
- 1GitHub上只下载部分文件的操作教程_github如何下载部分代码
- 2目标检测实战(五): 使用YOLOv5-7.0版本对图像进行目标检测完整版(从自定义数据集到测试验证的完整流程))_yolov5.7介绍
- 3Android动态权限详解
- 4【DevOps】Kibana:数据可视化与探索的强大工具
- 5MySQL索引下推(Index Condition Pushdown, ICP)优化深入解析_mysql 索引下推
- 6spss安装后 python_python从入门到入土教程(7)——用python实现SPSS的各种功能
- 7软件测试学习职业生涯必读的书籍【附电子版】_探索式软件测试电子书
- 8python爬虫及数据可视化分析_python爬虫与可视化项目简介怎么写
- 9【AI学习指南】七、PaddlePaddle自然语言处理-PaddleNLP的基础使用/中文分词/词性标注/实体识别/依存句法分析_paddlenlp 分词
- 10strongswan交叉编译与安装
节卡JAKA机械臂培训笔记(偏入门)_节卡机器人inpos指令发出
赞
踩
1 软件安装与资料下载
用户手册、快速入门手册 - 技术资料 - 资料下载![]() https://www.jaka.com/jszl.html
https://www.jaka.com/jszl.html
2 JAKA各类设备
ZU系列机械臂:pro版本的防水等级更高,PRO版需要在出厂前安装,普通版不能修改。
C系列:精度低、价格低
Minicobo:轻量化,用于教育,餐饮,新零售
MiniCab控制柜:更小,手柄接头和端子数不同于标准电控柜
力控:1维、6维,力跟踪精度1N,碰撞精度10N
安全防护:第一级防护视觉检测,第二级防护接触避碰
3 结构
3.1 机械臂末端:
末端point按钮:记录点位
末端Free按钮:自由拖拽
