
- 1Git推送到远程仓库失败的解决方法_无法推送到远程仓库,因为本地分支在远程分支的后面
- 2微信小程序后台开发详解_微信程序开发
- 311个问题,帮你彻底搞懂工业互联网
- 4hbase jps没有hmaster和hregionsever 报zookeeper.ClientCnxn:java.net. ConnectException:拒绝连接_hbase的jps没有hquorumpeer
- 5kaggle竞赛实战8——其他方案之XGBOOST及NLP特征优化
- 6全网最全Kimi使用指南,一文看懂Kimi效率提升60%!_kimi 使用经验
- 7Docker系列(1)安装Linux系统编译Android源码
- 8【Spark】Spark是什么?能干什么?有什么特点?_spark 作用
- 9利用Android Studio 上传项目到 github_android studio上传github
- 10HBase表预分区与压缩
手把手教你写stm32f103智能风扇_c语言控制风扇转速的方法stm32
赞
踩
1.系统实现目标
本系统可以分为两个模式来进行运行,分别为手动模式和自动模式,同时,在上电进入系统后,还会有一个模式选择的界面产生。
- 模式选择:在此界面中,可以通过按键K1来控制模式选择,两个模式分别为手动模式和自动模式;通过按键K2可以进入模式。
- 手动模式:在手动模式中,可以通过K1来进行速度调整,分为低速、中速和高速,可以通过K3来控制是否为摇头状态。
- 自动模式:在自动模式下,可以通过红外传感器来检测周围是否有人,通过温湿度传感器来测试周围环境温度和湿度,若达到条件就会触发风扇进行运转,风速也有低速模式、中速模式、高速模式。
所有没写出的代码都太长,所以都在链接里面,可以自己下载,积分都设置为0了.
2.硬件选型和软件准备
2.1.硬件选型
1.最小系统板
这次项目使用的板子是stm32f103c8t6最小系统板,这个板子在tb上都能够买到,随便一个最小系统板都可以。

2.显示模块
显示模块是使用的0.96英寸的OLED屏幕,注意是使用的IIC通信协议的OLED屏幕,不是使用SPI总线协议的。买的时候要看清楚。
3.温度传感器
温湿度传感器使用的是DHT11温湿度传感器,用来采集环境的温湿度,最主要是用来采集温度。

4.红外模块
红外模块是用来检测风扇前是否有人的。

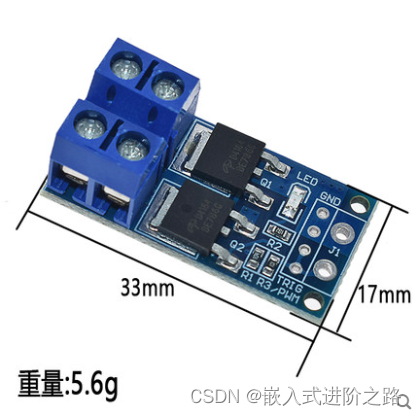
5.电机驱动模块
本次实验用的电机驱动模块是使用的大功率MOS管。
6.舵机
舵机这个元器件主要是用来实现风扇摆头这个功能。

7.电机
这次的电机是使用的空心杯这个电机,转速快,功率小。

以上的元件就是这次项目用到的主要元器件。
2.2.软件准备
当我们把所有的硬件都准备完活以后,就要开始编写软件代码,编写软件代码之前,需要进行软件环境的准备,如果没有软件环境,我把软件环境放在了以下连接中:
https://download.csdn.net/download/nbbskk/87239099
3.硬件的连接电路
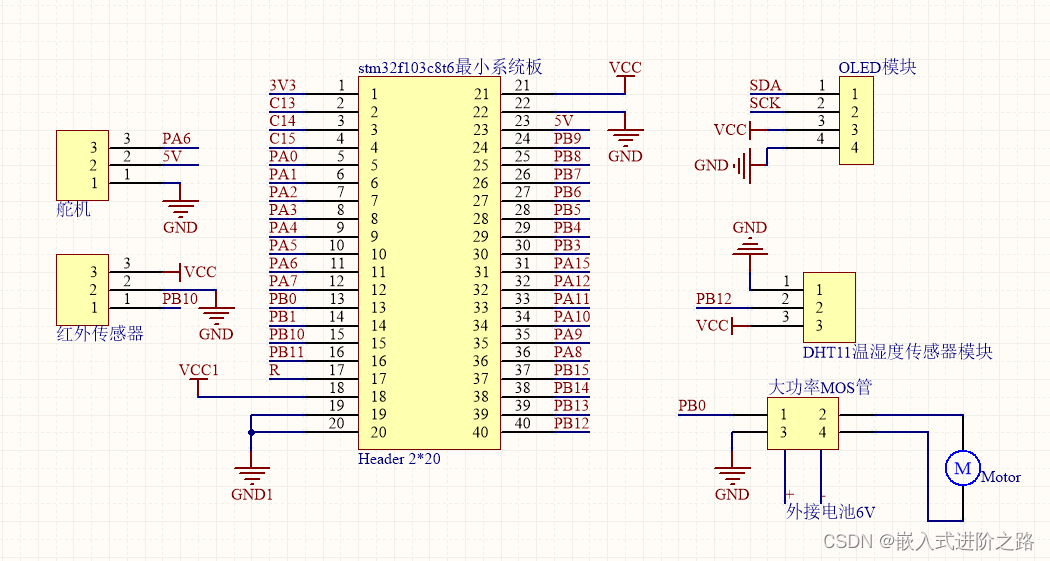
硬件的连接电路如上
其中大功率MOS管需要注意,需要外接电源,不能使用单片机提供的5V引脚,因为如果这个mos管直接连接单片机中的5V引脚的话,就会造成程序的崩溃。
4.各个模块的驱动程序
4.1.红外传感器的驱动程序
红外传感器模块主要是用来检测前方是否有人存在,主要是用在自动模式下的。
.c文件
#include "stm32f10x.h" // Device header
void Infrared_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
// GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
//PB10口来检测红外避障模块的功能,如果检测到障碍物返回1,未检测到障碍物返回2
uint16_t Get_Sign(void)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)==0)
{
return 1;
}
else
{
return 2;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
.h文件
#ifndef __INFRARED_H
#define __INFRARED_H
void Infrared_Init(void);
uint16_t Get_Sign(void);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4.2.DHT11温湿度传感器的驱动程序
DHT11温湿度传感器主要是用来检测环境温度的。
.c文件
#include "stm32f10x.h" // Device header
#include "dht11.h"
#include "oled.h"
#include "delay.h"
extern uint8_t dat[5];
