
- 1Android Studio 导入及关联framework源码_androidstudio 打开android framework
- 2交换机进行读写rtl8306.c驱动源码_rtl836 驱动
- 3【Matlab算法】梯度下降法(Gradient Descent)(附MATLAB完整代码)_matlab 梯度下降法
- 4如何用python编辑 一个偶数总能表示为两个素数之和_python偶数拆成两个素数之和
- 5鸿蒙系统(HarmonyOS)理论基础合集(六):创建鸿蒙工程_鸿蒙系统指令代码大全
- 6电话拨键号码(DTMF信号)识别_dtmf拨号判读 csdn
- 7使用Git下载Android源代码_app源码 git下载
- 8vue 监听滚动条行为 | 判断滚动条是向上滚动还是向下滚动_vue 判断滚动条滚动方向
- 9ArcGIS批量裁剪栅格数据(ArcPy方法)
- 10Android中kernel内核模块编译执行_安卓kernel编译
DWA路径规划算法_位置控制转换成速度控制 dwa
赞
踩
目录
1、基本概念
基于动态窗口避障算法。该算法利用机器人的速度模型(机器人的位置控制转化为速度控制),计算出可能的轨迹,并判断出不会碰撞的速度【速度空间(横坐标 V , 纵坐标 W )】,以此速度驱动机器人移动,实现安全导航。
将位置控制转化为速度控制,在速度空间中采取多组速度,并模拟出这些速度在一定时间内的运动轨迹规划。通过评价函数对这些轨迹进行评价,选取一个最优的轨迹。在速度搜索空间里搜索速度和角速度会收到各种限制条件(后面讲)。对于评价函数可以根据自己的需求进行修改。
相对于其他局部路径算法(人工势场法),DWA算法在计算量、稳定性和避障效果这些方面的性能指标更为良好。