末端工具TCP接头:末端工具供电+信号
呼吸灯意义:
| 颜色 | 工作状态 |
| 蓝色 | 已上电,未使能 |
| 绿色 | 已上电,已使能 |
| 红色 | 故障(碰撞、超限) |
| 黄色 | 拖拽模式 |
| 黄色闪烁 | 暂停中 |
3.2 手柄
红色急停按钮(最上方)
开机按钮(左上)
上电按钮(右上)
解锁锁定按钮(右下)
启动与终止按钮(左中):终止程序后再次按下,从头执行程序
暂停与恢复按钮(左下):终止程序后再次按下程序从暂停处继续开始
复位按钮(右中):按下后机器人回到初始位置,初始位置需要在APP中设置。
3.3 电控柜:
电控柜底部四个接口,分别连接手柄、电源、机器人、网线。新版电控柜自带WiFi模块,不需要接路由器。
4 机器人开机与拖拽
step1 开机按钮(左上):按1-2S开机,底部呼吸灯变为蓝色,锁定指示灯亮起
step2 长按锁定键(右下)至灯熄灭,机器人解锁。
stewp3 闪电按钮(右上):解锁后按一下,机器人上电。机械臂末端呼吸灯点亮。
step4 上使能:同时按住闪电按钮和锁定按钮,听到咔咔声,手柄呼吸灯变绿,上使能。
按住机械臂末端free按钮或呼吸灯即可拖拽。
5 关机
- step1 下使能,咔咔两声。
- step2 下电,末端呼吸灯熄灭。
- step3 关闭控制柜,长按电源键3S。
6 APP使用
6.1 开机:
注意:在使用示教器时需要确保手柄在锁定状态。
使用安装有JAKA应用程序的安卓或鸿蒙系统的平板或手机,为便于操作建议使用平板,平板连接机器人的三种方法:
无线连接:手机/平板连接控制器WIFI,WIFI名字见控制柜:CAB……
有线连接:网线
离线连接:手机/平板连接控制器WIFI,如果出现能ping通机器人IP、但软件中找不到机器人的问题,可以直接输入IP连接。
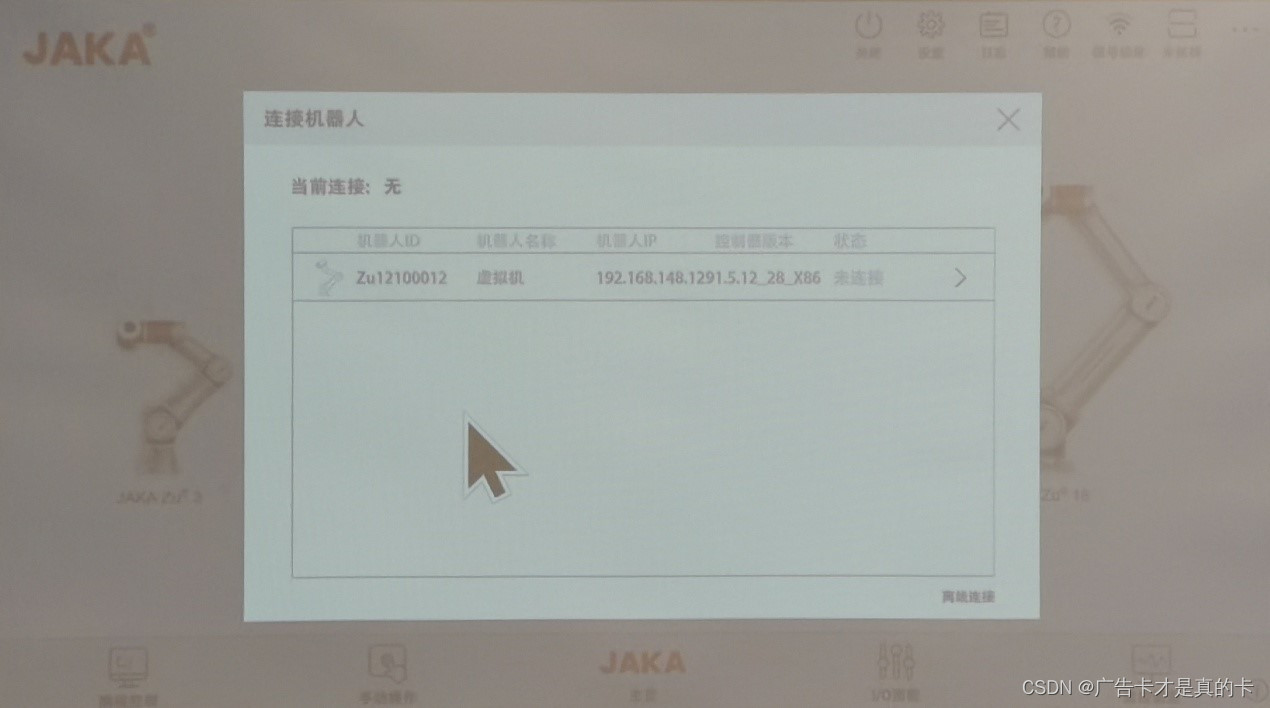
