
- 1Java如何实现kafka所有指标监控_kafka 監控 java
- 2stm32之GP2Y1014AU使用_stm32gp2y1014
- 3pta编程题c语言答案,PTA选择题答案_pta题库答案,pta答案
- 4【教程】教你搭建控制台链接区块链网络,如何搭建FISCO-BCOS控制台_安装国密版控制台
- 5echoshop支付宝错误代码 ILLEGAL_PARTNER 调试错误,请回到请求来源地,重新发起请求_illegal partner
- 6经典排序之topK问题_topk查询不起作用
- 7QT---QLabel控件及其使用_qt让label出现
- 8web爬虫逆向笔记:js逆向案例三 有道翻译(MD5加密、AES解密)_有道翻译js逆向最新_爬虫js逆向web
- 9计算机专业毕业设计选题与方向走势_计算机毕业设计选题
- 10java 支付宝 第三方即时到账支付 接口
基于STM32的超声波测距(倒车雷达等)仿真+原理图+程序(完美运行)_stm32超声波模拟雷达
赞
踩
1 绪论
当前社会经济的不断发展和工业科学技术的不断提高,汽车已逐渐进入不少百姓家。汽车使用数量的不断增加,从而由此导致的倒车交通安全问题也非常严重,道路交通压力增加,交通安全问题也是面临严峻挑战。在面临如此严峻的交通安全问题,许多涉及安全问题的汽车辅助系统也纷纷现世。而本设计就是利用单片机知识、传感器知识等,进行的汽车防撞装置的设计,在汽车倒车时,这种装置可以在驾驶员对车尾与障碍物体的距离远近无法目测和判断时进行报警。
1.1 课题背景及意义
我国社会经济的不断发展,人们对汽车这种交通工具的依赖性也越来越大,导致了车辆的日益增加在给城市交通不断施加压力的同时,也引发了非常多行车的安全问题。一些由驾驶员反应不够迅速而导致的汽碰擦,还有很多时候是由于驾驶员对离障碍物的距离判断不准确而造成的,如果驾驶员能提前知道障碍物的存在并且知道障碍物的距离,那么驾驶员就能及时地采取措施,从而能避免事故的发生。因此,许多安全系统也应运而生,诸如为了避免交通事故发生的主动安全系统和在发生事故时的防护安全的被动安全系统,而主动安全系统对汽车交通事故的发生能起到避免的作用,所以,主动安全系统的研究更为重要。随着汽车数量的增加,停车场的数量也急剧增加,停车车辆密集,停车人多,所以汽车碰撞亦逐渐增多。而本设计的汽车防撞装置就是主动安全系统,通过对汽车与障碍物之间距离的提示报警避免汽车与障碍物之间的擦碰。本设计要求设计的汽车防撞装置能减少驾驶员的驾驶压力和判断错误,使驾驶员泊车倒车更加安全方便,本设计将对提高交通安全起到重要作用。
本设计基于单片机实现汽车防撞,将超声波测距和传感器联系在一起,利用单片机的实时控制和数据处理功能测量并显示汽车与障碍物之间的距离,并在不同距离利用蜂鸣器不同频率发出不同声音及时报警。这样驾驶员就能通过测距的显示甚至不同的声音来直接判断汽车玉障碍物之间的距离。本设计的设计简易,虽然精度不高,还不能测量过远的距离,但规模小,外围电路简单,调试也方便,成本也不高,器件更换容易,灵活性高,而且能完全满足驾驶员泊车时的需要,可以完全解除驾驶员在倒车过程中的顾虑和困扰,提高泊车的安全。
