
热门标签
热门文章
- 1微信小程序--》小程序—自定义组件使用_微信小程序组件使用
- 2oracle sql 格式化 金额 (三位加逗号),如 12,222,210.73_sql去金额格式化
- 3uniapp网络请求获取数据_uni-app 网络请求
- 4VMware 安装安卓_vmware安装安卓系统
- 5熟识 : 计算机文化(收藏)
- 6vue 模板中使用 console.log_vue console.log
- 7uniapp 微信小程序小票打印机打印教程(超详细讲解) 完整代码,下载后可直接使用_uniapp 打印功能
- 8华为面试手撕代码真题【数组元素TOP1】
- 9掌握Guava的并发工具:轻松应对复杂并发场景_guava并发工具类
- 10Timer和TimerTask
当前位置: article > 正文
【双目视觉】双目立体匹配
作者:IT小白 | 2024-03-23 23:02:31
赞
踩
双目立体匹配
一、双目立体匹配算法
在opencv中用的比较多的双目立体匹配算法有两种:BM和SGBM。SGBM是BM立体匹配算法的优化版,属于半全局匹配,相对于BM花的时间要更多,但效果优于BM。本文使用的是SGBM半全局匹配方式。
步骤:
1.打开相机,获取到左目和右目的图像;
2.矫正畸变;
3.图像灰度化;
4.立体匹配,输出结果。
代码步骤
导入所需的第三方库
import cv2
import numpy as np
# 畸变矫正脚本
import camera_config
- 1
- 2
- 3
- 4
矫正畸变
left_remap = cv2.remap(imgLeft, camera_config.left_map1, camera_config.left_map2, cv2.INTER_LINEAR)
right_remap = cv2.remap(imgRight, camera_config.right_map1, camera_config.right_map2, cv2.INTER_LINEAR)
- 1
- 2
灰度化
imgL_gray = cv2.cvtColor(left_remap, cv2.COLOR_BGR2GRAY)
imgR_gray = cv2.cvtColor(right_remap, cv2.COLOR_BGR2GRAY)
- 1
- 2
立体匹配
### 设置参数 #块大小必须为奇数(3-11) blockSize = 5 img_channels = 2 num_disp = 16 * 8 param = { 'preFilterCap': 63, #映射滤波器大小,默认15 "minDisparity" : 0, #最小视差 "numDisparities" : num_disp, #视差的搜索范围,16的整数倍 "blockSize" : blockSize, "uniquenessRatio" : 10, #唯一检测性参数,匹配区分度不够,则误匹配(5-15) "speckleWindowSize" : 0, #视差连通区域像素点个数的大小(噪声点)(50-200)或用0禁用斑点过滤 "speckleRange" : 1, #认为不连通(1-2) "disp12MaxDiff" : 2, #左右一致性检测中最大容许误差值 "P1" : 8 * img_channels * blockSize** 2, #值越大,视差越平滑,相邻像素视差+/-1的惩罚系数 "P2" : 32 * img_channels * blockSize** 2, #同上,相邻像素视差变化值>1的惩罚系数 # 'mode': cv2.STEREO_SGBM_MODE_SGBM_3WAY } ## 开始计算深度图 left_matcher = cv2.StereoSGBM_create(**param) left_disp = left_matcher.compute(imgL_gray, imgR_gray) # 得到深度图 disp = cv2.normalize(dispL, dispL, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
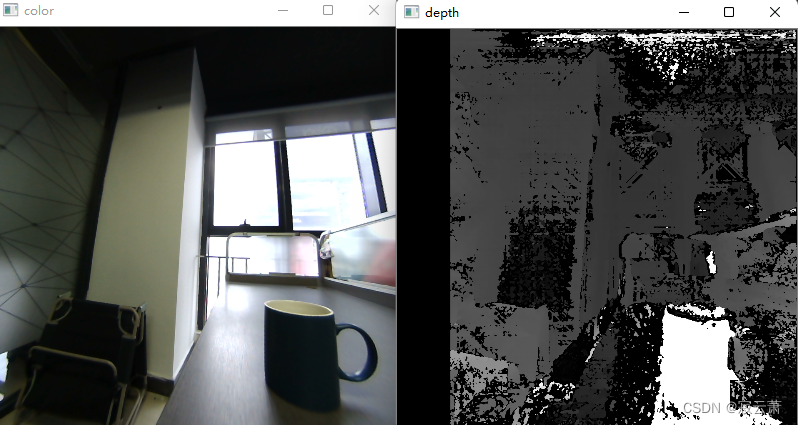
效果
二、wls滤波
从上面的结果来看,深度图存在很多“黑色区域”,“黑色区域”是没有正确匹配的地方,也就是说这部分是没有深度信息的,这种情况就是“不够稠密”。
在opencv的扩展包opencv-contrib里提供了一种WLS视差滤波的办法,可以使得重建更加稠密。
改进部分为立体匹配部分,在经过立体匹配后再做一步处理:
## 接上面的参数 left_matcher = cv2.StereoSGBM_create(**param) right_matcher = cv2.ximgproc.createRightMatcher(left_matcher) left_disp = left_matcher.compute(imgL_gray, imgR_gray) right_disp = right_matcher.compute(imgR_gray, imgL_gray) wls_filter = cv2.ximgproc.createDisparityWLSFilter(left_matcher) # sigmaColor典型范围值为0.8-2.0 wls_filter.setLambda(8000.) wls_filter.setSigmaColor(1.3) wls_filter.setLRCthresh(24) wls_filter.setDepthDiscontinuityRadius(3) filtered_disp = wls_filter.filter(left_disp, imgL_gray, disparity_map_right=right_disp) disp = cv2.normalize(filtered_disp, filtered_disp, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
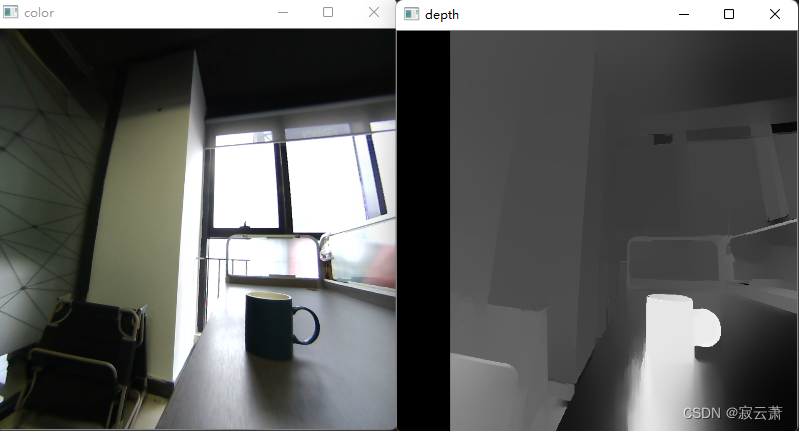
可以看到滤波之后的深度图变得相当稠密了。
但这种办法有利有弊:好处就是重建变得稠密,弊端就是这种办法会抹除掉一些细节深度,使得一块地方由原来的不同深度变成同一高度。
举个例子,上图中的杯子在实际观察中他应该是圆柱形,但滤波之后整个杯身将变成同一高度,即原来的高度差被抹除了。因此该方法请根据具体情况决定是否使用。
