
- 1苍穹外卖项目(黑马)学习笔记DAY5_黑马外卖项目
- 2unity支持鸿蒙,#Unity# #ARKit3# Unity宣布支持ARKit3
- 3Github 上有趣的项目,用机器学习训练 AI 下五子棋_五子棋ai训练
- 4鸿蒙APP开发实战:【Api9】拍照、拍视频;选择图片、视频、文件工具类_华为鸿蒙api
- 5Transformer架构中基于窗口的的自注意力机制W-MSA和滑动窗口自注意力机制SW-MSA的实现_滑动窗口注意力机制
- 6HBase安装_hbase-2.5.5-hadoop3-client-bin.tar.gz
- 7failed to update store for object type *libnetwork.endpointCnt: Key not found in store
- 8转载:智能驾驶域控制器的软件架构及实现(下)-支持L3+的软件架构及产品架构_智能驾驶集中式架构
- 9蓝桥杯,进决赛了
- 10解决方案:2024年Pytorch(GPU版本)+ torchvision手动安装教程[万能安装方法] win64、linux、macos、arm、aarch64均适用_pytorch gpu版本
SSIST 2016 参会总结--day2_ssis 2016
赞
踩
今天是SSIST 2016的第2天。今天会议的主题是:robotics和virtual reality,上述两领域各路大牛云集,看看下面的会议日程就知道:

每个讲者的报告都非常精彩,这里我按照主题robotics & virtual reality分成两大类,挑选几个有代表性的演讲介绍一下。
robotics
本次大会机器人领域大牛来了不少,无人机是当之无愧的热门话题,在此重点选择三个讲者内容介绍:美国宾夕法尼亚大学的Vijay Kumar教授,德国弗莱堡大学的Wolfram Burgard教授,香港科技大学的李泽湘教授。
Vijay Kumar (UPenn) – Flying Robots: Beyond UAVs
Vijay Kumar教授大名鼎鼎,是无人机领域的大神级人物,1983年毕业于印度理工学院(简称IIT,印度最顶尖的精英大学),87年博士毕业于美国俄亥俄州立大学,现在宾夕法尼亚大学从事自主地面和空中机器人研究工作。教授2012年3月在TED上的演讲《Robots that fly and cooperate》在全世界掀起了不小的波澜,让人惊呼原来无人机已经发展到如此智能。记得视频中的小巧的四旋翼无人机灵活的运动性能给我印象深刻,更厉害的是多个无人机的协作,最后的无人机集体奏乐不能再赞!2015年12月教授又在TED上做了《The future of flying robots 》的报告,展示他们新的技术和成果,同样让人惊叹!今天Vijay Kumar教授1个小时的演讲非常精彩,好了,废话不多说,上图!