汽车防撞装置这种汽车安全辅助装置能大大减少汽车驾驶员在倒车的时候顾虑和对距离判断的失误,从而能够避免倒车的安全问题的发生,故此装置对于提高交通安全将起到重要的作用。所以,本课题所要求设计的基于单片机的汽车防撞装置将具有极大的现实意义和市场。
1.2 国内外研究现状
本汽车防撞装置包含有单片机控制电路、超声波测距传感器、蜂鸣器报警电路及数码管显示部件等,装置将各部件有机地结合起来,实现超声波测距及蜂鸣器报警提示的功能。
倒车雷达系统的开始是以蜂鸣器报警为标志的。汽车离障碍物距离越近,蜂鸣器报警声越急,蜂鸣器报警虽然使驾驶员知道有障碍物的存在,但却不能确定汽车车尾离障碍物有多远,所以,蜂鸣器报警对驾驶员帮助不是很大;之后一个质的飞跃就是液晶屏显示的出现,特别是液晶显示开始出现动态显示系统,驾驶员就是只要发动车辆,而且不用挂倒挡,液晶显示器上就会出现汽车图案以及汽车与周围的障碍物的距离,液晶显示是动态显示,液晶显示器的外表美观,显示的色彩也很清晰,而且可以直接粘贴在仪表盘上,安装也很方便[1]。不过由于液晶显示的灵敏度比较高,而且它的抗干扰能力也不是很强,所以误报的情况也较多。 现在市面上的魔幻镜倒车雷达应该算是比较先进的倒车雷达了,它结合了前几代产品的优点,并采用了最新仿生超声雷达技术,并用高速电脑控制,可全天准确地进行探测2 m以内的障碍物,并以不同的声音提示和直观的距离显示来提醒驾驶员;魔幻镜倒车雷达把后视镜、倒车雷达、免提电话、温度显示和车内空气温度显示等多项功能整合在一起[1],并设计了语音功能,因为其外形就是一块倒车镜 ,所以可以不占用车内空间,可以直接安装在车内倒视镜的位置,而且它样式种类繁多,可以按照个人需求和车内装饰选配,当然它的价格也是比较贵的[1]。最新的一代倒车雷达是整合影音系统,除了具备前几代倒车雷达的功能外还兼有影音系统[1]。
随着科学技术水平的迅速发展,相关电子技术也是飞跃前进,当然,汽车电子产业也得到飞速发展,电子产业的飞速发展使得车载电子安全产品有很大的发展前景。倒车雷达当然是每辆车必备的电子安全产品,如今市面上的主流的汽车倒车雷达基本都是以单片机芯片为控制核心的智能测距报警系统。这些的倒车雷达能够连续测距并显示汽车与障碍物之间的距离,而且采用蜂鸣器的不同频率的鸣叫声进行报警提示和距离显示提示,从而能够尽量不占用驾驶员的视觉空间[1]。此外,汽车电子系统的网络化的发展还要求作为汽车行驶安全辅助系统的倒车雷达要具有通信功能,并能够把数据发送到汽车总线上去[2]。
就目前市面上的产品来讲,目前的汽车倒车雷达主要是具备数码管或者液晶屏的距离显示并且带有蜂鸣器的语音报警为主的汽车安全系统。这些系统主要采用的是以单片机为控制核心的智能超声波测距传感器和蜂鸣器报警系统,这种汽车安全辅助系统便宜耐用,而且达到了汽车电子系统网络化的发展需求。
1.3 课题研究内容及章节安排
