3d gaussian splatting介绍整理_3d gaussian splatting翻译
赞
踩
3D 高斯分布是用于实时辐射场渲染的 3D 高斯分布中描述的一种光栅化技术,它允许实时渲染从小图像样本中学习到的逼真场景。
本文翻译整理自:
blog: Introduction to 3D Gaussian Splatting
DDPMs - Part 2
给出一些2D图片,用colmap得到稀疏 (SfM) 点,可重建出逼真的3D场景。
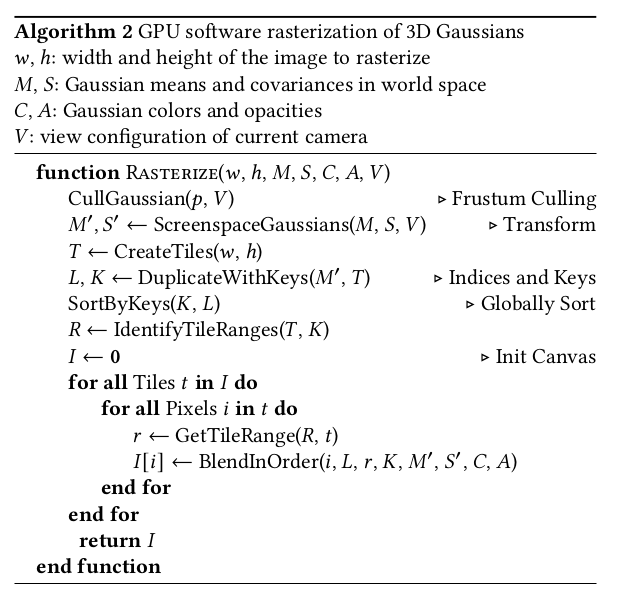
3DGS的核心是光栅化技术。
这类似于计算机图形学中的三角形光栅化,用于在屏幕上绘制许多三角形。
图片来自blog
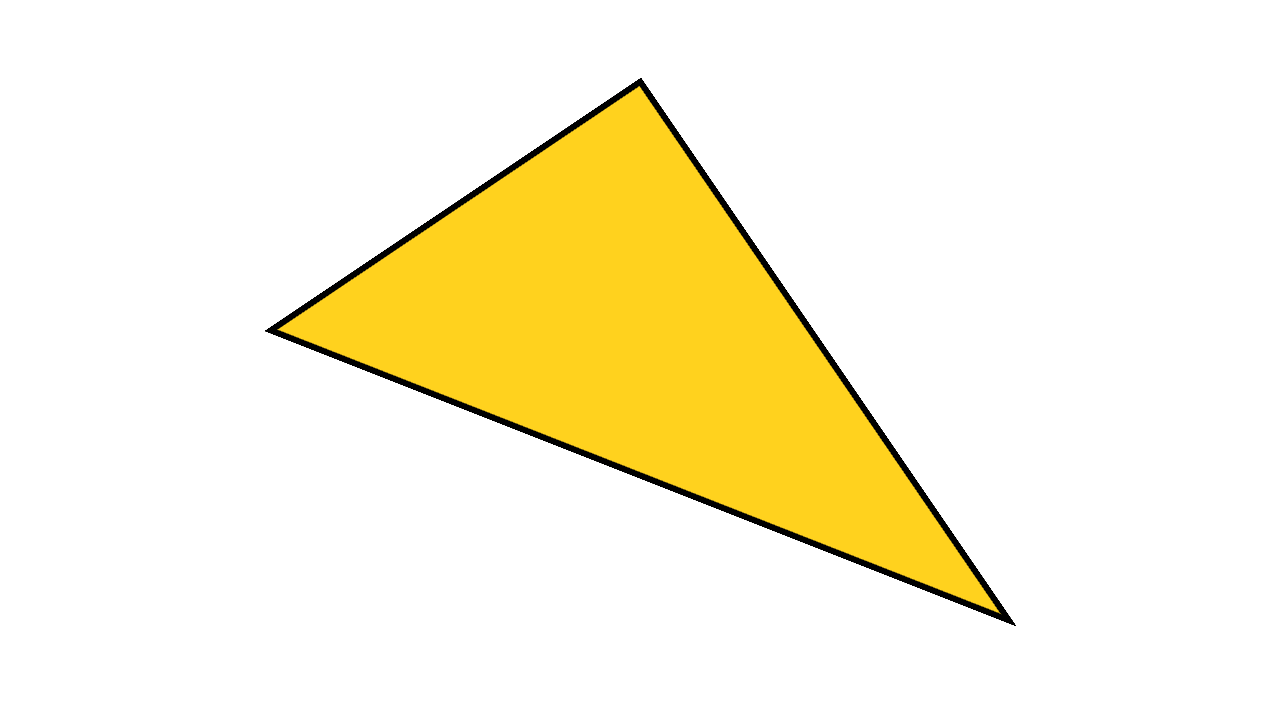