void dht11_package_show(void)//DHT11显示模式打包
{
//显示温度和湿度字符
OLED_ShowChinese(10,0,9,16,1);
OLED_ShowChinese(26,0,8,16,1);
OLED_ShowString(42,0,":",16,1);
OLED_ShowChinese(10,16,10,16,1);
OLED_ShowChinese(26,16,8,16,1);
OLED_ShowString(42,16,":",16,1);
OLED_Refresh();
if(DHT_Read())
{
//显示湿度
OLED_ShowNum(52,16,dat[0],2,16,1);
OLED_ShowString(70,16,"%",16,1);
// OLED_ShowNum(50,0,dat[1],5,16,1);
//显示温度
OLED_ShowNum(52,0,dat[2],2,16,1);
OLED_DrawPoint(70,12,1);
OLED_ShowNum(74,0,dat[3],1,16,1);
OLED_Refresh();
delay_ms(10);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
.h文件
#ifndef __DHT11_PACKAGE_H
#define __DHT11_PACKAGE_H
void dht11_package_show(void);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
4.3.OLED显示模块
OLED显示模块主要是用来显示和调试用的
OLED显示程序包括字库程序太大,放到以下连接中去下载。
https://download.csdn.net/download/nbbskk/87238933
4.4.舵机的驱动
舵机主要是用在切换风扇扫风和不扫风模式的
.c文件
#include "stm32f10x.h" // Device header
void SG90_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitTypeDefStrucutre;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6 ;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_InternalClockConfig(TIM3);//选择内部时钟
//时基单元配置
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=20000-1; //ARR自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=72-1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
//输出比较器初始化
TIM_OCInitTypeDefStrucutre.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitTypeDefStrucutre.TIM_OCPolarity= TIM_OCPolarity_High;
TIM_OCInitTypeDefStrucutre.TIM_OutputState= TIM_OutputState_Enable ;
TIM_OCInitTypeDefStrucutre.TIM_Pulse=0; //CCR
TIM_OC1Init(TIM3, &TIM_OCInitTypeDefStrucutre);
TIM_Cmd(TIM3,ENABLE);
}
void setccr(uint16_t crrnum)
{
TIM_SetCompare1(TIM3,crrnum);//设置舵机的旋转,舵机旋转的crrnum最大为2500,最小为500
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
.h文件
#ifndef __SG90_H
#define __SG90_H
void SG90_Init(void);
void setccr(uint16_t crrnum);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
4.5.电机的驱动
电机用来充当风扇
.c文件
#include "stm32f10x.h" // Device header
void key_PWM_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitTypeDefStrucutre;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//你
GPIO_Init(GPIOB,&GPIO_InitStructure);
TIM_InternalClockConfig(TIM3);//选择内部时钟
