
- 1elasticsearch——字段截取_elasticsearch截取字符串
- 2linux内核那些事之mmap_region流程梳理
- 3Stable Diffusion-安装(整合版)_stablediffusion整合包
- 4模拟速度控制器的基本结构_模拟控制器的基本构成
- 5k8s网络插件-flannel
- 6图片优化:延迟加载的实现原理及源码解析_shopify 延迟图片加载代码
- 7HarmonyOS应用开发者基础认证试题_harmonyos应用开发者基础认证题库
- 8联想服务器网卡型号怎么看,如何通过设备硬件ID判断无线网卡的品牌及型号
- 9部署 Express 应用_express部署
- 10Ubuntu18.04显卡检查和驱动安装_tegra pcie x8 endpoint
Autoware平台架构及设计_autoware github
赞
踩
官网:https://autoware.org/autoware-overview/
gitlab仓库:https://github.com/autowarefoundation/autoware
github仓库:https://github.com/autowarefoundation/autoware.universe
Autoware
Autoware 是一个自动驾驶开发平台,由Apex.AI 开发和维护。它是一个开放源代码的软件平台,旨在为自动驾驶车辆提供感知、决策和控制等关键功能。Autoware 的目标是提供一个可靠、安全且易于使用的软件框架,帮助开发者加速自动驾驶技术的研究和实现。
Autoware 平台的主要特点包括:
1.感知和感知融合:Autoware 支持多种传感器数据的接入和处理,包括激光雷达、摄像头、雷达等。它提供了感知和感知融合的算法和工具,用于生成车辆周围环境的地图和障碍物信息。
2.路径规划和决策:Autoware 提供了各种路径规划和决策算法,可用于生成车辆的行驶路径和决策行为。它支持基于地图的路径规划、障碍物避让和交通规则遵守等功能。
3.控制和执行:Autoware 提供了车辆控制和执行的功能,将生成的路径和决策转化为车辆的实际行动。它支持车辆的加速、转向和制动控制等操作,以实现目标行驶行为。
4.硬件和平台兼容性:Autoware 兼容多个自动驾驶车辆平台和硬件设备。它可以与不同厂商的传感器、计算平台和车辆接口进行集成,提供灵活的部署和开发选项。
Autoware 在自动驾驶领域得到了广泛的应用和社区支持。它为研究机构、企业和开发者提供了一个强大的工具,用于实现自动驾驶车辆的功能和性能。此外,Autoware 还积极参与开源社区,促进自动驾驶技术的共享和合作
Autoware 计算模块
Autoware 平台的计算模块主要负责处理感知数据、进行决策和路径规划,并控制车辆执行相应的行动。以下是 Autoware 平台中常用的计算模块:
1.感知模块:感知模块负责处理来自多种传感器的数据,例如激光雷达、摄像头、雷达等。它使用感知算法对传感器数据进行处理和分析,以获得车辆周围环境的信息。感知模块可以生成障碍物检测、车道检测、交通信号识别等感知结果,为后续的决策和规划提供输入。
2.决策模块:决策模块基于感知结果和预定义的规则、算法进行决策。它评估当前道路和交通环境,根据预设的目标和策略,确定车辆的行驶行为。决策模块可以考虑障碍物避让、交通规则遵守、路径选择等因素,生成相应的决策指令。
3.路径规划模块:路径规划模块使用车辆当前位置、目标位置和地图信息,生成车辆的行驶路径。它考虑到交通规则、道路条件和障碍物等因素,为车辆提供安全、高效的行驶路径。路径规划模块可以采用不同的算法,例如A*算法、Dijkstra算法等,以满足不同场景和要求。
4.控制模块:控制模块接收路径规划和决策模块的指令,控制车辆的加速、制动和转向等动作。它通过与车辆的控制系统进行交互,实现准确的车辆控制。控制模块可以使用PID控制器、模型预测控制器等算法,对车辆的姿态和速度进行精确控制。
上述计算模块在 Autoware 平台中紧密配合工作,实现自动驾驶车辆的感知、决策和控制能力。这些模块的设计和算法选择可以根据具体应用场景和需求进行定制化配置,以满足不同的自动驾驶任务和性能要求。
Autoware开发平台
Autoware 是一个开发平台,为开发者提供了一套丰富的工具和库,用于构建自动驾驶系统。下面介绍 Autoware 开发平台的主要组件和功能:
1.ROS(Robot Operating System):Autoware 基于 ROS,它是一个广泛应用于机器人开发的开源框架。ROS 提供了一种模块化的架构,允许开发者通过节点(Nodes)之间的消息传递和服务调用来构建复杂的系统。Autoware 利用 ROS 提供的通信机制和工具集成了各个组件。
2.软件包集合:Autoware 包含了一系列的软件包,涵盖了自动驾驶系统的各个方面。其中包括感知(Perception)模块、规划(Planning)模块、控制(Control)模块等。这些软件包提供了算法和功能实现的代码库,为开发者提供快速开发和集成的基础。