但是,它不是三角形,是高斯。
这里补充一些高斯相关:
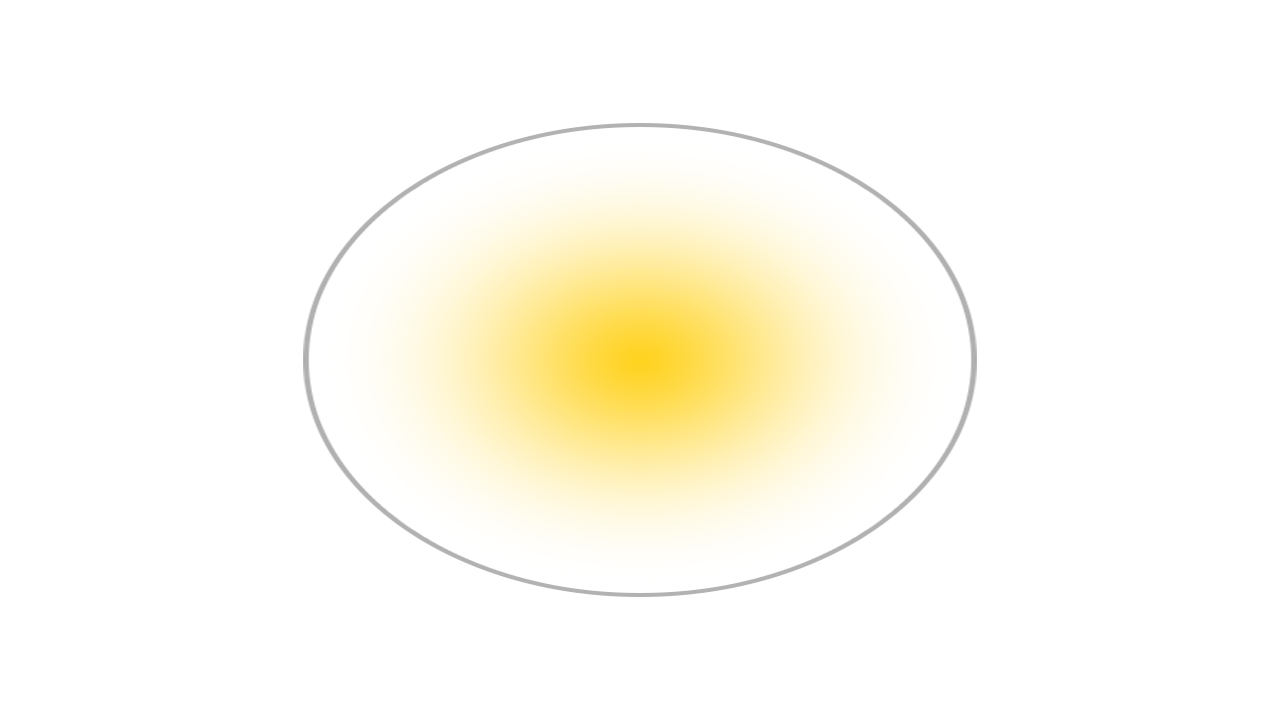
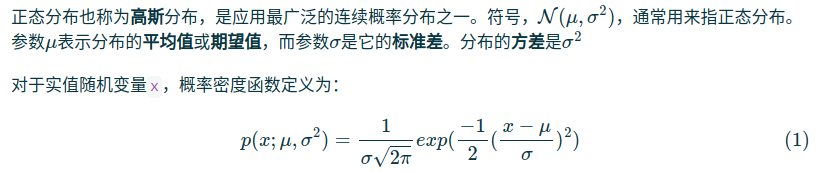
正态分布
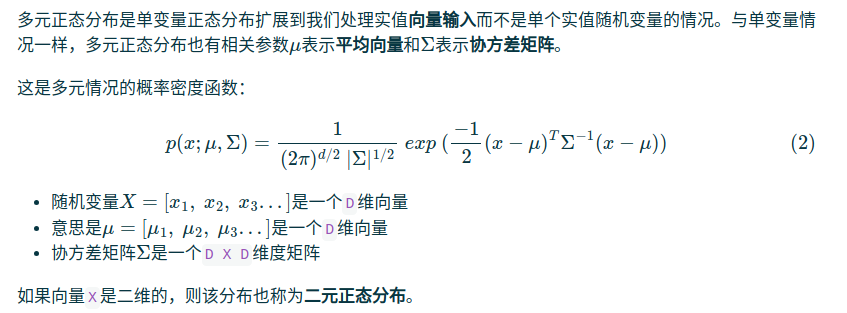
多元正态分布
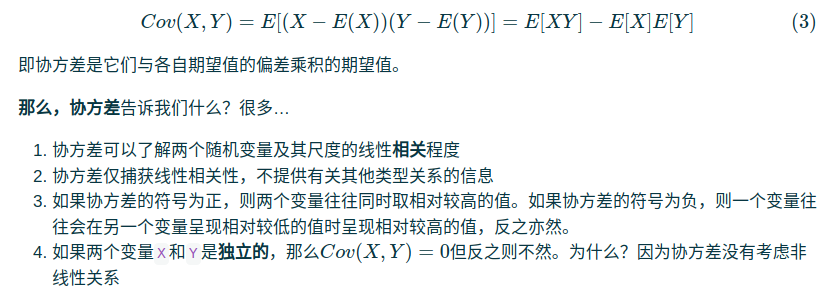
协方差
协方差矩阵
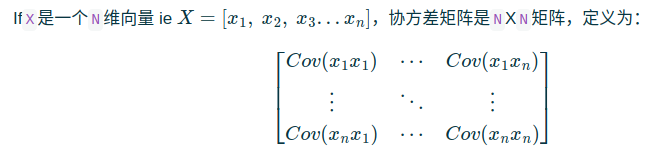
每个元素(i, j) 定义了向量的两个随机变量的协方差。
而且对角线上的元素

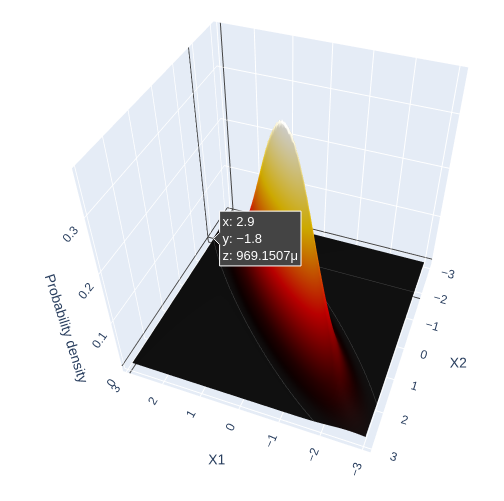
