
- 1安装ollama并部署大模型并测试_ollama 测试
- 2MATLAB求解微分方程_matlab解微分方程
- 3管理Windows/Mac混合环境的三个选项_域控管理的环境有macos怎么办
- 4【详讲】手把手带你 Typora+PicGoo 配置 gitee 图床_typora+gitee配置picgo图床
- 5算术逻辑单元 —— 串行加法器和并行加法器
- 6java xml transformer_Java xml出现错误 javax.xml.transform.TransformerException: java.lang.NullPointerExc...
- 7python哈希值与地址值_什么时候计算python对象的哈希值,为什么是-1的哈希值是不同的?...
- 8Linux学习系列(二十):在Linux系统中使用Git上传代码到GitHub仓库_linux github
- 9关于warp操作_warp+
- 10头歌MySQL数据库实训答案 有目录_头歌数据库答案mysql
FreeRTOS小项目实战------基于FreeRTOS和stm32的门禁系统_freertos项目_freertos项目案例
赞
踩
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。

需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
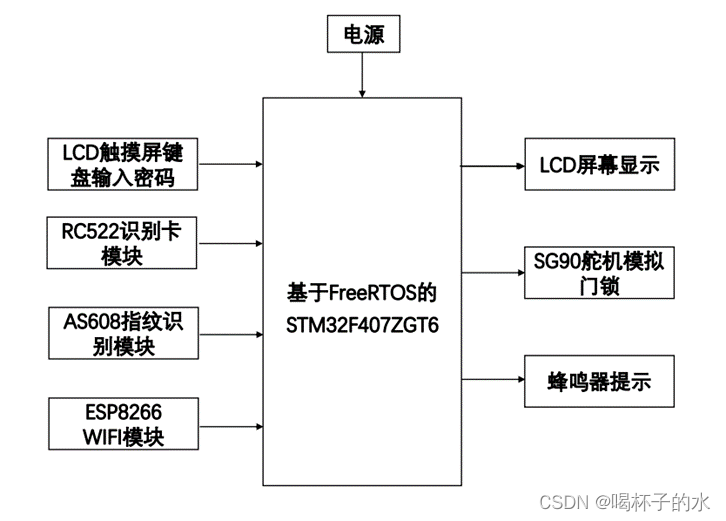
首先指纹模块提前采取好需要识别的指纹到模块内置的芯片里面,将手指放到指纹识别模块上,系统会检测到指纹按下并且会采取当前的指纹图像与芯片内部的指纹图像进行识别,若识别成功,蜂鸣器响两下,并且LCD屏幕会显示指纹识别成功,舵机会转动180°模拟解锁成功,当指纹识别到的图像与模块存储的指纹识别不一致,则蜂鸣器会响3下,LCD屏幕会显示指纹识别失败,舵机不会转动。RFID射频识别功能是当使用者使用识别卡靠近RC522 RFID射频模块,此模块会识别到当前卡的卡号,若卡号与我写入的卡号一致则解锁成功,并且LCD屏幕会显示识别卡成功,舵机会转动180°模拟解锁成功;LCD触屏密码锁的功能是当使用者在屏幕输入密码,密码正确则解锁成功,并且LCD屏幕会显示指纹识别成功,舵机会转动180°模拟解锁成功。WIFI远程解锁则是ESP8266模块设置成AP+TCP服务器端,手机连接其热点并且在TCP客户端输入正确ip地址和端口号,输入正确的命令后解锁成功。当每一次解锁失败则会记录下这一次解锁失败,当累计3次后则舵机锁死。
由基于FreeRTOS操作系统下创建了一个开始任务和四个控制任务。任务与任务之间使用事件标志组进行通信,当TFTLCD屏幕触屏输入密码的时,当密码输入正确,则向舵机任务发送一个事件标志位;当指纹识别成功时,则向舵机任务发送一个事件标志位;当射频识别卡识别成功卡号时候;则向舵机任务发送一个事件标志位;当蓝牙从手机串口发生密码时,当密码识别成功,则向舵机任务发送一个事件标志位。舵机任务只要接收到其中一个事件标志位时候,舵机就会转动180°来模拟解锁成功。当如果每解锁失败一次之后,err全局变量加一,当err等于3的时候,则舵机任务被挂起。
具体程序实现
创建事件组
EventGroupHandle_t EventGroupHandler; //事件标志组句柄
#define EVENTBIT_0 (1<<0) //事件位
#define EVENTBIT_1 (1<<1)
#define EVENTBIT_2 (1<<2)
#define EVENTBIT_ALL (EVENTBIT_0|EVENTBIT_1|EVENTBIT_2)
- 1
- 2
- 3
- 4
- 5
开始任务函数
//开始任务任务函数 void start_task(void *pvParameters) { BaseType_t xReturn; taskENTER_CRITICAL(); //进入临界区 EventGroupHandler=xEventGroupCreate(); if(NULL!=EventGroupHandler) printf("EventGroupHandler事件创建成功\r\n"); xReturn=xTaskCreate((TaskFunction_t )SG90_task, (const char* )"SG90_task", (uint16_t )SG90_STK_SIZE, (void* )NULL, (UBaseType_t )SG90_TASK_PRIO, (TaskHandle_t* )&SG90Task_Handler); if(xReturn==pdPASS) printf("SG90_TASK_PRIO任务创建成功\r\n"); xReturn=xTaskCreate((TaskFunction_t )LCD_task, (const char* )"LCD_task", (uint16_t )LCD_STK_SIZE, (void* )NULL, (UBaseType_t )LCD_TASK_PRIO, (TaskHandle_t* )&LCDTask_Handler); if(xReturn==pdPASS) printf("LCD_TASK_PRIO任务创建成功\r\n"); xReturn=xTaskCreate((TaskFunction_t )RFID_task, (const char* )"RFID_task", (uint16_t )RFID_STK_SIZE, (void* )NULL, (UBaseType_t )RFID_TASK_PRIO, (TaskHandle_t* )&RFIDTask_Handler); if(xReturn==pdPASS) printf("RFID_TASK_PRIO任务创建成功\r\n"); xReturn=xTaskCreate((TaskFunction_t )AS608_task, (const char* )"AS608_task", (uint16_t )AS608_STK_SIZE, (void* )NULL, (UBaseType_t )AS608_TASK_PRIO, (TaskHandle_t* )&AS608Task_Handler); if(xReturn==pdPASS) printf("AS608_TASK_PRIO任务创建成功\r\n"); xReturn=xTaskCreate((TaskFunction_t )ESP8266_task, (const char* )"ESP8266_task", (uint16_t )ESP8266_STK_SIZE, (void* )NULL, (UBaseType_t )ESP8266_TASK_PRIO, (TaskHandle_t* )&ESP8266Task_Handler); if(xReturn==pdPASS) printf("ESP8266_TASK_PRIO任务创建成功\r\n"); vTaskDelete(StartTask_Handler); //删除开始任务 taskEXIT_CRITICAL(); //退出临界区 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