3.算法和工具:Autoware 提供了多种感知、决策和控制的算法和工具。例如,激光雷达数据处理、摄像头图像处理、障碍物检测和跟踪、路径规划和决策算法等。开发者可以根据具体需求选择和配置适合的算法,进行自定义开发。
4.数据集和仿真:Autoware 提供了一些示例数据集和场景,用于测试和验证算法和系统性能。此外,Autoware 还提供了基于仿真的测试和评估工具,使开发者能够在虚拟环境中模拟各种场景和情况,进行系统性能测试和验证。
5.社区支持和文档:Autoware 拥有庞大的开源社区支持,开发者可以在社区中获取技术支持、交流经验和共享代码。此外,Autoware 提供了详细的文档和教程,帮助开发者理解平台的不同部分和功能,并进行系统配置和开发。
Autoware 开发平台提供了一个全面且灵活的开发环境,使开发者能够快速构建和测试自动驾驶系统。它的设计和建模以适应多种硬件平台和配置,并鼓励开发者进行定制开发,以满足特定应用需求。通过 Autoware,开发者可以加速自动驾驶技术的研发和应用落地。
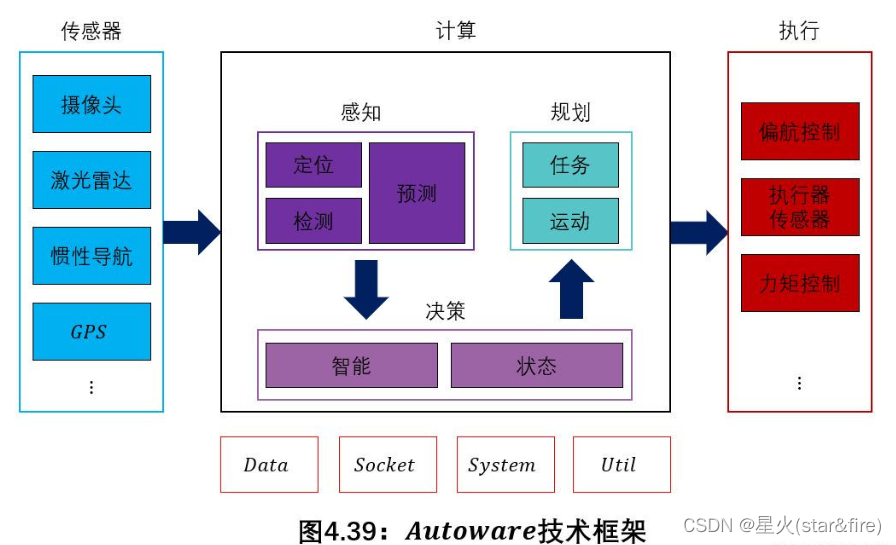
Autoware的系统技术框架
Autoware 的系统技术框架基于 ROS(Robot Operating System),提供了一个模块化、可扩展的结构,以支持自动驾驶系统的开发。以下是 Autoware 的系统技术框架的主要组件和层次:
1.感知层(Perception Layer):感知层负责处理和解释来自车辆周围环境的传感器数据,以获取对道路、障碍物、行人和交通标志等的感知信息。这包括图像、激光雷达、雷达和 GPS 等传感器的数据处理和分析。感知层的算法可以包括障碍物检测、目标跟踪、车道检测和交通信号识别等。
2.本地化层(Localization Layer):本地化层负责将车辆准确地定位在地图上的位置,并提供车辆的姿态信息。这可以通过使用 GPS、IMU(惯性测量单元)和轮速传感器等数据,结合激光雷达等传感器的扫描数据来实现。本地化层的算法可以包括点云匹配、姿态估计和地标识别等。
3.规划层(Planning Layer):规划层负责根据感知和本地化信息,生成车辆的行驶路径,以实现预定的目标并遵守交通规则。它可以使用路径规划算法,考虑到障碍物避让、车辆动力学、道路条件和用户目标等因素。规划层还可以将车辆行驶分解为连续的轨迹或轨迹段,以实现平滑和安全的行驶。
4.控制层(Control Layer):控制层负责将规划层生成的轨迹转化为车辆的具体控制指令,例如加速、制动和转向。它使用车辆的动力学模型和传感器数据,计算出适合的控制指令,以实现精确的车辆控制和稳定的行驶。控制层还可以包括对环境和故障的检测和响应功能。
5.用户界面层(User Interface Layer):用户界面层提供了与 Autoware 系统交互的接口,以便用户进行系统配置、任务设置和监控。它可以是图形用户界面(GUI)、终端命令行界面或其他定制化的用户界面,使用户能够与系统进行交互和控制。
通过这样的系统技术框架,Autoware 提供了一个有组织且高度可定制的软件平台,支持自动驾驶系统的开发和实施。开发者可以选择不同的算法和组件,根据具体需求和硬件平台进行配置和集成,从而构建出适应不同场景和应用要求的自动驾驶系统。
Autoware 执行模块
Autoware 执行模块是 Autoware 软件平台的核心组件,它负责将感知、规划和控制等功能整合起来,实现自动驾驶系统的执行和运行。
Autoware 执行模块由多个子模块组成,包括但不限于以下几个重要的执行模块:
1.Perception(感知):感知模块负责处理和解释来自车辆周围环境的传感器数据,如激光雷达和相机等。它包括点云和图像处理算法,用于障碍物检测、车道线检测、交通信号识别等任务。
2.Localization(本地化):本地化模块用于定位车辆在地图中的准确位置和姿态。它使用来自 GPS、IMU 和其他传感器的数据,结合地图信息和特征匹配算法,实现车辆的精确定位。
3.Planning(规划):规划模块基于感知和本地化数据,生成车辆的行驶路径和轨迹。它考虑到障碍物避让、车辆动力学、交通规则等因素,以实现安全而有效的行驶策略。
4.Control(控制):控制模块将规划模块生成的轨迹转化为具体的车辆控制指令,实现车辆的精确控制。它通过控制车辆的油门、刹车、转向等执行器,实现对车辆的动态控制。
5.System Management(系统管理):系统管理模块负责监控和管理整个 Autoware 系统的运行。它可以包括日志记录、故障检测、软件更新等功能,以确保系统的稳定运行和可维护性。
这些执行模块通过 ROS(Robot Operating System)的消息传递机制进行交互和通信,实现数据的共享和协调。开发者可以根据具体需求和场景,选择和配置适当的执行模块,并进行集成和定制化开发,以构建出符合自己需求的自动驾驶系统。