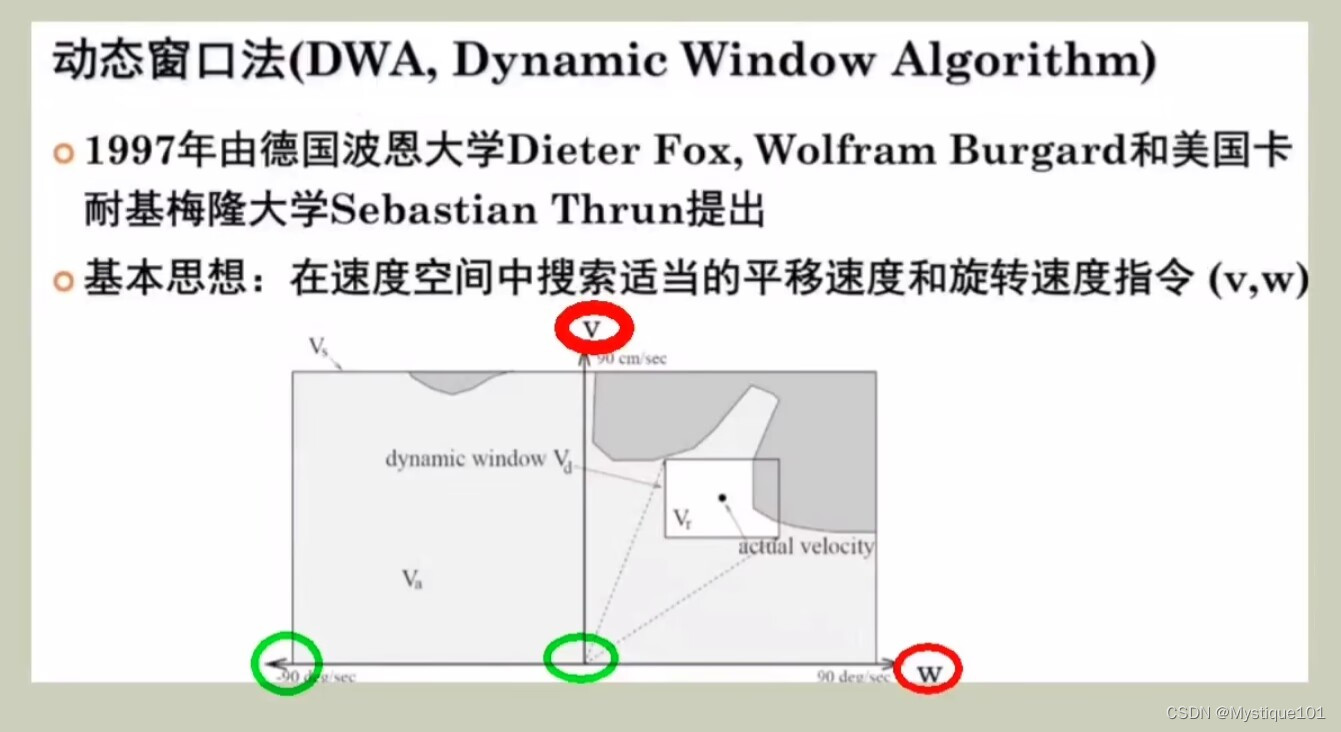
从集合空间搜索转化为速度空间搜索
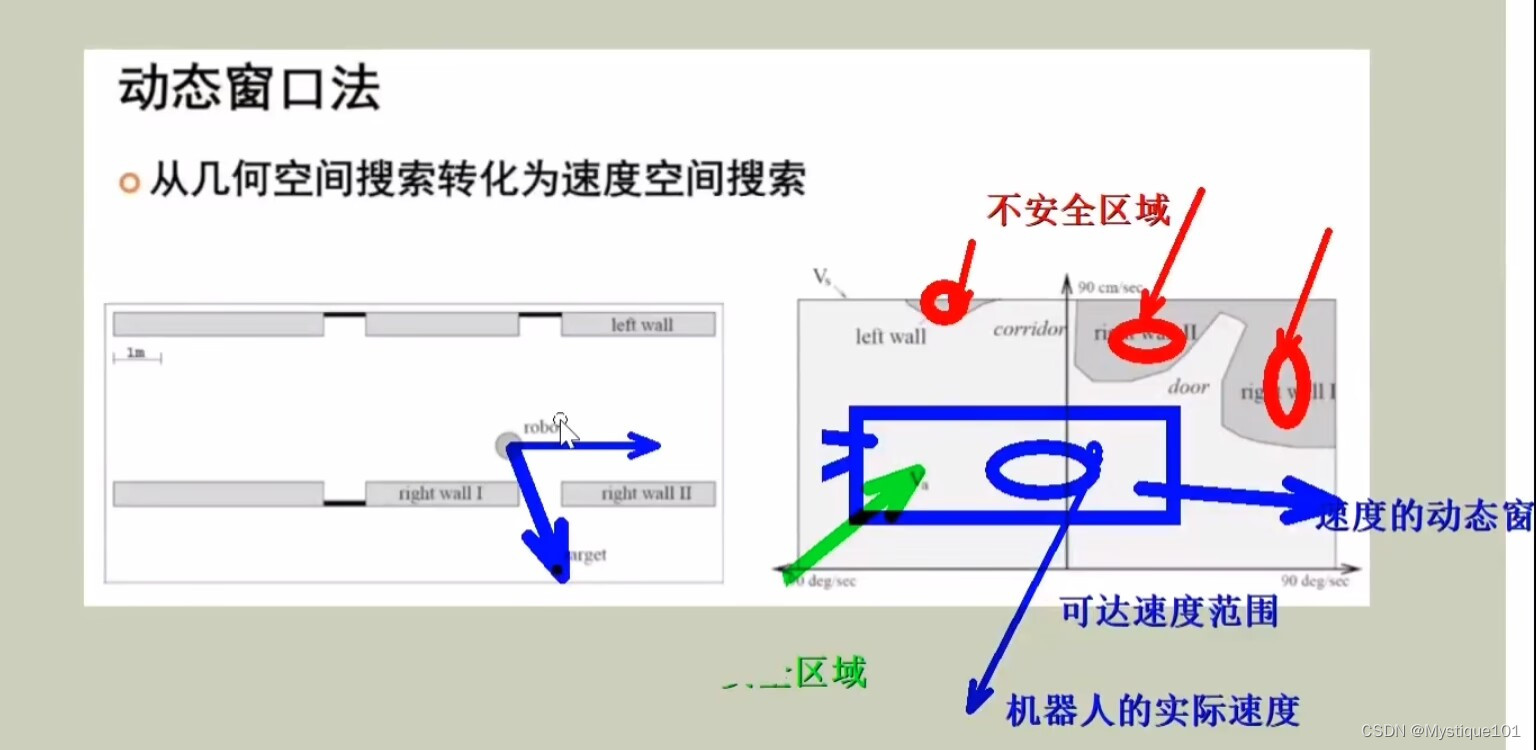
不同的速度指令(V,W)会得到不同的运动半径,同样的时间间隔到达不同的终止位置。有些位置是安全的,有些会与障碍物发生碰撞。假如有5对 V ,5对 W ,组合起来就会有25种方案。
2、实现步骤
(1)基于速度控制运动模型,构建可行的速度空间;
(2)考虑到机器人在运动过程中最大加速度的约束,在当前速度配置处以固定的小时间间隔开一个速度窗口空间;

(3)结合机器人速度约束,获得可行速度空间为
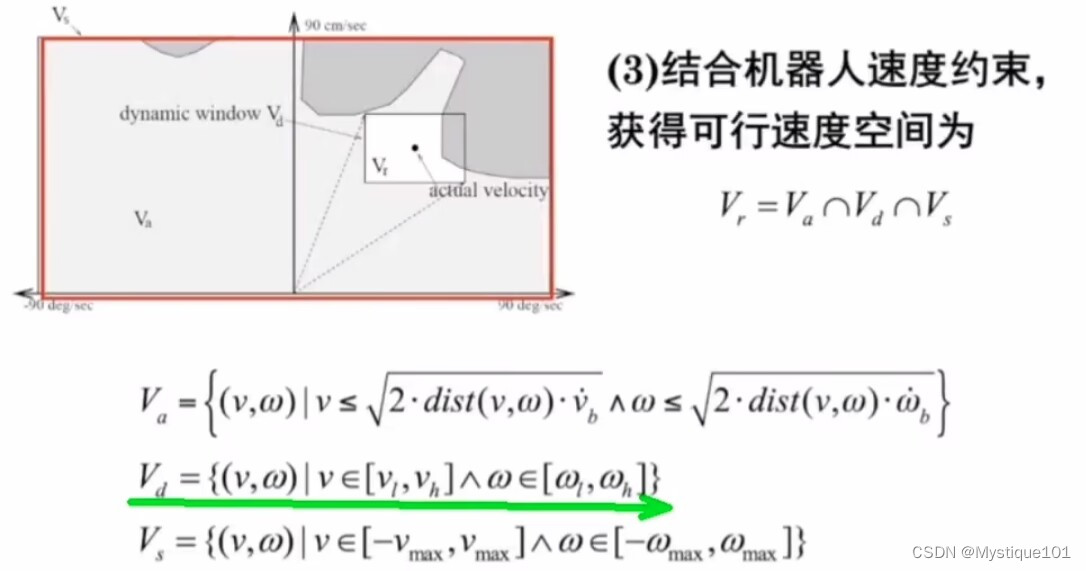