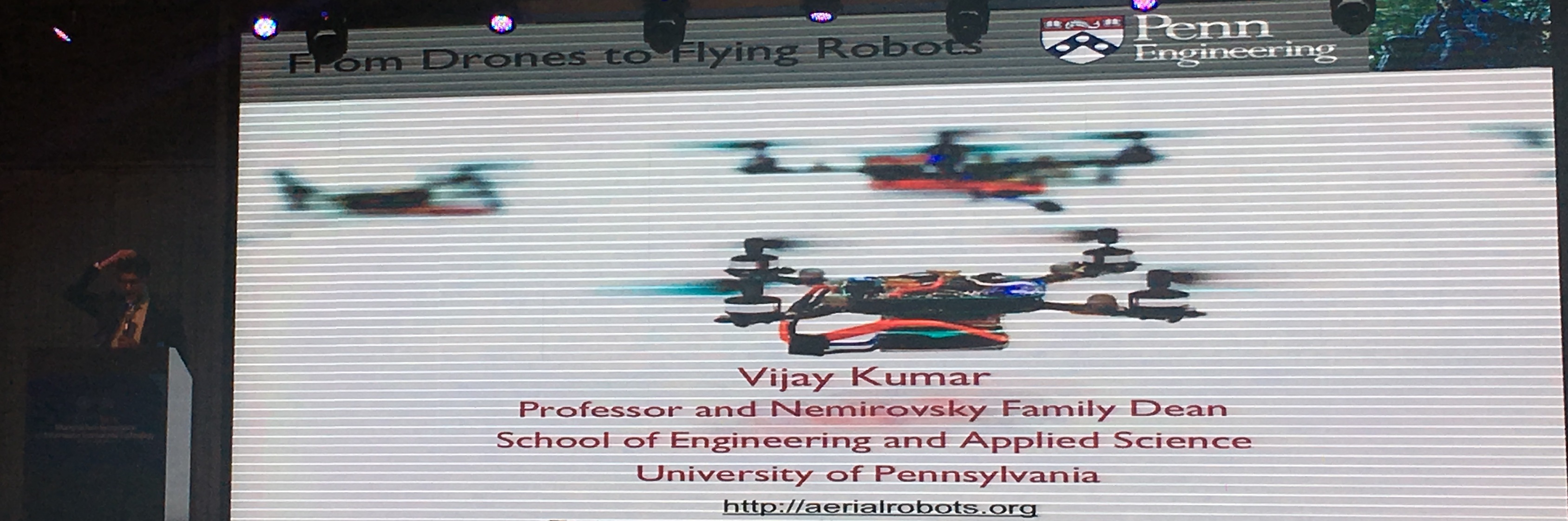
Vijay Kumar教授报告主要包括以下几个方面:
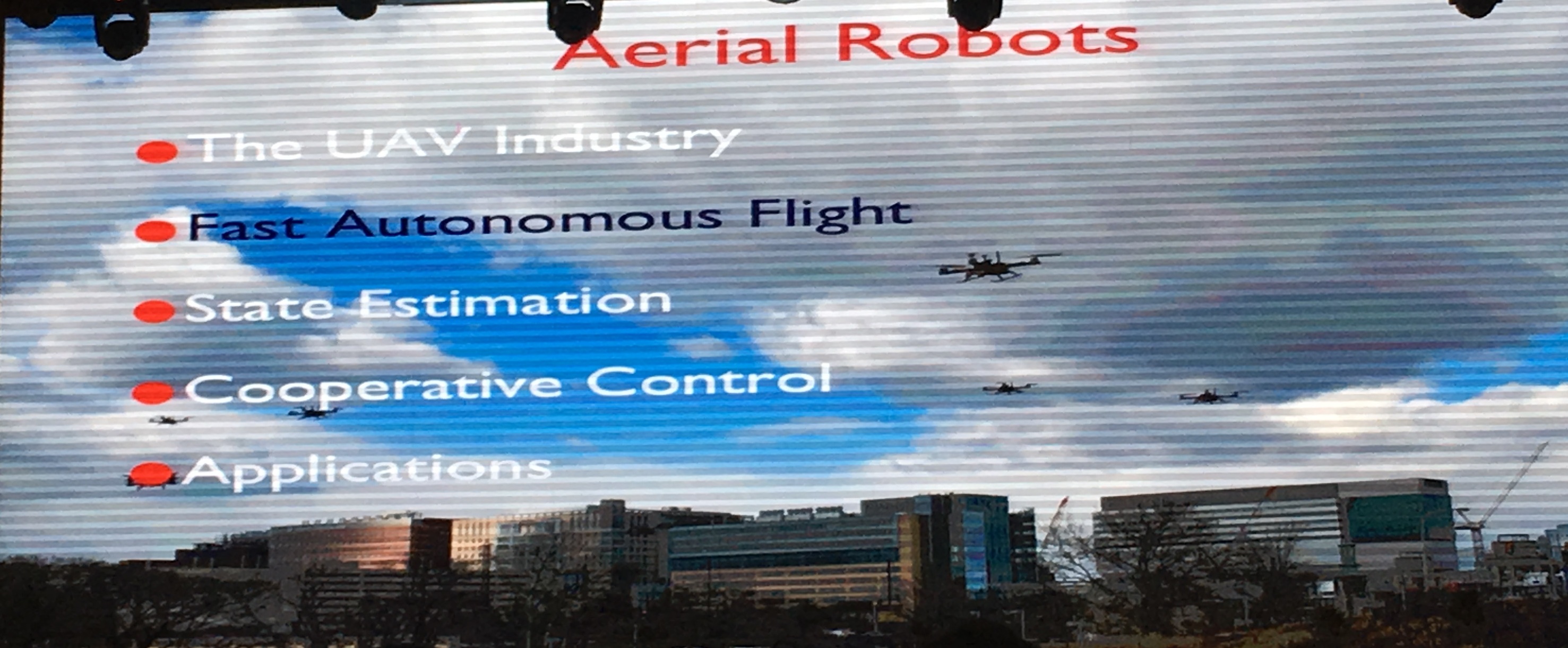
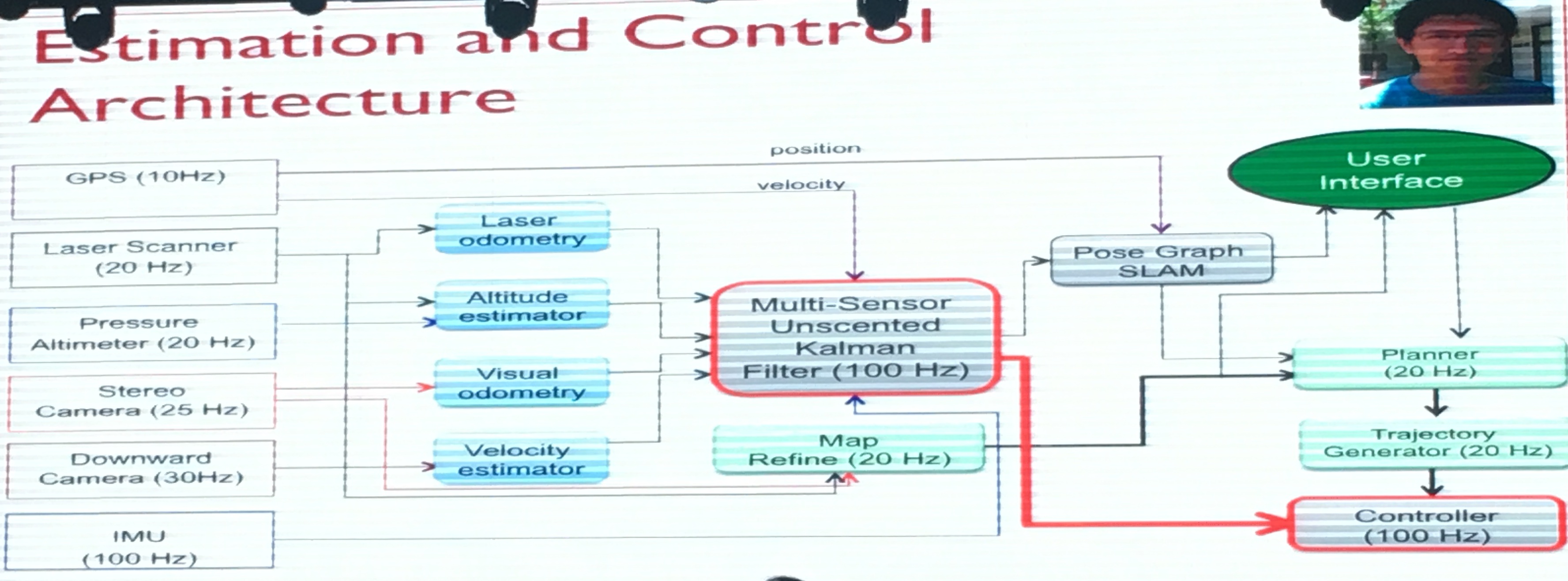
下图是软件的结果框架:
位置估计和姿态控制结构,我惊讶的发现教授竟然采用的是相对简单的unscented kalman filter,另外SLAM方法也是算法中的一个重心。
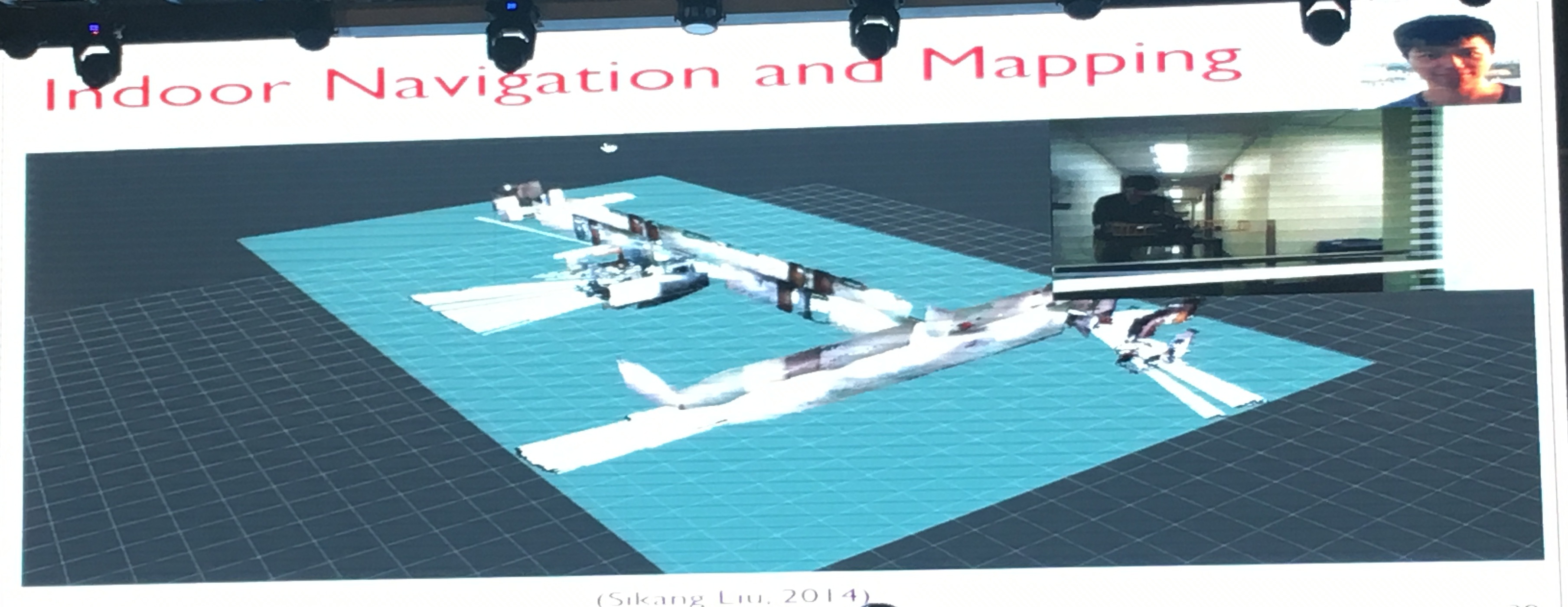
无人机室内三维地图构建,非常实用,非常炫酷!第一次在TED大会上看到该技术时就感觉必然大有用武之地!
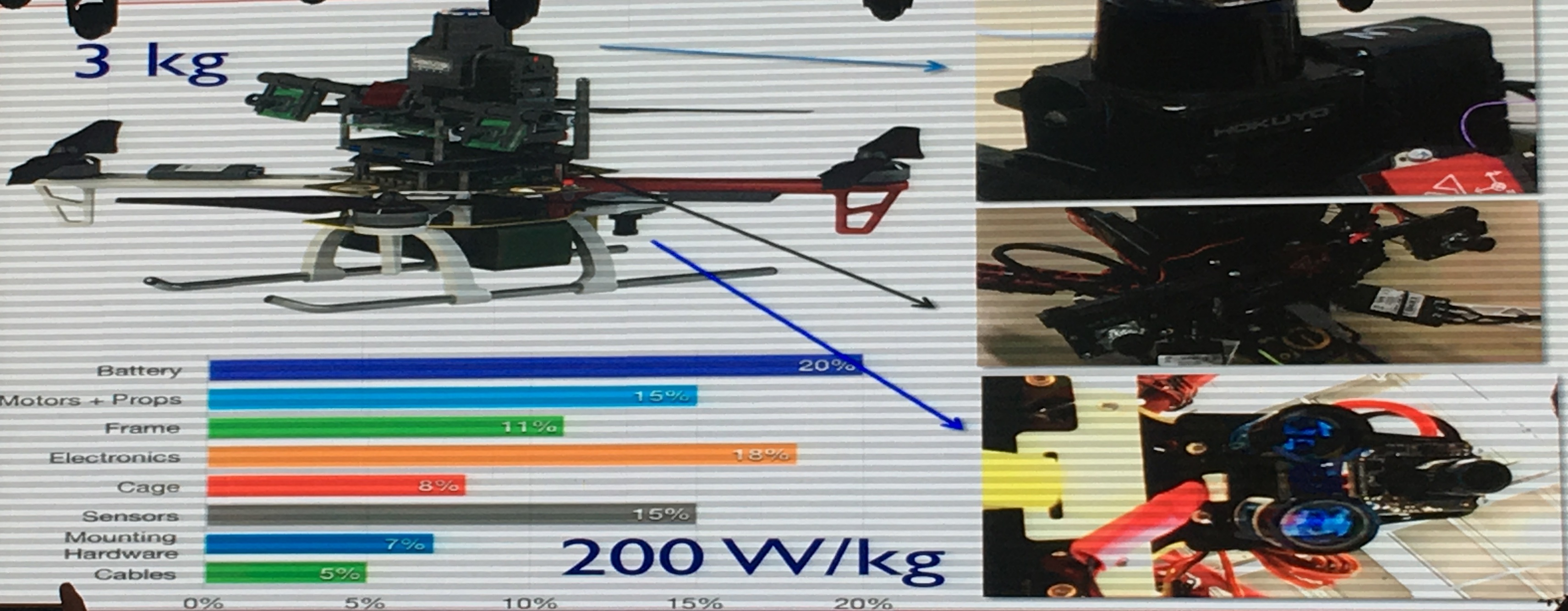
关于重量和功耗,教授解释了为什么不在无人机上加GPU的原因:不是因为GPU本身耗电,而是因为它太重了(哈哈,出人意料的结论)
关于无人机协作,教授从仿生学开始,介绍了协作原理。同时解释了为什么协作时不打标记(匿名),因为其周围的邻居变化太快,尤其协作的无人机数目很多时会不好处理,匿名后根据距离定义邻居反而更容易处理。