三、open3d点云重建
open3d提供了RGBD重建的办法,具体实现如下:
首先要准备一个相机内参文件(这样做比较省事),命名为camera_intrinsic.json,
根据左目相机内参矩阵:
| fx | 0 | cx |
|---|---|---|
| 0 | fy | cy |
| 0 | 0 | 1 |
以列为顺序写入:
{
"width": 960,
"height": 960,
"intrinsic_matrix": [
fx,
0,
0,
0,
fy,
0,
cx,
cy,
1
]
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
保存,作为相机内参文件。再在主程序中继续接入以下代码:
# 获取内参
intrinsic = o3d.io.read_pinhole_camera_intrinsic("camera_intrinsic.json")
# 转换图像
color_image = o3d.geometry.Image(left_remap)
depth_image = o3d.geometry.Image(disp)
rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(color_image, depth_image, depth_trunc=4.0, convert_rgb_to_intensity=False)
# 根据RGBD图像重建
temp = o3d.geometry.PointCloud.create_from_rgbd_image(rgbd_image, intrinsic)
pcd.points = temp.points
pcd.colors = temp.colors
# 显示效果
o3d.visualization.draw_geometries_with_editing([pcd], window_name="3D", width=1280, height=720)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12

四、OpenCV的点云重建
除此之外也可以用opencv自带的办法重建,这个重建速度要比open3d快很多。
处理时需要剪掉一些不合理的点云数据。
# 将h×w×3数组转换为N×3的数组 def hw3ToN3(points): height, width = points.shape[0:2] points_1 = points[:, :, 0].reshape(height * width, 1) points_2 = points[:, :, 1].reshape(height * width, 1) points_3 = points[:, :, 2].reshape(height * width, 1) points_ = np.hstack((points_1, points_2, points_3)) return points_ def DepthColor2Cloud(points_3d, colors): rows, cols = points_3d.shape[0:2] size = rows * cols points_ = hw3ToN3(points_3d).astype(np.int16) colors_ = hw3ToN3(colors).astype(np.int64) # 颜色信息 blue = colors_[:, 0].reshape(size, 1) green = colors_[:, 1].reshape(size, 1) red = colors_[:, 2].reshape(size, 1) # rgb = np.left_shift(blue, 0) + np.left_shift(green, 8) + np.left_shift(red, 16) rgb = blue + green + red # 将坐标+颜色叠加为点云数组 pointcloud = np.hstack((points_, red/255., green/255., blue/255.)).astype(np.float64) # 删掉一些不合适的点 X = pointcloud[:, 0] Y = pointcloud[:, 1] Z = pointcloud[:, 2] remove_idx1 = np.where(Z <= 0) remove_idx2 = np.where(Z > 1000) remove_idx3 = np.where(X > 1000) remove_idx4 = np.where(X < -1000) remove_idx5 = np.where(Y > 1000) remove_idx6 = np.where(Y < -1000) remove_idx = np.hstack((remove_idx1[0], remove_idx2[0], remove_idx3[0], remove_idx4[0], remove_idx5[0], remove_idx6[0])) pointcloud_1 = np.delete(pointcloud, remove_idx, 0) return pointcloud_1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
上面的函数可以单独用一个脚本文件保存再导入。
主脚本文件加入以下代码:
threeD = cv2.reprojectImageTo3D(disp, camera_config.Q)
pointcloud = DepthColor2Cloud(threeD, left_remap)
# 转换为open3d的点云数据
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(pointcloud[:,:3])
pcd.colors = o3d.utility.Vector3dVector(pointcloud[:,3:])
o3d.visualization.draw_geometries_with_editing([pcd], window_name="3D", width=1280, height=720)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/298278?site
推荐阅读
相关标签

