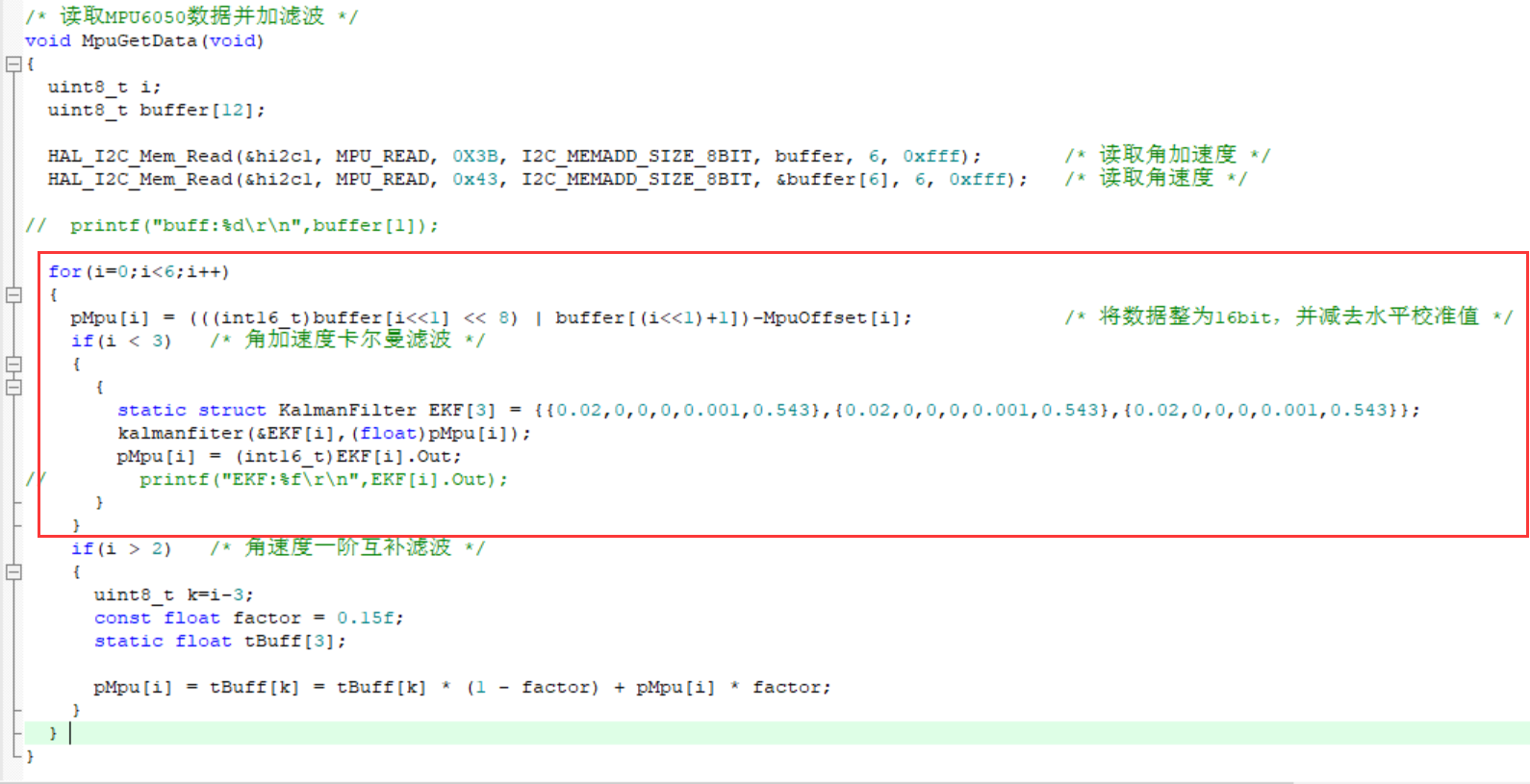
#include "mpu6050.h" #include "alldata.h" #include "kalman.h" #include "stdio.h" #include "i2c.h" static volatile int16_t *pMpu = (int16_t *)&MPU6050; int16_t MpuOffset[6] = {0}; //MPU6050补偿数值 //初始化MPU6050 //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Init(void) { uint8_t res; extern I2C_HandleTypeDef hi2c1; HAL_I2C_Init(&hi2c1); MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050 MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps MPU_Set_Accel_Fsr(0); //加速度传感器,±2g MPU_Set_Rate(50); //设置采样率50Hz MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断 MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭 MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效 res=MPU_Read_Byte(MPU_DEVICE_ID_REG); printf("\r\nMPU6050:0x%2x\r\n",res); if(res==MPU_ADDR)//器件ID正确 { MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考 MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作 MPU_Set_Rate(50); //设置采样率为50Hz }else return 1; return 0; } //设置MPU6050陀螺仪传感器满量程范围 //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr) { return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围 } //设置MPU6050加速度传感器满量程范围 //fsr:0,±2g;1,±4g;2,±8g;3,±16g //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Accel_Fsr(uint8_t fsr) { return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围 } //设置MPU6050的数字低通滤波器 //lpf:数字低通滤波频率(Hz) //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_LPF(uint16_t lpf) { uint8_t data=0; if(lpf>=188)data=1; else if(lpf>=98)data=2; else if(lpf>=42)data=3; else if(lpf>=20)data=4; else if(lpf>=10)data=5; else data=6; return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器 } //设置MPU6050的采样率(假定Fs=1KHz) //rate:4~1000(Hz) //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Rate(uint16_t rate) { uint8_t data; if(rate>1000)rate=1000; if(rate<4)rate=4; data=1000/rate-1; data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器 return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半 } //得到温度值 //返回值:温度值(扩大了100倍) float MPU_Get_Temperature(void) { unsigned