最后介绍了无人机在紧急救援,智能农业等方面的具体应用。大牛就是大牛,演讲的水平,对于领域的研究和视野都是一流。
Wolfram Burgard (U. Freiburg)–Probabilistic Techniques for Mobile Robot Navigation
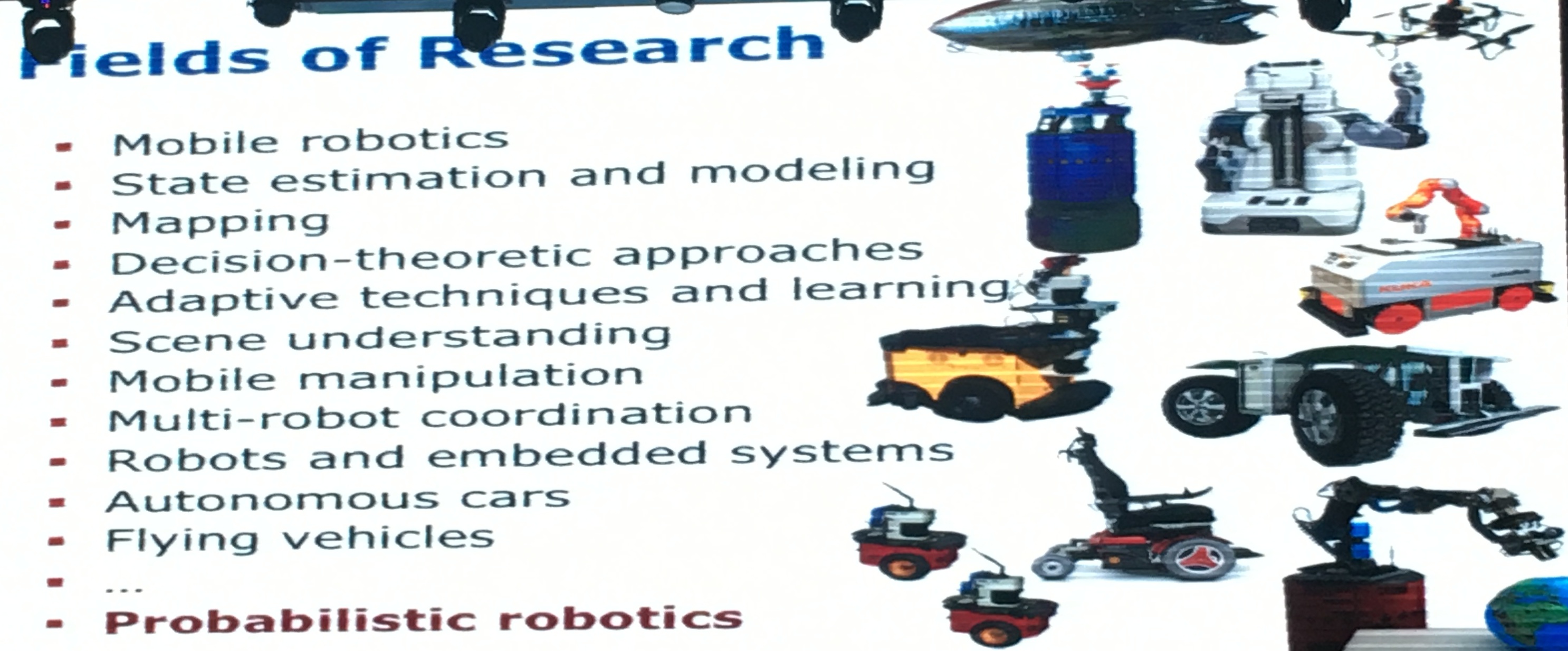
Wolfram Burgard是德国弗莱堡大学的教授,是 Autonomous Intelligent Systems研究室的老大。主要研究移动机器人和人工智能技术。他在机器人导航和控制中的概率技术研究中做出了非常大的贡献,包括 localization, map-building, SLAM, path-planning, exploration等。他编写了两本机器人领域非常著名的书《Principles of Robot Motion - Theory, Algorithms, and Implementations》和《 Probabilistic Robotics》,是机器人领域的泰斗级人物。和Vijay Kumar教授不同的是,Wolfram Burgard教授在报告中更多的介绍了导航和控制算法,需要一定的专业知识才能理解的较好。先来看一下Wolfram Burgard教授的实验室研究方向,真是广泛呐!