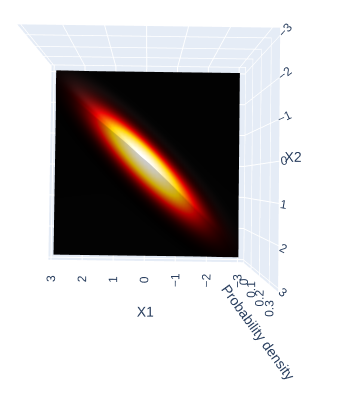
下面看下两个随机变量负协方差,0协方差,正协方差时的分布
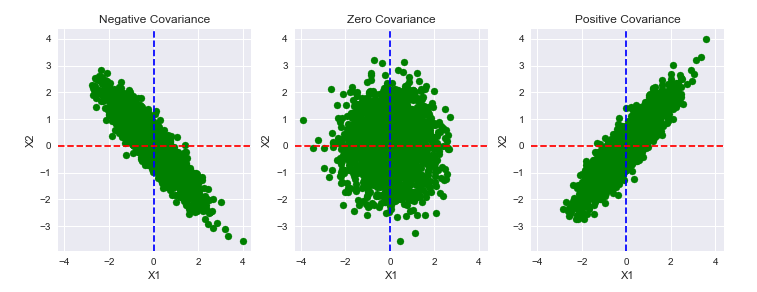
这是负协方差 3维看上去的效果,从顶上看就是上面的左图,从侧面看是高斯分布。45度更加平坦。
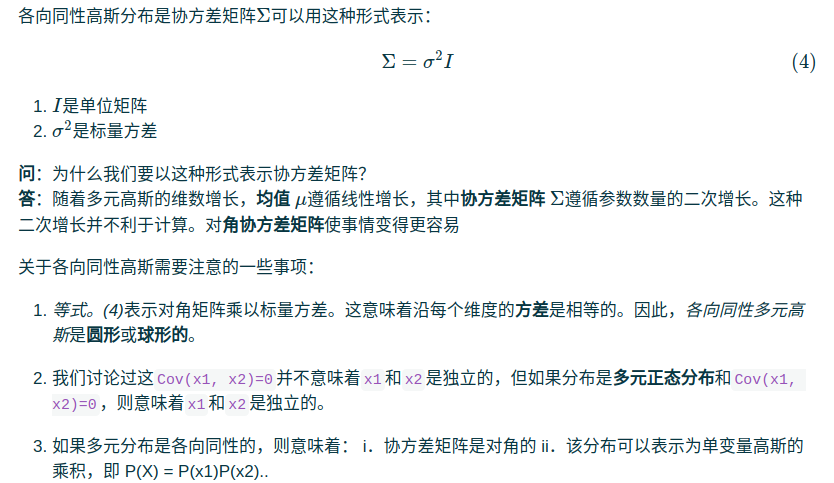
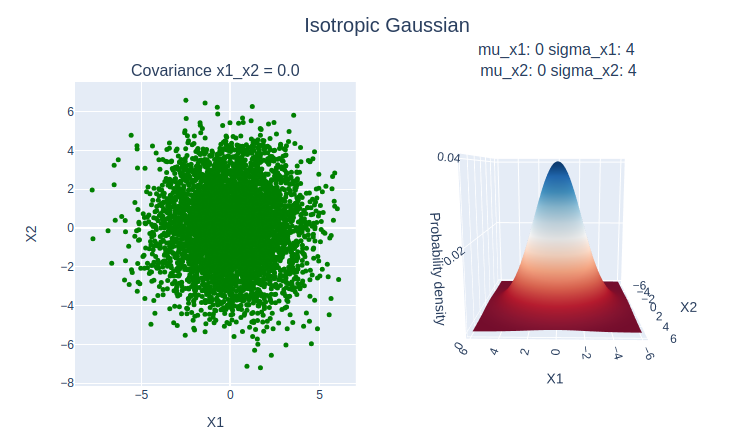
各向同性高斯
一个例子:
回到3D高斯,既然是3D,那就是3个变量(x, y, z)
它由以下参数描述:
位置:所在的位置 (XYZ)
协方差:如何拉伸/缩放(3x3 矩阵)
颜色:它是什么颜色(RGB)