//时基单元配置
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=20000-1; //ARR自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=72-1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
//输出比较器初始化
TIM_OCInitTypeDefStrucutre.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitTypeDefStrucutre.TIM_OCPolarity= TIM_OCPolarity_High;
TIM_OCInitTypeDefStrucutre.TIM_OutputState= TIM_OutputState_Enable ;
TIM_OCInitTypeDefStrucutre.TIM_Pulse=0; //CCR
TIM_OC3Init(TIM3, &TIM_OCInitTypeDefStrucutre);
TIM_Cmd(TIM3,ENABLE);
}
void setccr3(uint16_t crrnum3)
{
TIM_SetCompare3(TIM3,crrnum3);//设置风扇的转速
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
.h文件
#ifndef __KEY_PWM_H
#define __KEY_PWM_H
void key_PWM_Init(void);
void setccr3(uint16_t crrnum3);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
5.不同的工作模式
5.1.选择模式
当各个模块的驱动程序写好以后,就可以进行模式的选择了,通过对手动模式和自动模式的选择来进入到不同的模式当中。
模式选择功能的实现主要是通过按键和标志位来进行实现的,这个项目是通过四个按钮来进行控制的。
其中,当在模式选择界面的时候,需要两个按钮,分别接到GPIOA_2和GPIOA_3上,一端接低电平,另一端接IO口。
选择模式是通过以下的代码来实现的
show_words3();//显示选择界面
option();//进行模式选择
if(flago==0)//显示手动模式
{
OLED_ShowChinese(50,30,4,16,1);
OLED_ShowChinese(66,30,5,16,1);
OLED_Refresh();
}
else if(flago==1)//显示自动模式
{
OLED_ShowChinese(50,30,6,16,1);
OLED_ShowChinese(66,30,5,16,1);
OLED_Refresh();
}
action();//接收进入模式信息
if(flago==0&&go==1)//进入手动模式
{
manual_mode_Init();//手动模式初始化
while(1)
{
// manual_go();
if(flag_go2==0) //进入循环后,未按下按键跳回选择界面
{
manual_go();//进入手动模式
}
else if(flag_go2==1)//跳出循环界面
{
OLED_Clear();
flago=0;
go=0;
flag_go2=0;
break;
}
}
}
else if(flago==1&&go==1)//进入自动模式
{
auto_mode_Init();//自动模式初始化
while(1)
{
// auto_go();
if(flag_go2==0)
{
auto_go();
}
else if(flag_go2==1)
{
OLED_Clear();
flag_go2=0;
flago=1;
go=0;
break;
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
其中单片机上电以后就会进入模式选择界面,通过option函数来实现手动模式和自动模式的选择,此时液晶屏上会显示是手动模式还是自动模式。
option函数通过以下代码来实现的
//给PA2输入低电平进行模式的选择
void option(void)
{
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==0)
{
delay_ms(30);
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==0)
{
delay_ms(30);
u++;
flago=u%2;
}
}
// return flago;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
option函数主要是通过连接到PA2口的按钮来实现的。
当选择到合适的模式的时候,那么就通过action函数来进入这个模式。
action函数是由以下程序来实现的