本文所介绍的超声波测距报警系统在测距的时候采用的是两个超声波探头分别进行超声波发射和接收来进行距离的测量的。本设计的汽车防撞系统能测量出倒车方向的障碍物与汽车之间的距离, 并通过数码管显示单元模块显示两者之间的距离,然后通过蜂鸣器发出不同频率的声响, 从而起到提示和报警的作用。本系统利用一片89Sstm32单片机对超声波信号循环不断地进行采集。系统包括超声波测距单元(超声波集成模块)、89Sstm32单片机控制、蜂鸣器报警模块和数码管显示模块。这个设计的汽车倒车雷达要能够连续测距,数据经过单片机的处理后,用4位数码管显示所测量得到的距离,并利用不同频率使蜂鸣器发出不同的鸣叫声进行语音报警。
论文构成主要由以下部分组成:
第1章主要介绍了本课题的背景意义和相关技术在国内外的研究现状。
第2章介绍的是汽车防装系统的总体方案设计。首先介绍汽车防撞系统的设计要求,然后分别对测距传感器的选择和显示报警系统的方案设计做了介绍,最后提出本系统的总体的设计方案,为硬件系统的设计打下了基础。
第3章对硬件系统的设计进行了介绍。首先对超声波传感器的工作原理进行了分析,然后具体讨论了超声波测距模块中的超声波发射电路和超声波接收电路的硬件设计,最后介绍了显示模块电路和蜂鸣器报警电路的设计。
第4章主要是对系统的软件设计进行了介绍。在软件设计中采用不同模块不同编程进行设计的,本设计分别对系统的主程序模块、中断子程序模块、超声波测距模块、蜂鸣器报警模块和数码管的显示模块的各个程序进行了设计。
第5章是硬件的组装及其性能进行分析。首先对实物进行硬件排版组装和焊接,然后讨论了系统的性能产生的误差。
第6章是对本设计的总结和展望。最后一章对全文进行了总结,并指明了系统设计的不足之处,最后也对本系统的倒车雷达报警系统的发展前景进行了展望。
2 总体方案论证
本章从系统方案等一些方面来进行论证。本设计主要是进行距离的测量和报警,设计中涉及到的内容较多,主要是将单片机控制模块、超声波测距模块、蜂鸣器报警模块、4位数码管显示模块这几个模块结合起来。而本设计的核心是超声波测距模块,其他相关模块都是在测距的基础上拓展起来的,测距模块是利用超声波传感器,之后选择合适单片机芯片,以下就是从相关方面来论述的。
2.1 设计方案论证
2.1.1 测距传感器
(1)激光测距传感器
激光传感器利用激光的方向性强和传光性好的特点,它工作时先由激光传感器对准障碍物发射激光脉冲,经障碍物反射后向各个方向散射,部分散射光返回到接受传感器,能接受其微弱的光信号,从而记录并处理光脉冲发射到返回所经历的时间即可测定距离,即用往返时间的一半乘以光速就能得到距离。其优点是测量的距离远、速度快、测量精确度高、量程范围大,缺点是对人体存在安全问题,而且制作的难度大成本也比较高[3]。
(2)红外线测距传感器
红外线测距传感器利用的就是红外线信号在遇到障碍物其距离的不同则其反射的强度也不同,根据这个特点从而对障碍物的距离的远近进行测量的。其优点是成本低廉,使用安全,制作简单,缺点就是测量精度低,方向性也差,测量距离近[3]。
(3)超声波传感器
