
热门标签
热门文章
- 1如果谷歌浏览器突然打不开网页,显示:“网页可能暂时无法连接,或者它已永久性地移动到了新网址,返回ERR_TUNNEL_CONNECTION_FAILED“,亲测有效。_网页可能暂时无法连接,或者它已永久性地移动到了新网址。
- 2合泰HT32F52352--elink32烧录器快速使用指南_ht32f52352st-link烧录
- 3C++学习第二十八课:C++ 中的智能指针详解
- 4微信小程序 教你如何复制页面路径 (以及京东、虎牙、苏宁、拼多多、等大厂的加密路径详解)(多图!!!)_京东微信小程序商品链接
- 5GIT操作:把当前仓库的一个分支push到另一个仓库的指定分支_gitpush到指定branch
- 6实验4 TCP协议分析_阿里云实验4 tcp协议分析
- 7C、C++中对json格式数据的解析和封装_c++ json
- 8高校选课系统需求分析开发源码
- 9【雕爷学编程】Arduino智能家居之智能浇花系统_arduino自动浇花系统
- 10linux系统服务器日志,Linux操作系统服务器日志管理详解
当前位置: article > 正文
【MATLAB】PRM+A star(A*)寻路算法改进_a星算法改进matlab代码
作者:IT小白 | 2024-04-28 11:48:25
赞
踩
a星算法改进matlab代码
目录
1 原算法链接
【MATLAB】PRM+A star(A*)寻路算法实现_一只小白白的博客-CSDN博客
2 改进部分
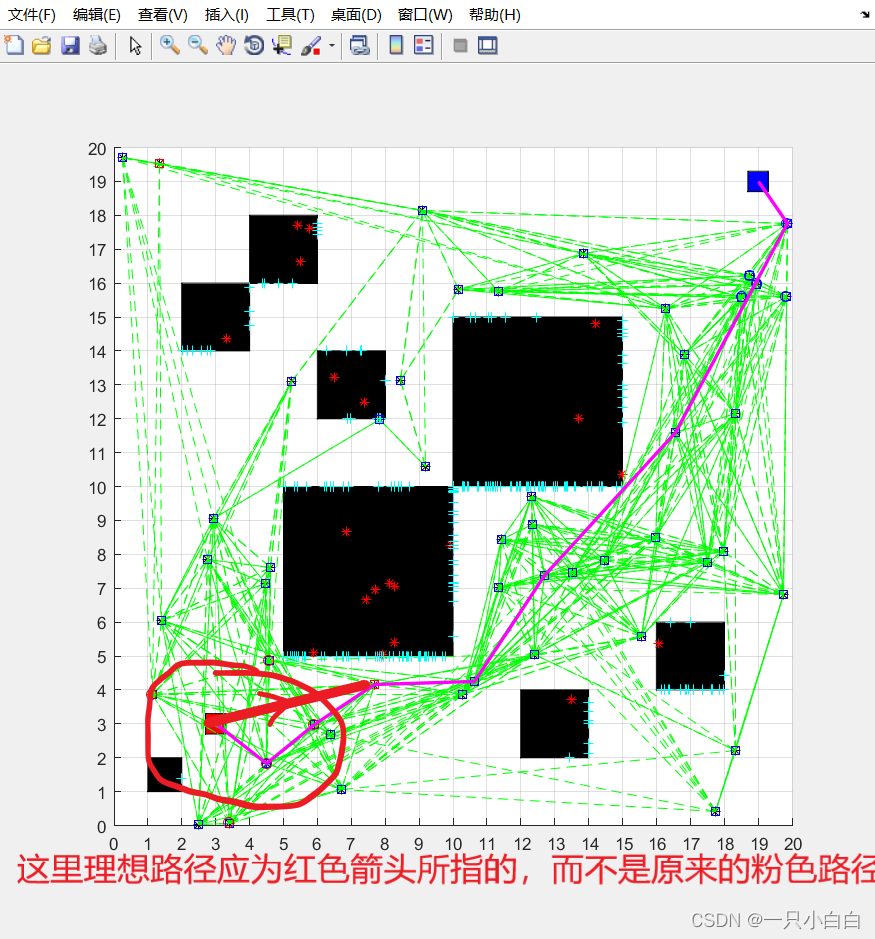
原算法是在PRM建立好图G后再确定起始点和终止点,这样就存在一个问题,就是原算法没有将设定的起始点和终止点信息纳入图G中,导致A*搜索出来的路径虽然是最优的,但其实那段起始路径(连接起始点和G中起始点的路径)和终止的路径(连接终止点和G中终止点的路径)不是全局最优的,原算法寻路效果如下:
改进方法也很简单,将设定的起始点和终止点纳入图G中,原本nxn的图变为了(n+2)x(n+2)的图,改进后的PRM算法代码如下:
- function [allV,graph,Index_startInPRM,Index_endInPRM]= build_PRM(n,k,QLIST,MAX_X,MAX_Y,qset)
- % 随机生成节点数组
- V=[];
- % 初始化图的二维数组(n+2 * n+2)----包含起始点和终止点qset
- G=zeros(n+2);
- % 障碍物个数
- Obstacle_Num = size(QLIST,1);
- %% 绘制障碍物模型
- for i=1:Obstacle_Num
- Q = [QLIST(i,1:4);QLIST(i,5:8)];
- fill(Q(1,:),Q(2,:),'k');
- hold on
- end
- %% 初始化图G的相邻节点间边的权值
- for i=1:n+2
- for j=1:n+2
- if ~isequal(i,j)
- G(i,j)=inf;
- end
- end
- end
- %% 随机生成n个节点,判断是否落在障碍物上,如果不在障碍物中,将其加入节点数组V中
- % 将初始点和终止点先加入V中
