
热门标签
热门文章
- 1使用 FasterTransformer 和 Triton 推理服务器加速大型 Transformer 模型的推理
- 2计算机直博毕业要求两篇顶会一作难度如何?
- 3经验篇:朋友成功入职商汤自然语言处理算法工程师,整理了一份自然语言处理入门学习资料(NLP自然语言处理/学习路径)_自然语言处理算法工程师培训见习内容
- 4如何看待第三代神经网络SNN?详解脉冲神经网络的架构原理、数据集和训练方法 原创
- 5Windows环境下搭建chatGLM2-6B-int4量化版模型(图文详解-成果案例)_chatglm 小白搭建
- 6java - 实现list「object」中某个属性的对比_java 判断 list对象中某几个属性值比较大小
- 7大数据毕业设计之Python+Vue.js知识图谱音乐推荐系统 音乐爬虫可视化 音乐数据分析 大数据毕设 大数据毕业设计 机器学习 深度学习 人工智能 数据可视化 计算机毕业设计
- 8MMSegmention系列之四(自定义数据集与自定义数据增强管道)_samples_per_gpu
- 9任务4:ChatGPT文本分类_使用chatglm完成中文文本分类
- 10pycharm复习
当前位置: article > 正文
机器人导航(1):概述
作者:IT小白 | 2024-03-30 05:10:43
赞
踩
机器人导航
导航模块简介
机器人是如何实现导航的呢?或换言之,机器人是如何从 A 点移动到 B 点呢?ROS 官方为了提供了一张导航功能包集的图示,该图中囊括了 ROS 导航的一些关键技术:
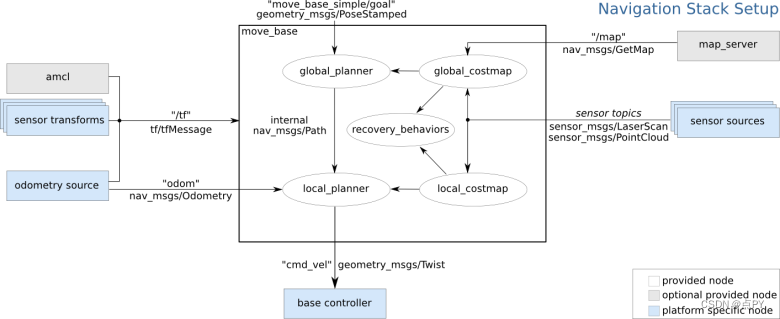
假定我们已经
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/339228
推荐阅读
相关标签

