
- 1通用大模型_通用大模型一般分为哪些大模型
- 2敏捷开发实践之Scrum方法运用_范文 scrum 论敏捷开发方法
- 3基于SpringBoot+Vue校园失物招领系统设计和实现(源码+LW+部署讲解)
- 4微信小程序怎么使用JSON动画?_小程序实现json动画
- 5Python-层次聚类-Hierarchical clustering
- 6复盘自用:使用yolox训练自己的数据集(仅参考)_yolox训练自己数据集
- 7一天学会PostgreSQL应用开发与管理 - 7 函数、存储过程和触发器
- 8手把手带你写一份优秀的开发求职简历(七)写项目经历的内功心法
- 9【Python】Python进阶系列教程-- Python3 MySQL - mysql-connector 驱动(三)_python3 mysql 插件
- 10【Android】Android Studio报错Unable to start the daemon process. The project uses Gradle 4.4 which is i_java gradle unable to start the
动态路径规划算法融合A星与DWA:实现静态与动态避障,提升路径规划效果_dwa算法加a星算法
赞
踩
基于A星与DWA算法融合的动态路径规划,可实现静态避障碍及动态避障
ID:924745653542898
万物不及DNZ
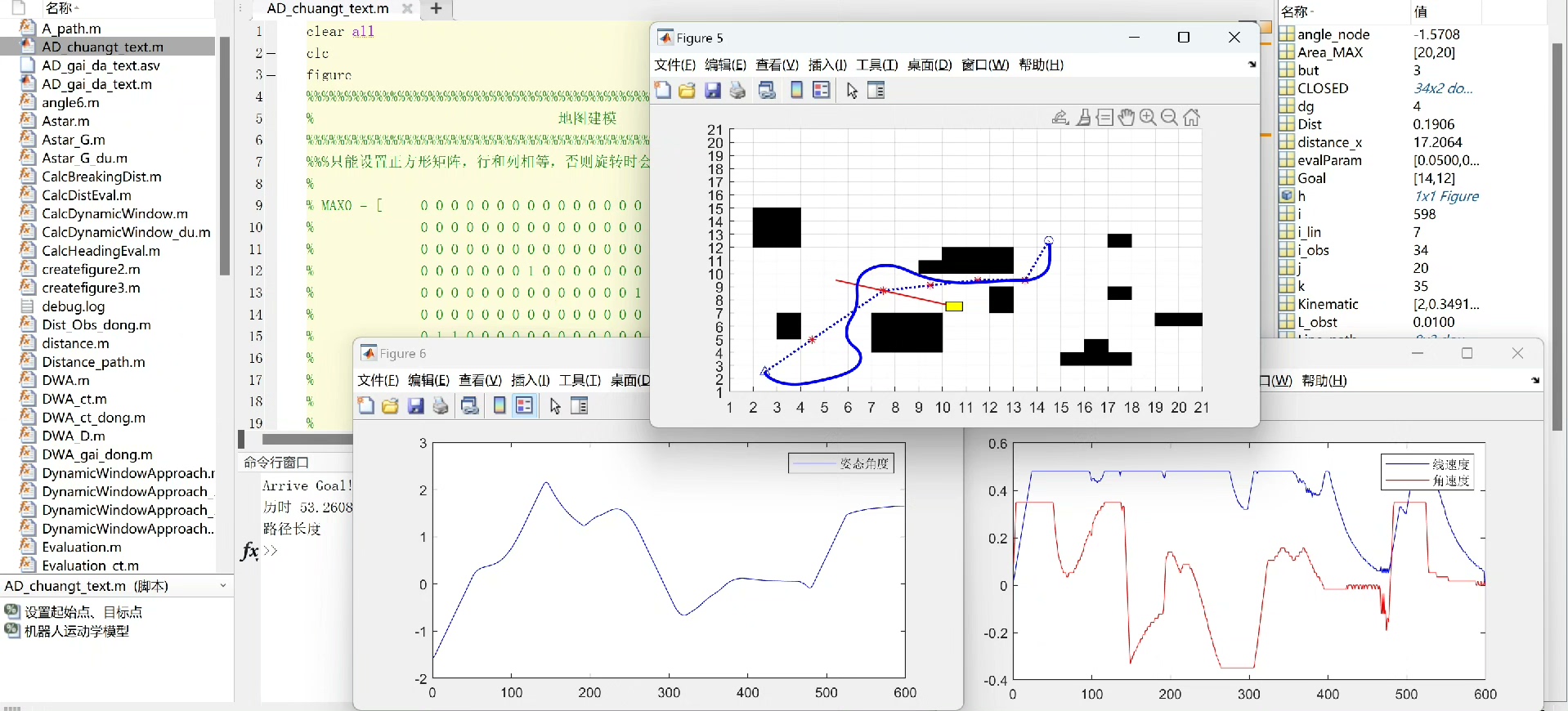
在现代智能机器人技术的发展中,路径规划一直是一个重要的问题。在复杂的环境中,如何快速而准确地规划机器人的运动路径,成为了研究者们关注的焦点。本文将探讨基于A星与DWA算法融合的动态路径规划方法,该方法不仅可以实现静态避障碍,还能应对动态避障的情况。
首先,我们来介绍A星算法。A星算法是一种广泛应用于路径规划的启发式搜索算法,它通过评估节点的代价函数来不断搜索最优路径。在静态环境下,A星算法通过计算每个节点的启发式函数值来确定其代价,然后选择代价最小的节点进行扩展。这样,机器人就能找到一条最优路径来避开障碍物。
然而,在动态环境中,A星算法的效果会受到限制。由于障碍物的运动和环境的变化,A星算法可能无法及时更新节点的代价函数,导致机器人在动态环境中遇到困难。为了解决这个问题,我们引入了DWA算法。
DWA算法是一种基于速度采样的动态路径规划算法,它通过在机器人当前速度附近采样一系列速度候选集合,然后评估每个速度的代价函数值,最终选择代价最小的速度作为机器人的下一步动作。DWA算法具有较高的实时性和适应性,能够在动态环境中快速规划机器人的运动路径。
在本文中,我们将A星算法与DWA算法进行了融合。首先,我们使用A星算法在静态环境中规划机器人的初始路径。然后,当机器人在运动过程中遇到动态变化的环境时,我们通过DWA算法对机器人的速度进行实时调整,以应对障碍物的运动和环境的变化。通过将A星算法与DWA算法的优势结合起来,我们能够实现更加准确和高效的动态路径规划。
实验结果表明,基于A星与DWA算法融合的动态路径规划方法在静态避障和动态避障方面表现出了良好的性能。与单独使用A星算法或DWA算法相比,融合算法能够更好地适应复杂的环境和动态的障碍物运动,提供更加可靠和安全的路径规划结果。
综上所述,本文介绍了一种基于A星与DWA算法融合的动态路径规划方法。该方法既可以实现静态避障,又能够应对动态避障的需求。通过将A星算法和DWA算法的优势相结合,我们能够实现更加准确和高效的路径规划,为智能机器人在复杂环境中的应用提供了良好的解决方案。未来的研究中,我们将进一步探索算法的优化和改进,以提高路径规划的性能和适应性。
以上相关代码,程序地址:http://wekup.cn/745653542898.html
[详细] -->赞
踩