- V = [V,qset(:,1)];
- V = [V,qset(:,2)];
- % 返回搜索初始点和终止点的索引
- Index_startInPRM = 1;
- Index_endInPRM = 2;
- % 随机生成节点加入V中
- if Obstacle_Num==0
- while size(V,2)<n+2
- qrand=[MAX_X*rand;MAX_Y*rand];
- V=[V,qrand]; % 由于没有障碍物,直接填充即可
- end
- else
- while size(V,2)<n+2
- qrand=[MAX_X*rand;MAX_Y*rand];
- % 存在障碍物时,需要剔除随机生成在障碍物上的点,保留符合条件的点
- for m=1:Obstacle_Num
- Q = [QLIST(m,1:4);QLIST(m,5:8)];
- Q = [Q,Q(:,1)];
- [in,on] = inpolygon(qrand(1),qrand(2),Q(1,:),Q(2,:));
- if (in==1 || on==1)
- plot(qrand(1),qrand(2),'r*'); hold on;
- break;
- elseif m==Obstacle_Num
- V=[V,qrand];
- plot(qrand(1),qrand(2),'k*'); hold on;
- end
- end
- end
- end
- %% 根据上面生成的n个节点,填充图G的数据
- if Obstacle_Num==0
- for j=1:size(V,2)
- % 找出当前节点j邻近的k个节点,找出的邻近点包括自己,且为第一个索引值,即ind(1)
- ind= knnsearch( V', V(:,j)', 'k',k+1);
- ind_temp = [];
- for i=2:size(ind,2)
- % 保证邻近节点Nq不包括自己
- ind_temp = [ind_temp,ind(i)];
- Nq(:,i-1)= V(:,ind(i));
- end
- ind = ind_temp;
- % 遍历这k个节点,因为没有障碍物,所以直接把当前节点与其邻近节点相连即可
- for i=1:size(Nq,2)
- G(j,ind(i))=1; % 如果一直到最后一个障碍物都没有交叉,则此邻近节点与j节点可通行,权值设为1
- G(ind(i),j)=1;
- plot([V(1,j),Nq(1,i)],[V(2,j),Nq(2,i)],'g--');
- pause(0.01);
- hold on
- end
- end % 结束 for 循环
- else
- for j=1:size(V,2)
- plot(V(1,j),V(2,j),'rs'); hold on;
- % 找出当前节点j邻近的k个节点,找出的邻近点包括自己,且为第一个索引值,即ind(1)
- ind= knnsearch( V', V(:,j)', 'k',k+1);
- ind_temp = [];
- % 保证邻近节点Nq不包括自己
- for i=2:size(ind,2)
- ind_temp = [ind_temp,ind(i)];