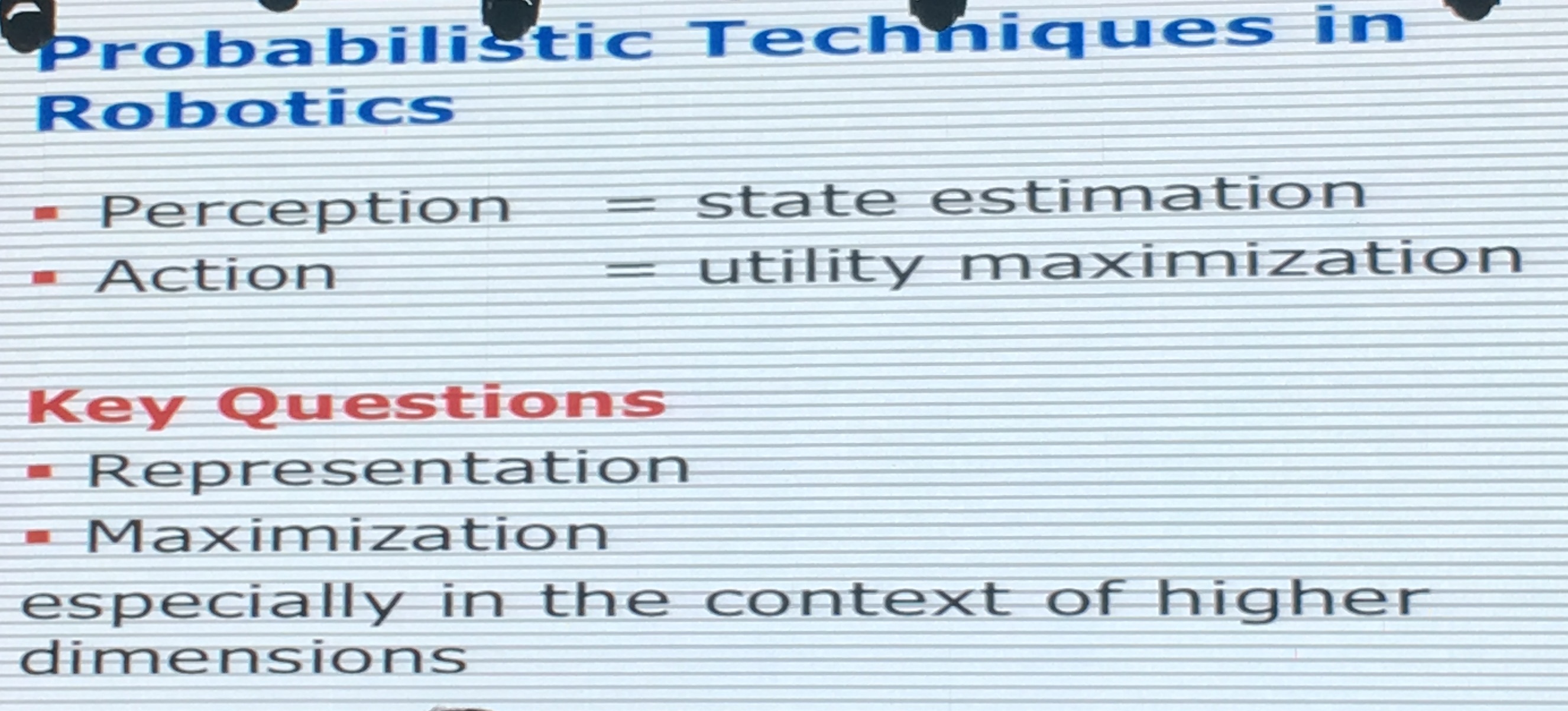
机器人中的概率技术是如何应用滴:
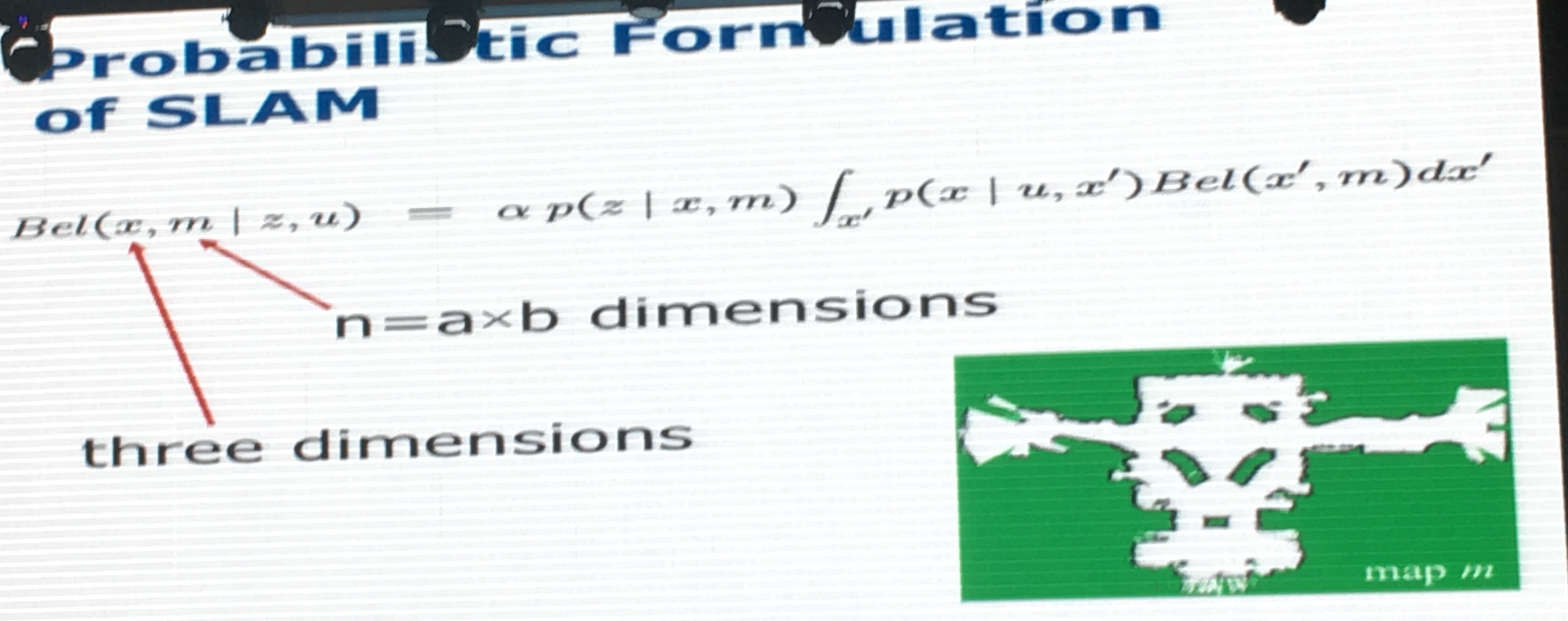
SLAM中的概率公式:
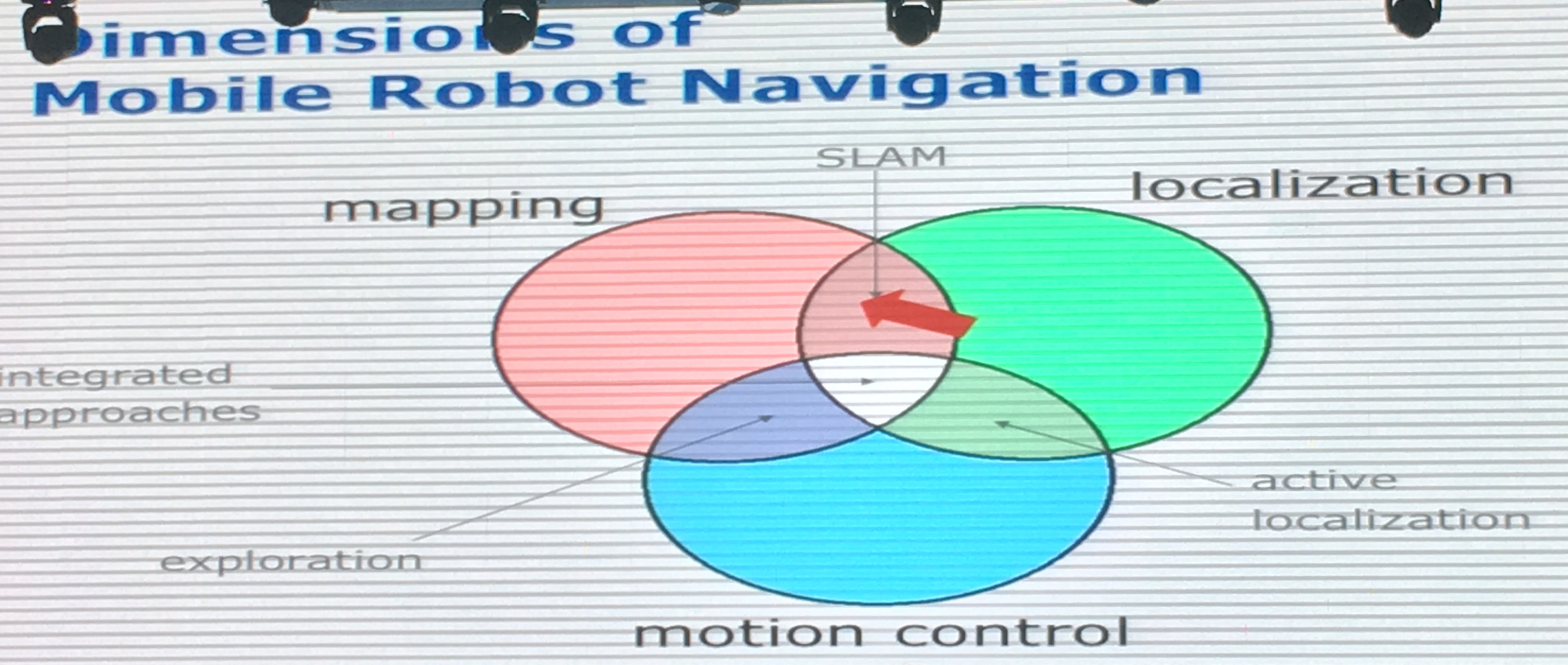