点击右上角未连接,可以找到一台机器人。如果找不到,断开WiFi重新连接,重启APP。或换用上述其它连接方法。
以管理员身份登陆,密码jakazuadmin
首先检测机器人安装位置:正装,侧装或反装。软件默认正装。由于这关系到机器人重力补偿,如果机器人是侧装或倒装,需要在软件中另行设置。。
之后设置末端执行器重量和重心。
接下来设置碰撞等级和碰撞保护。
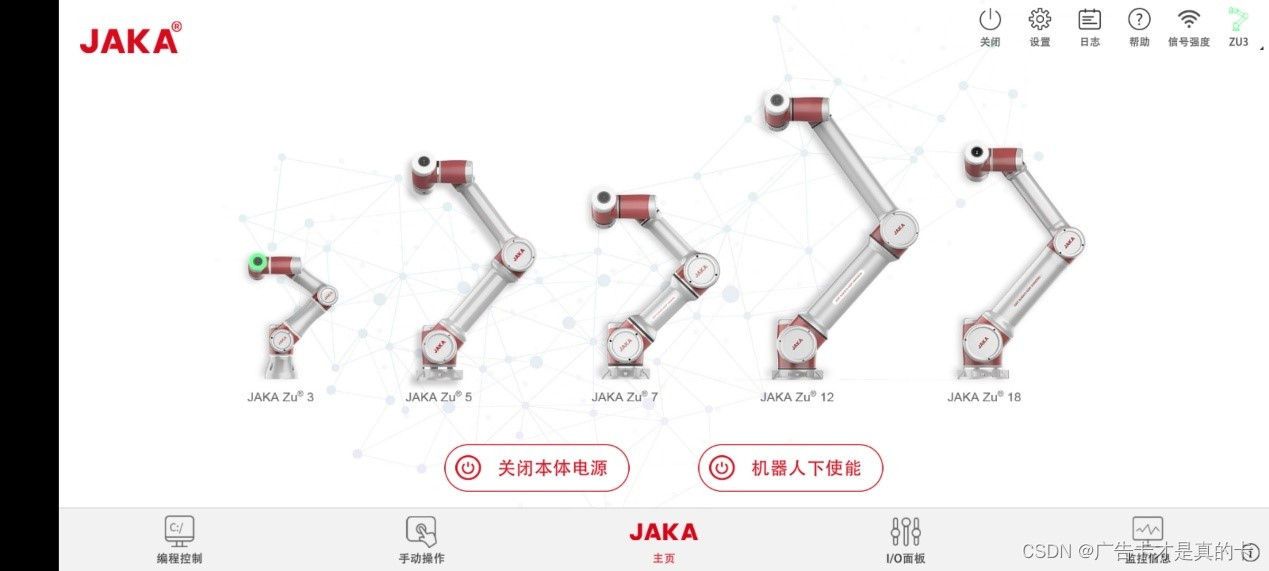
最后依次打开本体电源,上使能。机器人呼吸灯变为绿色,可以正常使用。
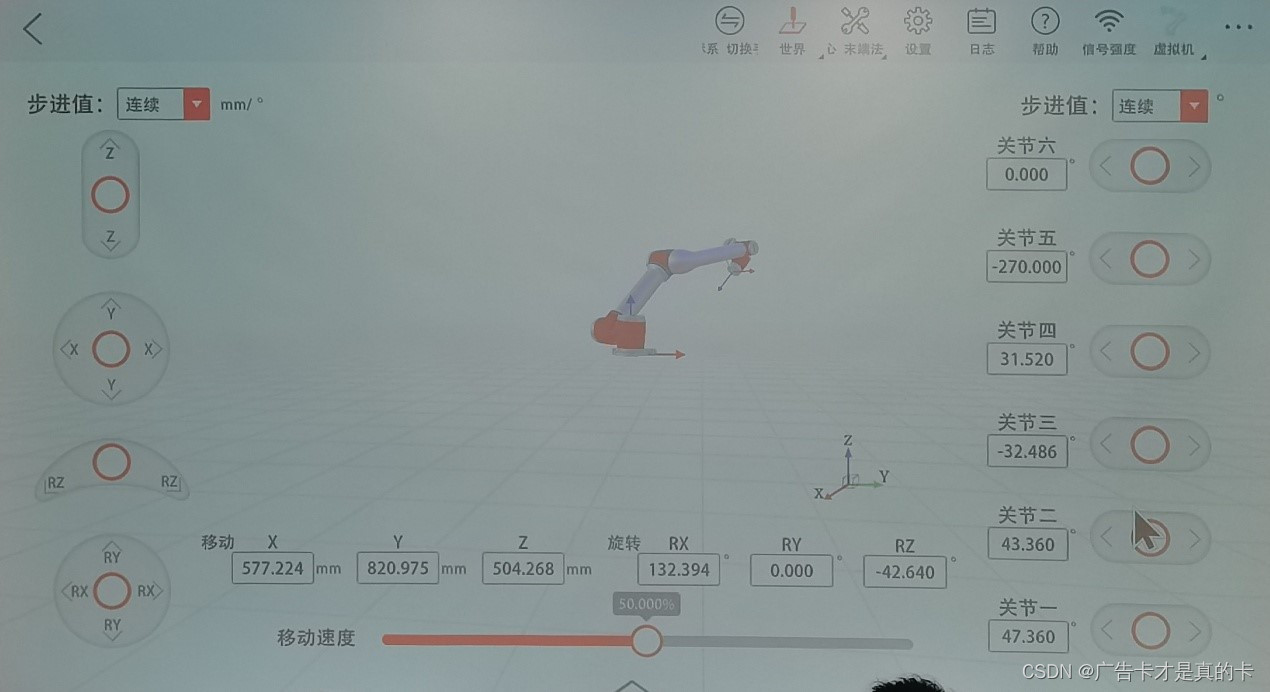
6.2 手动操作:
右边竖排是手动操作各个关节;左侧一排操纵末端移动;下方横条设置移动速度。
6.3 坐标系
机器人的相关坐标系包括两种:
基座坐标系(用户坐标系,世界坐标系):在机器人运行中固定不动。
工具坐标系:在机器人运行中随机器人运动而运动。
在APP的手动操作中,左侧的拖动是相对于坐标系而言的。在顶端可以选择基座坐标系或工具坐标系。
6.4 用户自定义基座坐标系
设置-操作设置-用户坐标系设置-输入设置:相对于基座坐标系的偏移量。
设置-操作设置-用户坐标系设置-三点设置:期望原点、期望X轴上一点、期望XOZ平面上任意一点。点的选取是通过操作机械臂,记录末端位置实现的。
6.5 用户自定义工具坐标系
设置-工具设置-TCP设置-工具中心点设置-输入设置:手动指定工具坐标系原点位置。当控制精度要求不高时,用这个方法更简单。
四点设置/六点设置:通过设置多个不同的到达该位置的位姿,相当于这些位姿所对应的工具末端均位于工具坐标系原点,但绕原点存在不同的转角。当控制精度要求较高时,用这个方法。
新的工具坐标系平行于现有工具坐标系(末端法兰中心),坐标原点位置根据上述两个方法确定。设置后,新坐标系添加在手动操作页面的各个坐标系中。