- Nq(:,i-1)= V(:,ind(i));
- plot(Nq(1,i-1),Nq(2,i-1),'bs'); hold on;
- end
- ind = ind_temp;
- % 遍历这k个节点,如果与父节点连线不与障碍物碰撞,则G中相应权值为1,代表两节点之间可通行
- for i=1:size(Nq,2)
- % 遍历所有障碍物,判断第i个邻近节点与j节点的连线与障碍物是否有交叉
- for m=1:Obstacle_Num
- Q = [QLIST(m,1:4);QLIST(m,5:8)];
- if isIntersection( V(:,j),Nq(:,i),Q )==1
- % plot([V(1,j),Nq(1,i)],[V(2,j),Nq(2,i)],'r--');
- break; % 如果有交叉,直接break,进入下一个邻近节点的判断
- elseif m==Obstacle_Num
- G(j,ind(i))=1; % 如果一直到最后一个障碍物都没有交叉,则此邻近节点与j节点可通行,权值设为1
- G(ind(i),j)=1;
- plot([V(1,j),Nq(1,i)],[V(2,j),Nq(2,i)],'g--');
- % pause(0.01);
- hold on
- end
- end
- end
- end % 结束 for 循环
- end % 结束 if和else 判断
-
- % 输出图G和节点信息V
- allV=V;
- graph=G;
-
- end
A*算法部分代码不用改动,主函数改动如下:
- %%----------------------------------------------
- % Author: Yinsong Qu
- % Date: 8,14,2023
- % Email: quyinsong@hrbeu.edu.cn
- %%----------------------------------------------
- clc
- clear all
- close all
- %% 1. Run PRM
- %get the graph by running PRM and map lot
- %V is all the qs'
- qset=[3 19;3 19]; % 1st column: q_initial, 2nd: q_goal
- n=50; % 随机生成的节点数
- k=20; % 每个节点最大允许的邻近子节点数量
- % 多边形表示的障碍物
- Q1=[1 2 2 1;1 1 2 2]; % 障碍物
- Q2=[10 15 15 10;
- 10 10 15 15]; % 障碍物
- Q3=[5 10 10 5;
- 5 5 10 10]; % 障碍物
- Q4=[2 4 4 2;14 14 16 16]; % 障碍物
- Q5=[4 6 6 4;16 16 18 18]; % 障碍物
- Q6=[16 18 18 16;4 4 6 6]; % 障碍物
- Q7=[12 14 14 12;2 2 4 4]; % 障碍物
- Q8=[6 8 8 6;12 12 14 14]; % 障碍物
- % 障碍物列表
- QLIST = [Q1(1,1:4),Q1(2,1:4);