char buf[2]; short raw; float temp; MPU_Read_Len(MPU_TEMP_OUTH_REG,2,buf); raw=(buf[0]<<8)| buf[1]; temp=(36.53+((double)raw)/340)*100; // temp = (long)((35 + (raw / 340)) * 65536L); return temp/100.0f; } //得到陀螺仪值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Get_Gyroscope(short *gx,short *gy,short *gz) { uint8_t buf[6],res; res=MPU_Read_Len(MPU_GYRO_XOUTH_REG,6,buf); if(res==0) { *gx=((uint16_t)buf[0]<<8)|buf[1]; *gy=((uint16_t)buf[2]<<8)|buf[3]; *gz=((uint16_t)buf[4]<<8)|buf[5]; } return res; } //得到加速度值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Get_Accelerometer(short *ax,short *ay,short *az) { uint8_t buf[6],res; res=MPU_Read_Len(MPU_ACCEL_XOUTH_REG,6,buf); if(res==0) { *ax=((uint16_t)buf[0]<<8)|buf[1]; *ay=((uint16_t)buf[2]<<8)|buf[3]; *az=((uint16_t)buf[4]<<8)|buf[5]; } return res;; } //IIC连续写 uint8_t MPU_Write_Len(uint8_t reg,uint8_t len,uint8_t *buf) { extern I2C_HandleTypeDef hi2c1; HAL_I2C_Mem_Write(&hi2c1, MPU_WRITE, reg, I2C_MEMADD_SIZE_8BIT, buf, len, 0xfff); HAL_Delay(100); return 0; } //IIC连续读 //addr:器件地址 //reg:要读取的寄存器地址 //len:要读取的长度 //buf:读取到的数据存储区 //返回值:0,正常 // 其他,错误代码 uint8_t MPU_Read_Len(uint8_t reg,uint8_t len,uint8_t *buf) { extern I2C_HandleTypeDef hi2c1; HAL_I2C_Mem_Read(&hi2c1, MPU_READ, reg, I2C_MEMADD_SIZE_8BIT, buf, len, 0xfff); HAL_Delay(100); return 0; } //IIC写一个字节 //reg:寄存器地址 //data:数据 //返回值:0,正常 // 其他,错误代码 uint8_t MPU_Write_Byte(uint8_t reg,uint8_t data) { extern I2C_HandleTypeDef hi2c1; unsigned char W_Data=0; W_Data = data; HAL_I2C_Mem_Write(&hi2c1, MPU_WRITE, reg, I2C_MEMADD_SIZE_8BIT, &W_Data, 1, 0xfff); HAL_Delay(100); return 0; } //IIC读一个字节 //reg:寄存器地址 //返回值:读到的数据 uint8_t MPU_Read_Byte(uint8_t reg) { extern I2C_HandleTypeDef hi2c1; unsigned char R_Data=0; HAL_I2C_Mem_Read(&hi2c1, MPU_READ, reg, I2C_MEMADD_SIZE_8BIT, &R_Data, 1, 0xfff); HAL_Delay(100); return R_Data; } /* 读取MPU6050数据并加滤波 */ void MpuGetData(void) { uint8_t i; uint8_t buffer[12]; HAL_I2C_Mem_Read(&hi2c1, MPU_READ, 0X3B, I2C_MEMADD_SIZE_8BIT, buffer, 6, 0xfff); /* 读取角加速度 */ HAL_I2C_Mem_Read(&hi2c1, MPU_READ, 0x43, I2C_MEMADD_SIZE_8BIT, &buffer[6], 6, 0xfff); /* 读取角速度 */ for(i=0;i<6;i++) { pMpu[i] = (((int16_t)buffer[i<<1] << 8) | buffer[(i<<1)+1])-MpuOffset[i]; /* 将数据整为16bit,并减去水平校准值 */ if(i < 3) /* 角加速度卡尔曼滤波 */ { { static struct KalmanFilter EKF[3] = {{0.02,0,0,0,0.001,0.543},{0.02,0,0,0,0.001,0.543},{0.02,0,0,0,0.001,0.543}}; kalmanfiter(&EKF[i],(float)pMpu[i]); pMpu[i] = (int16_t)EKF[i].Out; } } if(i > 2) /* 角速度一阶互补滤波 */ { uint8_t k=i-3; const float factor = 0.15f; static float tBuff[3]; pMpu[i] = tBuff[k] = tBuff[k] * (1 - factor) + pMpu[i] * factor; } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
4.2 Kalman和一阶互补滤波滤波代码
kalman.c:
#include "kalman.h"
//一维卡尔曼滤波
void kalmanfiter(struct KalmanFilter *EKF,float input)
{
EKF->NewP = EKF->LastP + EKF->Q;
EKF->Kg = EKF->NewP / (EKF->NewP + EKF->R);
EKF->Out = EKF->Out + EKF->Kg * (input - EKF->Out);
EKF->LastP = (1 - EKF->Kg) * EKF->NewP;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
一阶互补滤波:
if(i > 2) /* 角速度一阶互补滤波 */
{
uint8_t k=i-3;
const float factor = 0.15f; /* 互补滤波的影响因子 */
static float tBuff[3];
pMpu[i] = tBuff[k] = tBuff[k] * (1 - factor) + pMpu[i] * factor;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
以上 2 种滤波都存在 mpu6050.c 代码中进行调用:

最后
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Java工程师,想要提升技能,往往是自己摸索成长,自己不成体系的自学效果低效漫长且无助。
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!
如果你觉得这些内容对你有帮助,需要这份全套学习资料的朋友可以戳我获取!!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!
大厂,18年进入阿里一直到现在。**
深知大多数Java工程师,想要提升技能,往往是自己摸索成长,自己不成体系的自学效果低效漫长且无助。
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。
[外链图片转存中…(img-URqdiVeW-1715684978981)]
[外链图片转存中…(img-hpmV6Tg2-1715684978983)]
[外链图片转存中…(img-E53KuGXY-1715684978983)]
[外链图片转存中…(img-O2y9ZXBH-1715684978984)]
[外链图片转存中…(img-7rvYnnBo-1715684978985)]
[外链图片转存中…(img-3KAUCXFI-1715684978987)]
[外链图片转存中…(img-WVnxmC76-1715684978988)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!
如果你觉得这些内容对你有帮助,需要这份全套学习资料的朋友可以戳我获取!!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!