//给PA3输入低电平,进入此模式
void action(void)
{
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_3)==0)
{
delay_ms(30);
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_3)==0)
{
delay_ms(30);
go=1;
}
}
// return go;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
主要是通过PA3口来控制进入。
5.2.手动模式
进入手动模式以后,主要就是通过按钮来实现风扇是否扫风、风扇转速控制主要是通过PA2口的按钮和PB11口的按钮来实现。
- 当PA2口的按钮按下后,可以实现停止->低速->中速->高速->停止的切换,如此可以进行循环,这一步并没有加上减速的操作,是为了降低按钮的使用量。
- 当PB11口的按钮按下以后,可以实现扫风和不扫风的切换。
- 同时如果按下PA8口的按键的话,程序就会跳回选择模式的界面。
手动模式是由以下程序来实现的
uint16_t mo=0;
uint16_t deg=0;
uint8_t flags_it=0;
void manual_mode_Init(void)
{
key_PWM_Init();
add_init();
delay_init();
OLED_Init();
key_it_Init();
SG90_Init();
setccr(1500);
//显示风速两个字
OLED_ShowChinese(20,0,12,16,1);
OLED_ShowChinese(36,0,7,16,1);
OLED_ShowString(51,0,":",16,1);
OLED_Refresh();
}
void manual_go(void)
{
uint16_t i=0;
flags_it=Get_key_it_flag();//得到是否让风扇转动信号
// mo=add_sub1 ();
// OLED_ShowNum(40,0,flags_it,2,16,1);
if(flags_it==1)//进入扫风的模式
{
//如果扫风,显示扫风模式四个字
OLED_ShowChinese(22,25,11,16,1);
OLED_ShowChinese(38,25,12,16,1);
OLED_ShowChinese(54,25,0,16,1);
OLED_ShowChinese(70,25,1,16,1);
OLED_Refresh();
//正向扫风
for(i=500;i<2500;i+=100)
{
mo=add_sub1 ();//控制风扇转速
flags_it=Get_key_it_flag();
if(flags_it==0)
{
break;
}
mo=add_sub1 ();//控制风扇的转速
deg=mo*830;
setccr3(deg);//设置风扇转速
setccr(i);
delay_ms(100);
mo=add_sub1 ();
if(mo==0)
{
//显示停止两个字
OLED_ShowChinese(58,0,16,16,1);
OLED_ShowChinese(74,0,17,16,1);
OLED_Refresh();
}
else if(mo==4)
{
//显示低速两个字
OLED_ShowChinese(58,0,13,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
else if(mo==8)
{
//显示中速两个字
OLED_ShowChinese(58,0,14,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
else if(mo==12)
{
//显示高速两个字
OLED_ShowChinese(58,0,15,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
// OLED_ShowNum(0,0,mo,2,16,1);
// OLED_ShowNum(20,0,i,2,16,1);
// OLED_ShowNum(0,16,deg,6,16,1);
// OLED_Refresh();
}
//反向扫风
for(i=2500;i>500;i-=100)
{
mo=add_sub1 ();
flags_it=Get_key_it_flag();
if(flags_it==0)
{
break;
}
mo=add_sub1 ();
deg=mo*830;
setccr3(deg);
setccr(i);
delay_ms(100);
mo=add_sub1 ();
if(mo==0)
{
OLED_ShowChinese(58,0,16,16,1);
OLED_ShowChinese(74,0,17,16,1);
OLED_Refresh();
}
else if(mo==4)
{