Alpha : 透明度 (α)
3个的高斯叠加在一起的效果:
那么700万高斯叠加的效果呢。

运行步骤:
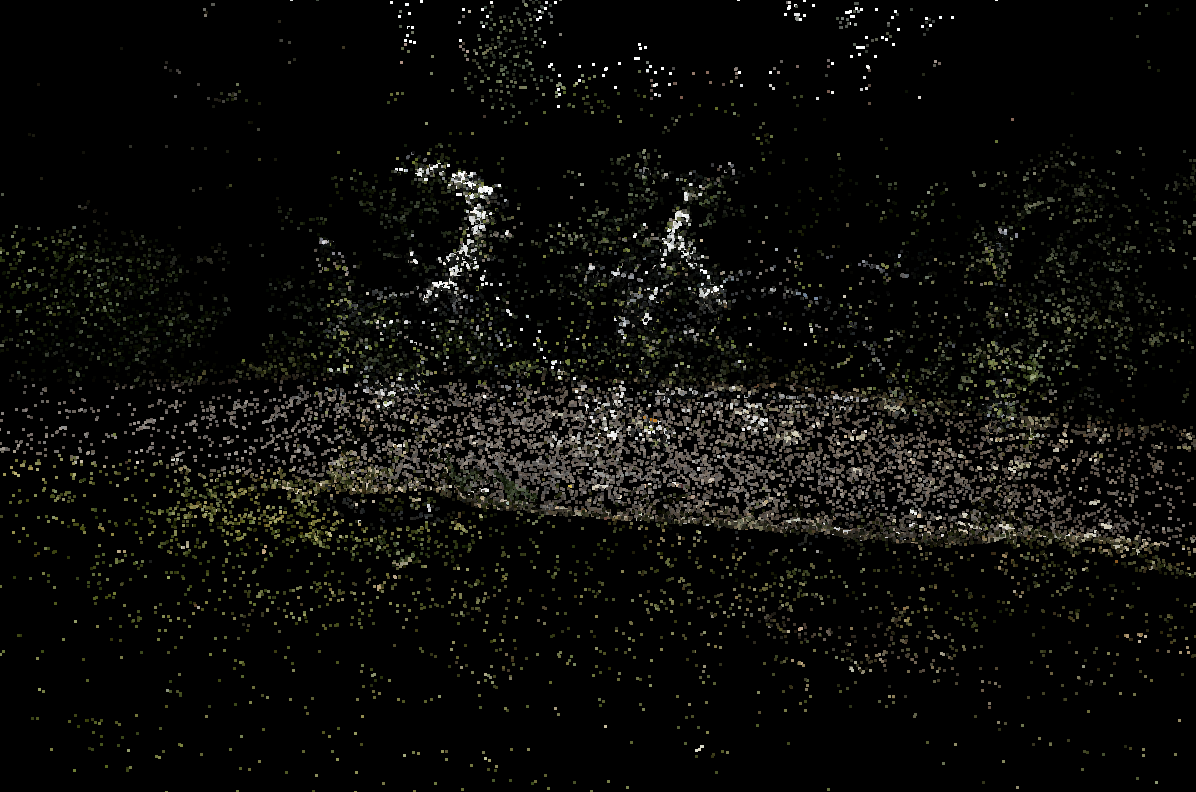
1.运动结构
第一步是使用运动结构 (SfM) 方法从一组图像中估计点云。这是一种从一组 2D 图像估计 3D 点云的方法。这可以通过COLMAP库来完成。
2.转换为高斯分布
接下来,每个点都转换为高斯分布。这对于光栅化来说已经足够了。然而,只能从 SfM 数据推断位置和颜色。为了学习产生高质量结果的表示,需要对其进行训练。
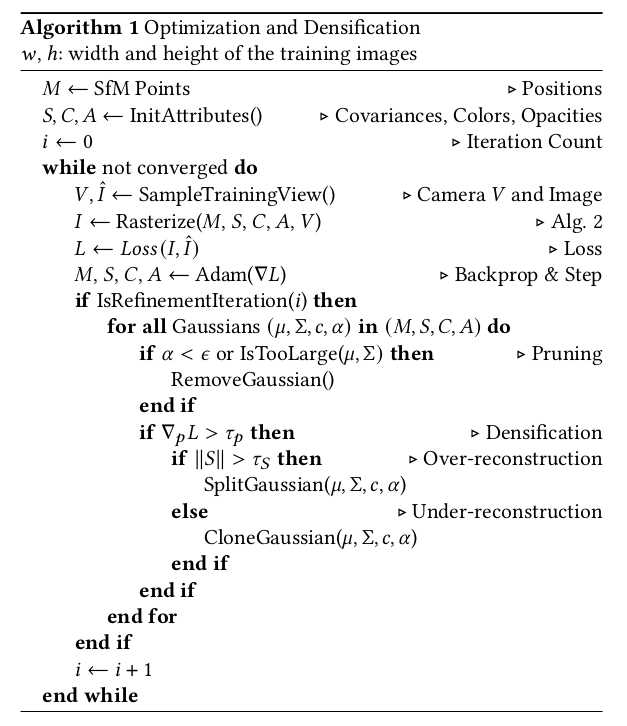
3.训练
训练过程使用随机梯度下降,类似于神经网络,但没有layers。训练步骤为:
使用可微分高斯光栅化将高斯光栅化为图像(稍后详细介绍)
根据光栅化图像和groud truth图像之间的差异计算损失
根据损失调整高斯参数
应用自动致密化和修剪
步骤 1-3 从概念上讲非常简单。第 4 步涉及以下内容:
如果对于给定的高斯梯度很大(即它太错误),则分割/克隆它
如果高斯很小,则克隆它
如果高斯很大,则将其分割
如果高斯的 alpha 太低,将其删除
此过程有助于高斯更好地拟合细粒度细节,同时修剪不必要的高斯。
4.可微分高斯光栅化
如前所述,3D 高斯分布是一种光栅化方法,它将数据绘制到屏幕上。
一些重要的元素还包括:
快速
可微分
光栅化涉及:
从相机角度将每个高斯投影为 2D。
按深度对高斯进行排序。
对于每个像素,从前到后迭代每个高斯,将它们混合在一起。
paper中描述了其他优化。