超声波是一种超出人类听觉极限的声波即其振动频率高于20 kHz的机械波。超声波传感器在工作的时候就是将电压和超声波之间的互相转换,当超声波传感器发射超声波时,发射超声波的探头将电压转化的超声波发射出去,当接收超声波时,超声波接收探头将超声波转化的电压回送到单片机控制芯片。超声波具有振动频率高、波长短、绕射现象小而且方向性好还能够为反射线定向传播等优点,而且超声波传感器的能量消耗缓慢有利于测距[4]。在中、长距离测量时,超声波传感器的精度和方向性都要大大优于红外线传感器,但价格也稍贵。从安全性,成本、方向性等方面综合考虑,超声波传感器更适合设计要求。
根据对以上三种传感器性能的比较,虽然能明显看出来激光传感器是比较理想的选择,但是它的价格却比较高,而且安全度不够高。而且汽车在行驶的过程中超声波传感器测距时应具有较强的抗干扰能力和较短的响应时间,因此选用超声波传感器作为此设计方案的传感器探头。
2.2 系统方案
此方案选择stm32单片机作为控制核心,所测得的距离数值由4位共阳极数码管显示,与障碍物之间的不同距离利用蜂鸣器频率的不同报警声提示,超声波发射信号由stm32单片机的P0.1口送出到超声波发射电路,将超声波发送出去,超声波接收电路由CX20106A芯片和超声波接收探头组成的电路构成,报警系统由蜂鸣器电路构成。本设计中将收发超声波的探头分离这样不会使收发信号混叠,从而能避免干扰,可以很好的提高系统的可靠性。本设计的汽车防撞装置的系统框图如图2.1所示。
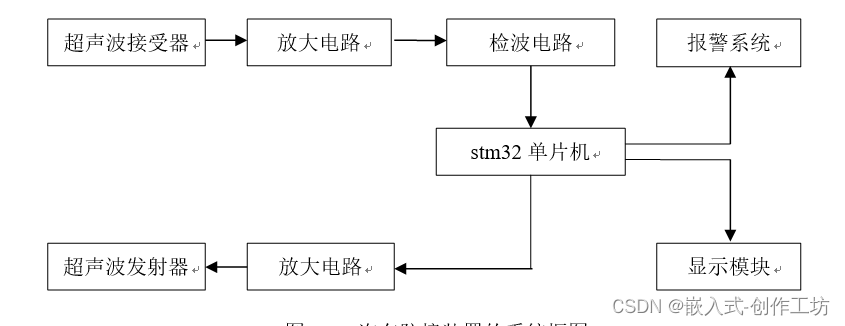
图2.1 汽车防撞装置的系统框图
本设计由Keil编程软件对stm32单片机进行编程,stm32单片机在执行程序后由P0.1端口产生40kHz的脉冲信号通过74LS04电路进行放大并送到到超声波发射探头,产生超声波。在超声波发射电路启动的同时单片机启动中断定时器,利用其计数的功能记录超声波发射超声波到接收到超声波回波的时间。当接收回射的超声波时,接收电路的输出端产生负跳变输出到单片机产生中断申请,执行外部中断子程序计算距离。
结合各方面的因素考虑,依据设计的要求,查阅相关数据资料,选择了超声波测距传感器TR40-16Q(其中T表示超声波发射探头,R表示超声波接收探头),综合考虑设计的要求出于简便角度,选用了HC-SR04超声波集成模块。此超声波模块的最大探测距离为5 m,精度可以达到0.3 cm,盲区为2 cm,而且发射扩散角不大于15°,更有利于测距的准确性。而且,此模块的工作频率范围为39 kHz~41 kHz左右,完全能在40 kHz工作频率工作。
由于超声波的发射和接收是分开发送和接收的,所以发射探头和接收探头必须在同一条水平行直线上,这样才能准确地接收反射的回波。而由于测量的距离不同和发射扩散角所引起的误差以及超声波信号在空气中传播的过程中的超声波衰减问题,发射探头和接收探头距离不可以太远,而且还要避免发射探头对接收探头在接收信号时产生的干扰,所以二者又不能靠得太近。根据对相关资料查阅,将两探头之间的距离定在5 cm~8 cm最为合适。本设计所用的HC-SR04模块的超声波探头之间的距离大约在6 cm左右。
3 硬件电路设计