移动机器人导航领域的韦恩图:
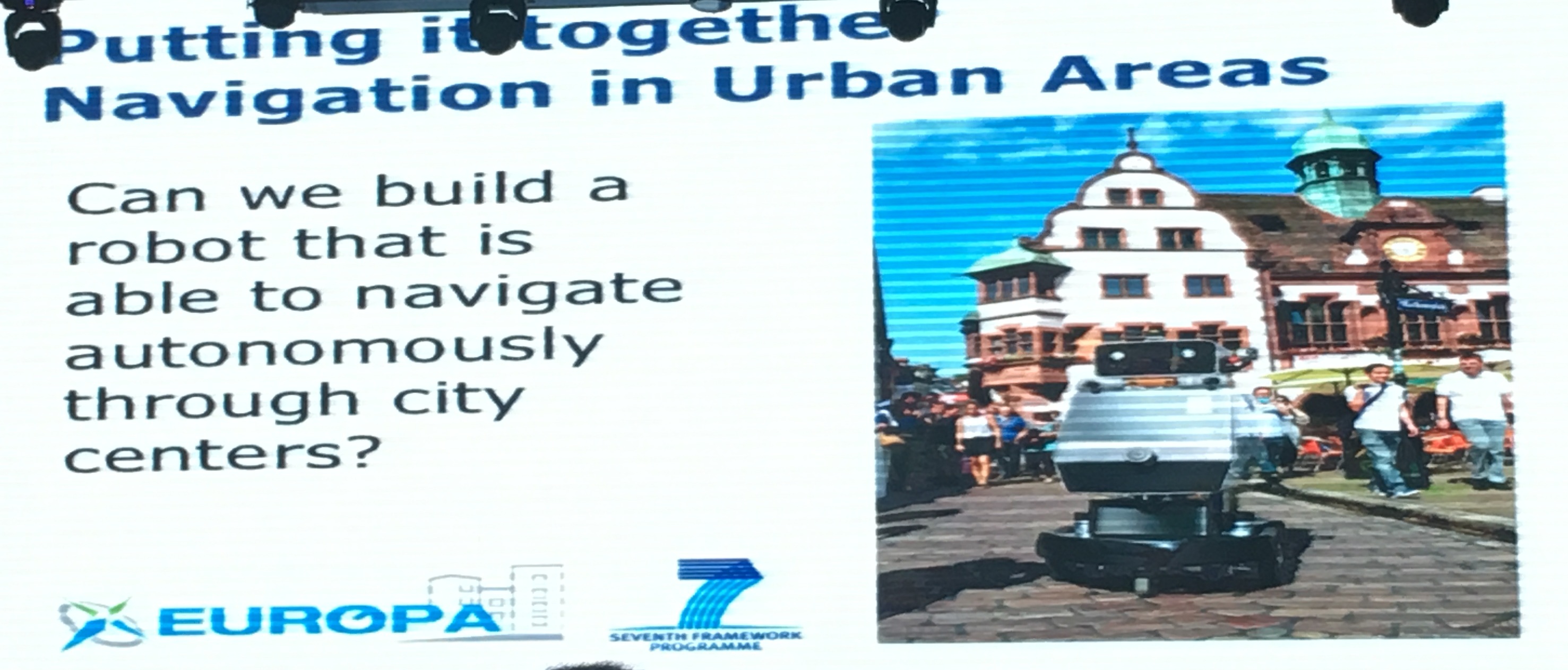
教授介绍了他们做的一个在城市中心实现全自动导航的移动机器人,还播放了一个视频,有兴趣可以看看,做的真心不错!