OLED_ShowChinese(58,0,13,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
else if(mo==8)
{
OLED_ShowChinese(58,0,14,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
else if(mo==12)
{
OLED_ShowChinese(58,0,15,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
// OLED_ShowNum(0,0,mo,2,16,1);
// OLED_ShowNum(20,0,i,2,16,1);
// OLED_ShowNum(0,16,deg,6,16,1);
// OLED_Refresh();
}
}
else if(flags_it==0)//风扇不扫风
{
OLED_ShowString(22,25," ",16,1);
OLED_Refresh();
mo=add_sub1 ();
deg=mo*830;
setccr3(deg);
if(mo==0)
{
OLED_ShowChinese(58,0,16,16,1);
OLED_ShowChinese(74,0,17,16,1);
OLED_Refresh();
}
else if(mo==4)
{
OLED_ShowChinese(58,0,13,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
else if(mo==8)
{
OLED_ShowChinese(58,0,14,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
else if(mo==12)
{
OLED_ShowChinese(58,0,15,16,1);
OLED_ShowChinese(74,0,7,16,1);
OLED_Refresh();
}
// OLED_ShowNum(0,32,mo,6,16,1);
// OLED_ShowNum(0,48,deg,6,16,1);
// OLED_Refresh();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
5.3.自动模式
自动模式我设计的比较复杂。
- 首先会检测左前是否有人,如果左前有人,就只会在左半边进行扫风;
- 如果检测到左前没人,会检测右前是否有人,如果右前有人,只会在右半边进行扫风;
- 如果左前和右前都有人,才会180度扫风;
- 如果左前和右前都没人,那就不会扫风。
同时,也会进行环境温度的检测 - 如果环境温度>27度,那么就会进入低速模式;
- 如果环境温度>29度,那么就会进入中速模式;
- 如果环境温度>31度,那么就会进入高速模式;
同时,每隔10分钟就会检测一次周围是否有人,进行扫风模式的刷新。
同样,如果按下PA8口的按键,程序会跳回选择模式。
其中自动模式是由以下程序实现的
void auto_mode_Init(void)
{
speed_control_Init();
//显示速度两个字
OLED_ShowChinese(10,32,7,16,1);
OLED_ShowChinese(26,32,8,16,1);
OLED_ShowString(42,32,":",16,1);
OLED_Refresh();
setccr(1500);
}
void auto_go(void)
{
dht11_package_show();//温湿度的获取和显示
if(dat[2]>=27&&dat[2]<29)//温度大于27度,进入低转速模式
{
low_speed();
}
if(dat[2]>=29&&dat[2]<31)//温度大于29度,进入中等转速模式
{
medium_speed();
}
if(dat[2]>=31)//温度大于31度,进入高转速模式
{
high_speed();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
其中low_speed()、medium_speed()、high_speed()就是我具体实现的自动转速实现的代码。
这些代码太大,放到以下连接中去下载。
https://download.csdn.net/download/nbbskk/87238938
6.总结
智能风扇系统的代码和设计思路就如上所示,如果想获得软件设计流程,可以参考我账号中的另一篇博客。
如果想要完整的源码,可以私信我。
注: 其中的汉字显示的代码都在oled.c、oled.h和oledfont.h中,如果想要显示自己想要的汉字,需要在字体生成软件中进行生成,字体生成软件我放在下面的连接中了。
https://download.csdn.net/download/nbbskk/87239085
其中的使用方法如下:
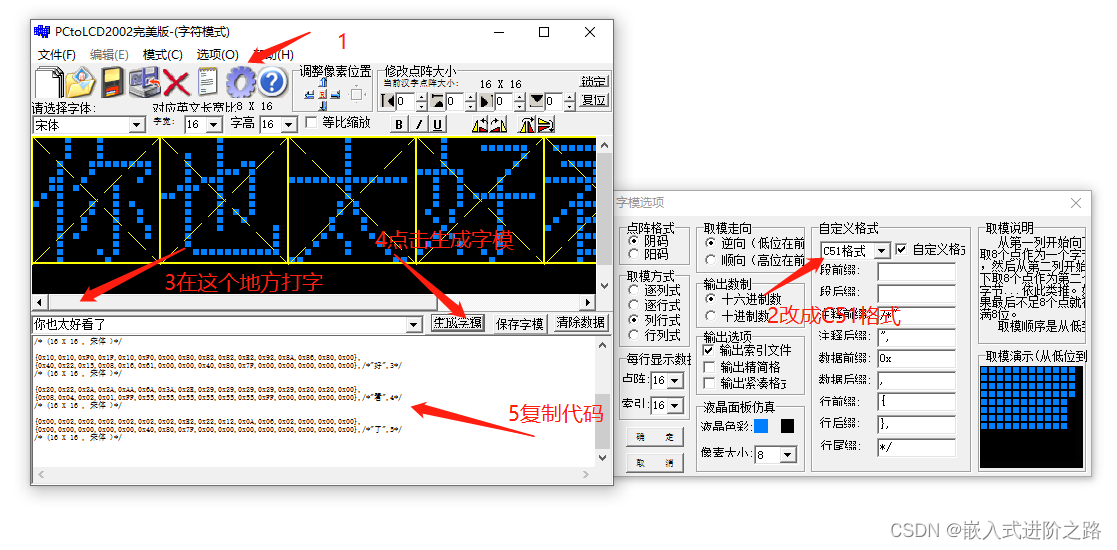
然后将生成的代码插入到oledfont.h中
格式和上面的代码保持一致即可