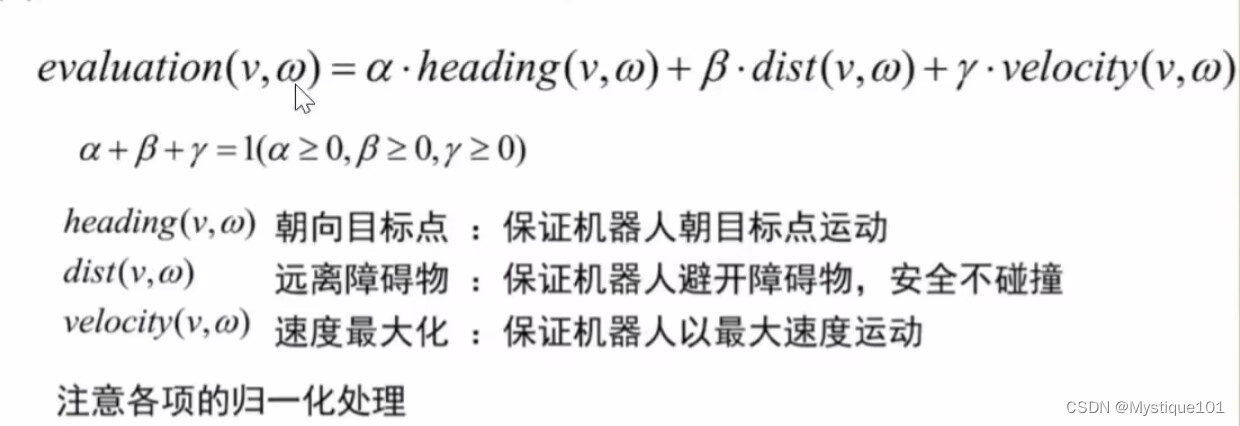
(4)在可行速度空间中选择最优的速度控制指令
存在问题:
- 根据单步信息数据计算期望速度,在评估选择速度时,不考虑速度和路径平滑,容易导致机器人运动存在震动和轨迹扭动问题;
- 参数较多,实际实现依赖工程经验,难以适应各种情况。
具体改进思路有以下几个:
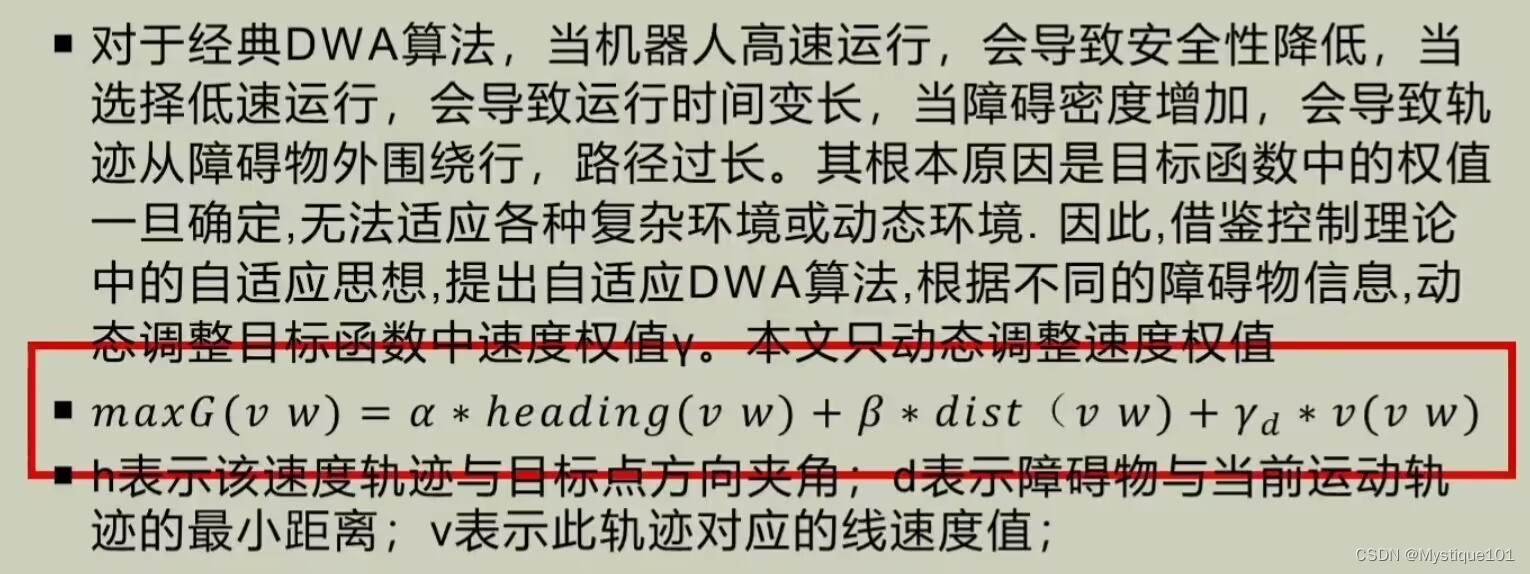
1,自适应其他两个权值;对于,
,
,比如当障碍物来的时候,可以让
比
和
大一些,让它优先去避障。当没有障碍物时,让
大一些,让它以最大的速度趋向于目标点。
2,结合其他全局路径规划算法;首先对于小车,规划出全局路径,然后就可以通过路径评价或者转点评价子函数进行局部规划。
3,路径评价子函数;
4,转点评价子函数;
5,速度平稳子函数。