舵机任务(利用舵机模拟门锁转动)
void SG90_task(void * pvParameters) { volatile EventBits_t EventValue; while(1) { EventValue=xEventGroupWaitBits(EventGroupHandler,EVENTBIT_ALL,pdTRUE,pdFALSE,portMAX_DELAY); printf("接收事件成功\r\n"); set_Angle(180); delay_xms(1000); delay_xms(1000); set_Angle(0); LCD_ShowString(80,150,260,16,16," "); vTaskDelay(100); //延时10ms,也就是10个时钟节拍 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
LCD触摸屏输入密码任务
void LCD_task(void * pvParameters) { // sg90flag=GET_NUM(); while(1) { if(sg90flag==1||GET_NUM()) { BEEP=1; delay_xms(100); BEEP=0; printf("密码输入正确\r\n"); LCD_ShowString(80,150,260,16,16,"password match"); xEventGroupSetBits(EventGroupHandler,EVENTBIT_0); } else { BEEP=1; delay_xms(50); BEEP=0; delay_xms(50); BEEP=1; delay_xms(50); BEEP=0; delay_xms(50); BEEP=1; delay_xms(50); BEEP=0; printf("密码输入错误\r\n"); LCD_ShowString(80,150,260,16,16,"password error"); err++; if(err==3) { vTaskSuspend(SG90Task_Handler); printf("舵机任务挂起\r\n"); LCD_ShowString(0,100,260,16,16,"Task has been suspended"); } } vTaskDelay(100); //延时10ms,也就是10个时钟节拍 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
rc522识别卡任务
void RFID_task(void * pvParameters) { // rfidflag=shibieka(); while(1) { if(rfidflag==1||shibieka()) { BEEP=1; delay_xms(100); BEEP=0; Chinese_Show_two(30,50,16,16,0); Chinese_Show_two(50,50,18,16,0); Chinese_Show_two(70,50,20,16,0); Chinese_Show_two(90,50,8,16,0); Chinese_Show_two(110,50,10,16,0); xEventGroupSetBits(EventGroupHandler,EVENTBIT_1); printf("识别卡号成功\r\n"); } else if(shibieka()==0) { BEEP=1; delay_xms(50); BEEP=0; delay_xms(50); BEEP=1; delay_xms(50); BEEP=0; delay_xms(50); BEEP=1; delay_xms(50); BEEP=0; Chinese_Show_two(90,50,12,16,0); Chinese_Show_two(110,50,14,16,0); printf("识别卡号失败\r\n"); err++; if(err==3) { vTaskSuspend(SG90Task_Handler); printf("舵机任务挂起\r\n"); LCD_ShowString(0,100,260,16,16,"Task has been suspended"); } } vTaskDelay(100); //延时10ms,也就是10个时钟节拍 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
as608指纹识别任务
void AS608_task(void *pvParameters) { while(1) { if(PS_Sta) //检测PS_Sta状态,如果有手指按下 { if(press_FR()==1) { BEEP=1; delay_xms(100); BEEP=0; Chinese_Show_two(30,25,0,16,0); Chinese_Show_two(50,25,2,16,0); Chinese_Show_two(70,25,4,16,0); Chinese_Show_two(90,25,6,16,0); Chinese_Show_two(110,25,8,16,0); Chinese_Show_two(130,25,10,16,0); xEventGroupSetBits(EventGroupHandler,EVENTBIT_2); printf("指纹识别成功"); } else if(press_FR()==0) **收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。**   **[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)** **需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)** **一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人** **都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!** mg-uW0xWQyj-1715786376564)] [外链图片转存中...(img-8hFfEiBP-1715786376564)] **[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)** **需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)** **一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人** **都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49