- Q2(1,1:4),Q2(2,1:4);
- Q3(1,1:4),Q3(2,1:4);
- Q4(1,1:4),Q4(2,1:4);
- Q5(1,1:4),Q5(2,1:4);
- Q6(1,1:4),Q6(2,1:4);
- Q7(1,1:4),Q7(2,1:4);
- Q8(1,1:4),Q8(2,1:4);];
- % QLIST = [];
- % QLIST = [Q2(1,1:4),Q2(2,1:4);Q3(1,1:4),Q3(2,1:4)];
- % 设置地图范围
- MAX_X = 20;
- MAX_Y = 20;
- % 绘制地图,起始点和终止点
- figure(1)
- set(gcf, 'Renderer', 'painters');
- set(gcf, 'Position', [500, 50, 700, 700]);
- set(gca, 'XTick', 0:1:MAX_X);
- set(gca, 'YTick', 0:1:MAX_Y);
- grid on;
- axis equal;
- axis ([0 MAX_X 0 MAX_Y ]);
- hold on;
- LL = 0.3;
- fill([qset(1,1)-LL,qset(1,1)+LL,qset(1,1)+LL,qset(1,1)-LL],[qset(2,1)-LL,qset(2,1)-LL,qset(2,1)+LL,qset(2,1)+LL],'r'); % 起始点
- fill([qset(1,2)-LL,qset(1,2)+LL,qset(1,2)+LL,qset(1,2)-LL],[qset(2,2)-LL,qset(2,2)-LL,qset(2,2)+LL,qset(2,2)+LL],'b'); % 终点
- % 创建随机路图
- [V,G,Index_startInPRM,Index_endInPRM]=build_PRM(n,k,QLIST,MAX_X,MAX_Y,qset);
-
- %% 1. 利用A star算法寻路
- path = A_star_search( G, V, Index_startInPRM,Index_endInPRM );
- repath = [];
- repath = [repath;qset(:,1)'];
- kk = size(path,1);
- for i=1:size(path,1)
- repath = [repath;path(kk,:)];
- kk = kk-1;
- end
- repath = [repath;qset(:,2)'];
- plot(repath(:,1)',repath(:,2)','m-','LineWidth',2)
可以看出相比源代码,不需要找起始点和终止点的函数[Index_startInPRM, Index_endInPRM] = findStartAndEndInPRM( V, qset, QLIST)了
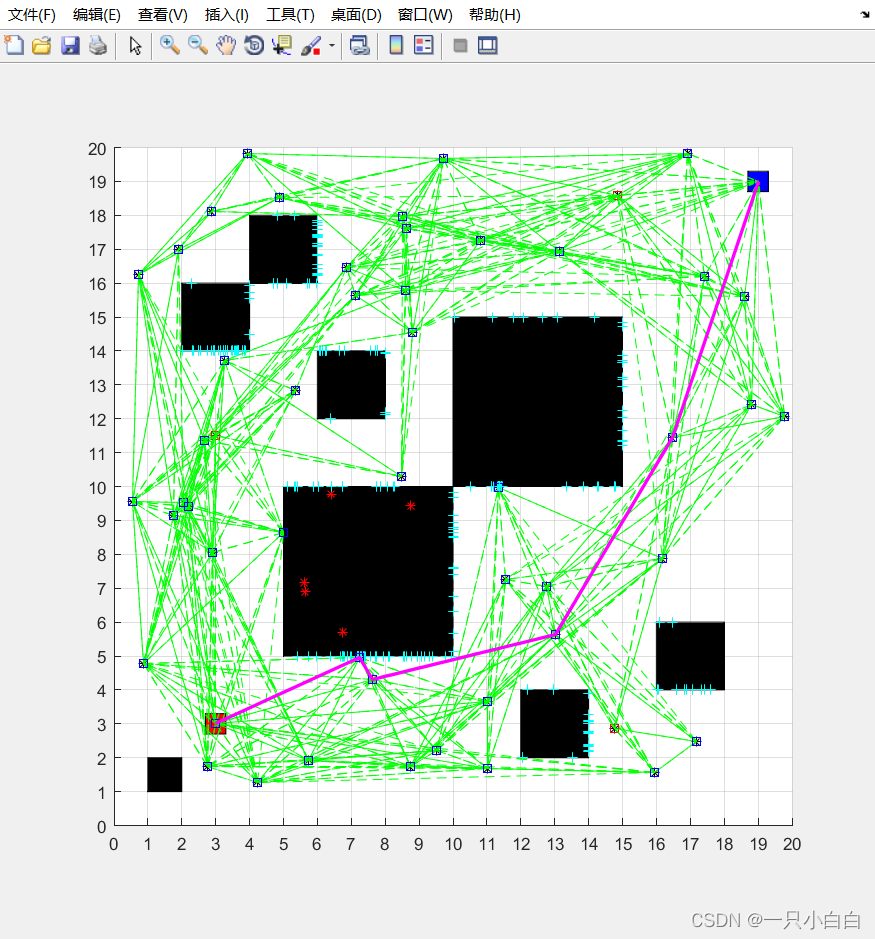
3 改进代码运行效果
4 github链接
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/502070
推荐阅读
相关标签