本设计的汽车防撞装置由stm32单片机、超声波发射探头、超声波接收探头、4位共阳极数码管、蜂鸣器组成。汽车防撞系统的测距是利用超声波测距的原理,在单片机内部程序的控制下,由超声波发射探头发射超声波,在超声波遇到障碍物时反射到超声波接收探头,由此回应到单片机,由单片机进行中断处理和数据的处理,计算出距离,由数码管显示距离,并由蜂鸣器报警提示。本设计的硬件电路分为五部分:单片机最小系统、超声波发射和接收电路、蜂鸣器报警电路和数码管显示电路。
3.1 单片机系统设计
3.1.1 单片机的选择
一般在系统的设计当中,能否完成设计任务最重要的就在于系统的核心器件是否选择合适,而单片机更是是系统控制的核心,所以对单片机的选择更是异常重要。如果选择了一个合适的单片机不仅可以最大地简化系统的操作,而且其功能可能是最好的,可靠性也比较高,对整个系统来说更方便。目前,市面上的单片机的种类繁多,并且他们在功能方面也是各自有各自的特点。在一般的情况下来讲,在选择单片机时要需要考虑的几个方面有[5]:
(1)单片机最基本性能参数指标。例如:执行一条指令的速度、程序存储器的容量,I/O口的引脚数量等。
(2)单片机的某些增强的功能。
(3)单片机的存储介质。例如:对于程序存储器来说,最好选用的是Flash的存储器。
(4)单片机的封装形式。封装的形式多种多样,例如:双列直插封装、PLCC封装及表面贴附等。
(5)单片机对工作的温度范围的要求。例如:在进行设计户外的产品时,就必须要选用工业级的芯片,以达到温度范围的要求。
(6)单片机的功耗。例如,如果信号线取电只能提供几mA的电流,所以为了能满足低功耗的要求这个时候选用STM32的单片机是最合适的。
(7)单片机在市面上的销售渠道是否畅通、其价格是否便宜。
(8)单片机技术的支持网站如何,卖家提供的芯片资料是否足够完善,是否包含了用户手册,设计方案举例,相关范例程序等。
(9)单片机的保密性是否很好,单片机的抗干扰的性能如何等。
stm32系列单片机它在指令系统、硬件结构和片内资源等方面与标准的52系列的单片机可以完全的兼容。stm32系列的单片机执行速率快(最高时钟频率为90 MHz),功耗低,在系统、在应用可编程,不占用用户的资源[5]。根据本系统设计的实际要求,选择AT89Sstm32单片机做为本设计的单片机使用,它是由ATMEL公司生产的高性能、低功耗的CMOS 8位单片机。89Sstm32单片机具有以下几个性能特点:4 k字节的闪存片内程序存储器,128字节的数据存储器,32个外部输入和输出口,2个全双工串行通信口,看门狗电路,5个中断源,2个16位可编程定时计数器,片内震荡和时钟电路且全静态工作并由低功耗的闲置和掉电模式[5]。
单片机的引脚功能图如图3.1所示及最终实现的效果如下。
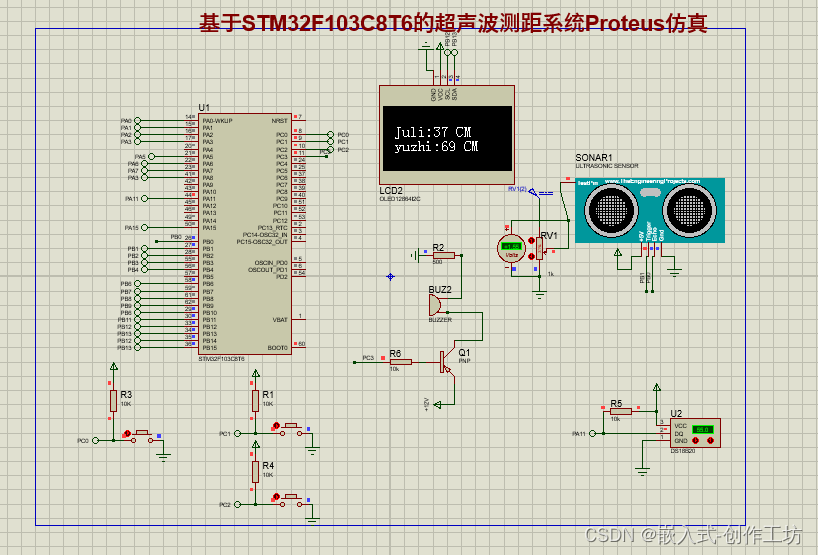
项目实现功能(仿真也可以实现):
1、测距在OLED上显示;
2、可设定测定阈值;
3、当高于设定的阈值时,系统报警,否则报警解除
程序及源代码及PCB原理图下载链接:02基于stm32超声波仿真系统系统(程序源码+仿真+论文)项目资源-CSDN文库