最后简单总结了一下:
总之,搞机器人研究的同志们应该都会很熟悉该大神的两本神书,报告后就有同学上去讨教,大神很认真的解答,相信受益匪浅吧。哎,我的哑巴英语,在这种场合根本张不开嘴,得练!
李泽湘–Developing the HKUST Robotic Ecosystem: Reflection and Lessions Learned
李教授是香港科技大学电子与计算机工程学系教授,自动化技术中心主任,创办了固高(Googol)科技、李群自动化等多家著名企业,是大疆创新CEO汪滔的导师(也是DJI公司的董事)。恕我孤陋寡闻,听到这个googol我第一印象还以为是山寨Google的,结果一查,Google成立于1998年9月,googol成立于1999年10月,主要产品是运动控制器,八竿子打不着,看来我想多了,李教授莫怪,哈哈。
李教授先介绍了其求学经历,然后介绍了他从学术界到创业的历程和感悟如下:基于项目导向的学习,边做边学;多学科交叉团队的协作;从设计到模型的快速迭代,快速提高规模;将工程和艺术、科学文化进行结合。相信这些经验分享都是交了不少学费才悟出的。
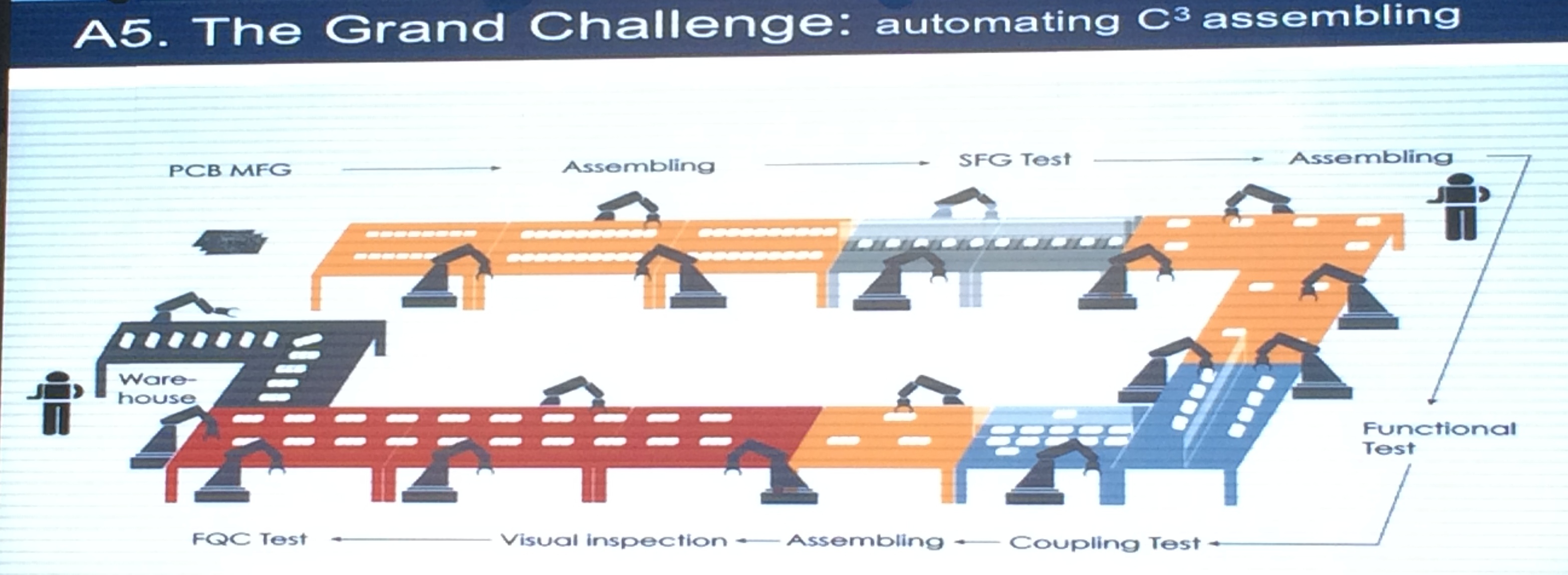
然后从自动化技术发展方面进行了介绍,自动化技术逐渐使得需要大量人员重复劳动的工作逐步用自动化机器代替,如下图
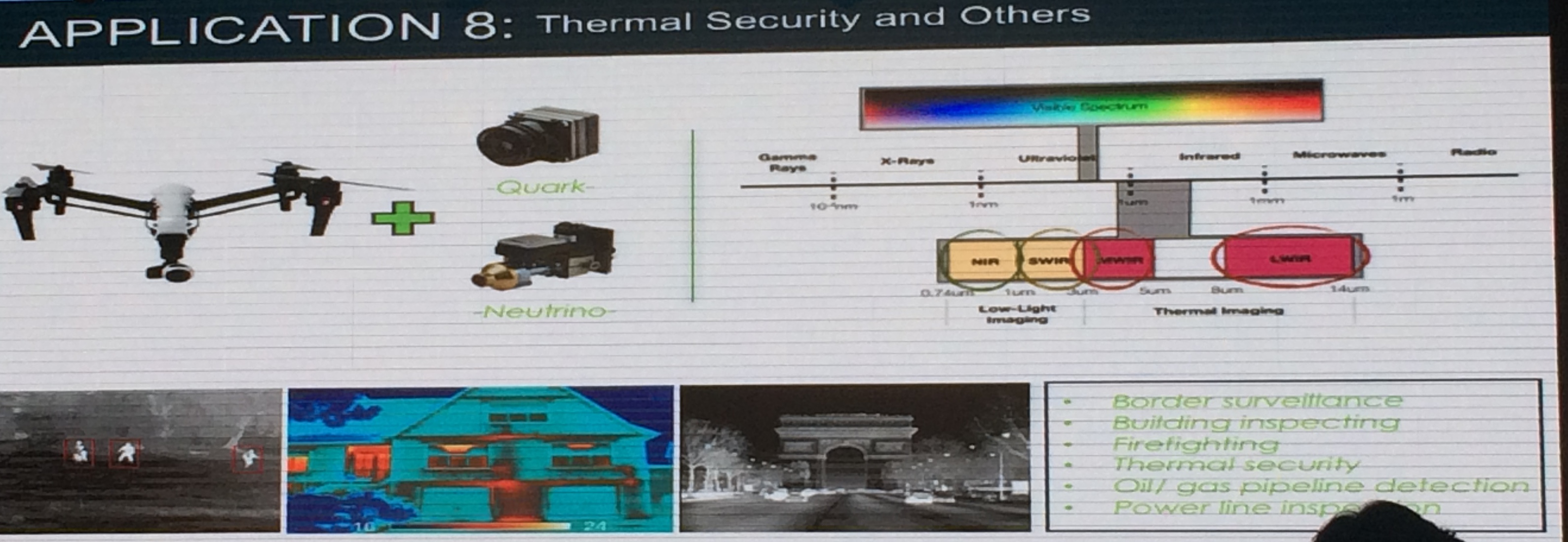
