
热门标签
热门文章
- 1python savefig_解决Python plt.savefig 保存图片时一片空白的问题
- 2Stable Diffusion 模型分享:majicMIX sombre 麦橘唯美_majicmix模型
- 3Vue3.2+TypeScript管理模块记录1-登录模块_vue3 typescript 登录页面
- 4知识蒸馏 示例代码实现及下载_蒸馏学习代码
- 5Linux 进程查找、杀死方案集合_linux查看进程和杀死进程的命令
- 6解决内网环境下Could not find a version that satisfies the requirement pycryptodome(from versions:none)
- 7Linux[报错Error]:userdel: user xxx is currently used by process 66035 删除用户时报错【已解决】_userdel: user pischi is currently used by process
- 8多线程重要知识点以及线程和线程池的创建_线程池创建线程 blocked线程有很多
- 9Leetcode复盘9——动态规划_leetcode n x n 的方格里,每个格子里都放了一定数量的芝麻
- 10altera fpga sdi输出方案_十年FPGA开发经验工程师谈设计技巧
当前位置: article > 正文
6、双足机器人mpc构建
作者:Li_阴宅 | 2024-07-02 04:27:20
赞
踩
6、双足机器人mpc构建
-
-
- 状态方案预处理
-
由质心动力学状态方程将{状态递推序列x}展开:
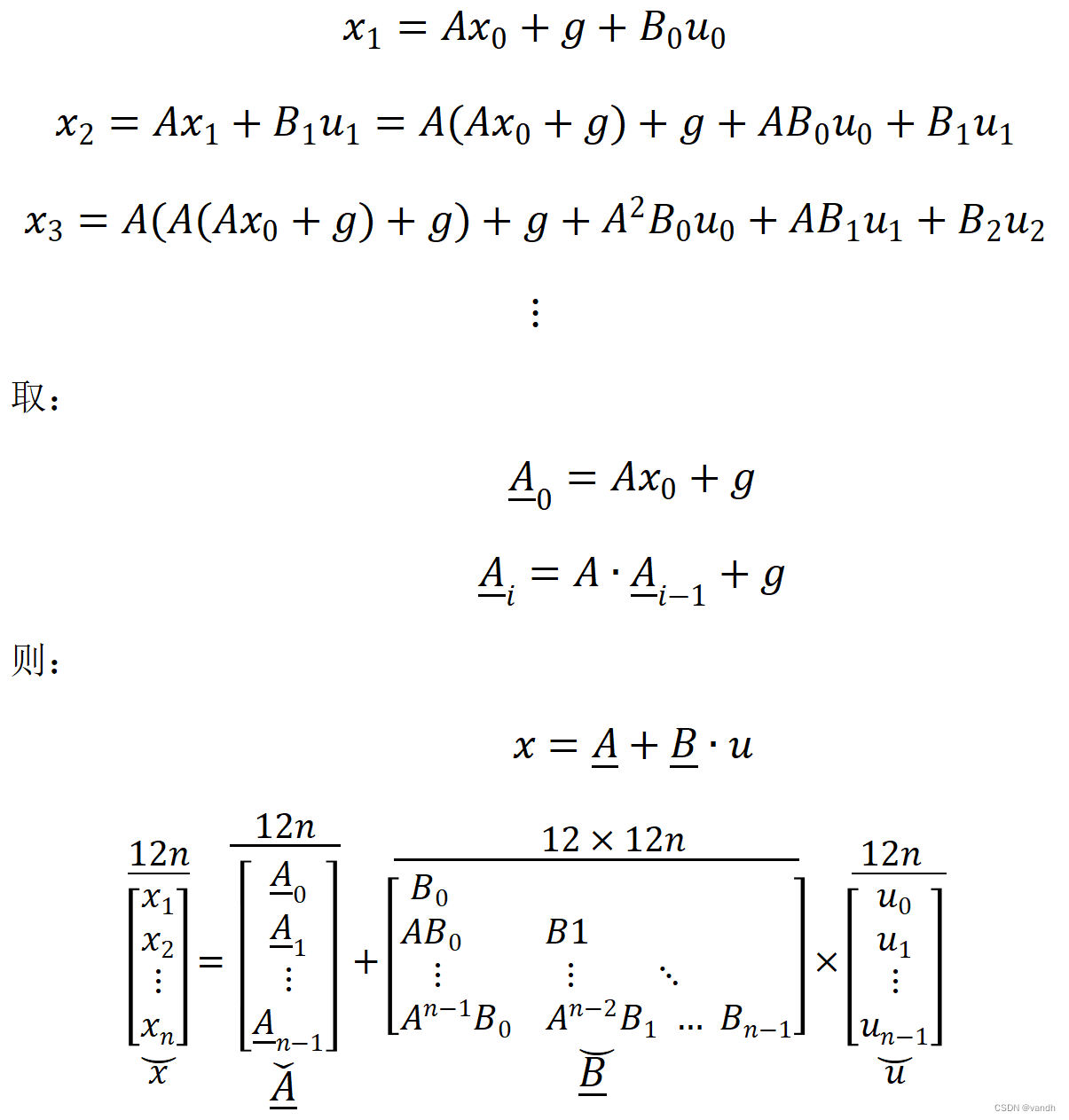
其中:
- x为状态递推序列,其下是堆叠矩阵表达式。xn为n时刻的状态变量,un-1为n-1时刻的输入变量。
- 输出y=x,参考目标Refer=0,误差e=y-Refer=x-0=x,n为预测空间;
-
-
- 二次规划
-
前述建立了空间状态方程,接下来就可以对未来时刻的输入量进行优化,优化问题会转换成一个代价函数,
推荐阅读

相关标签