然后介绍了DJI的无人机,现在已广泛应用于通信基站、桥梁、堤坝等人力无法到达地方的探查;火灾现场探查;影视拍摄;精准农业(播放了无人机自动喷洒农药的视频);安全监控(如下图)等方面的具体应用。
现在李教授还在做一些致力于机器人教育的办学工作,如下。
最后做了如下总结,句句肺腑之言啊
virtual reality
虚拟现实是最近几年大热的话题,2016 ACES(亚洲消费电子展)上,VR几乎霸占了所有人的眼球,参会的公司至少有几十家有相应的产品或者展示。这里我主要介绍一下上海科技大学的虞晶怡教授和山东大学的陈宝权教授的报告。
虞晶怡–Shanghaitech VR Technology Press Release
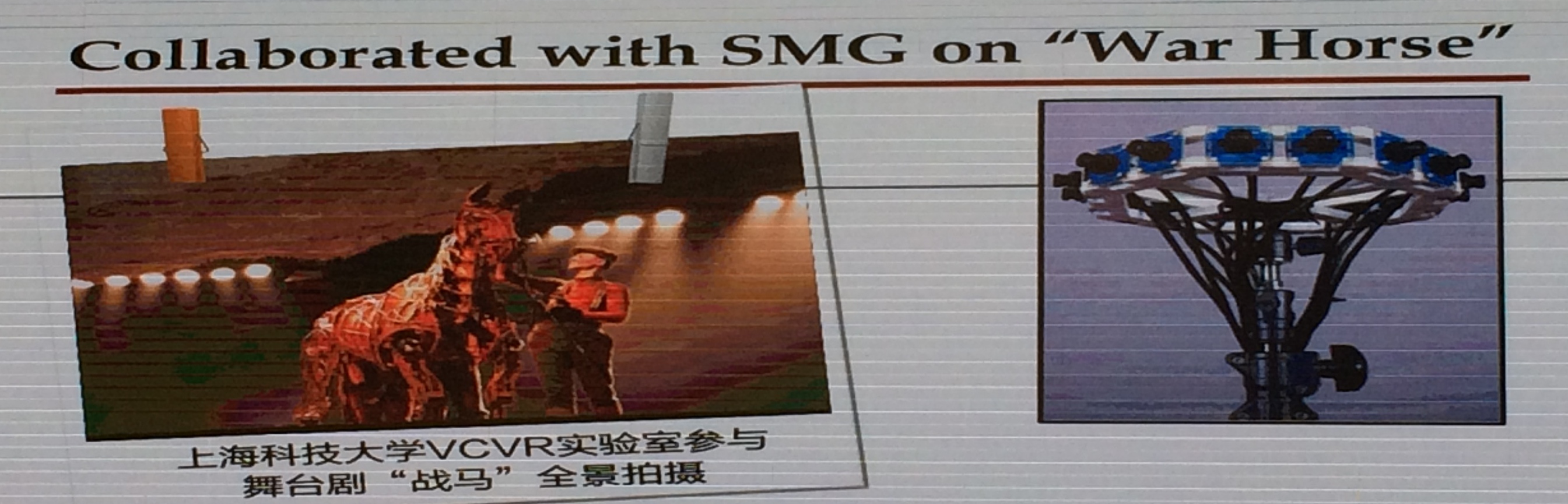
虞晶怡教授于2000年获美国加州理工大学应用数学及计算机学士学位,2005年获美国麻省理工大学计算机与电子工程博士学位。他于2015年9月全职加入上海科技大学信息科学与技术学院任教授。虞教授是早期虚拟现实的践行者之一,早年曾做过虚拟现实的创业公司。目前成立了上海叠境数字科技公司,主要做基于光场的计算机视觉技术。本次大会有叠境的产品展示,下图就是在会场展示的360度视频采集设备,它结合裸眼3D成像技术可以提供实时的直播。第一天报告时放在会议现场进行了360裸眼3D视频直播。

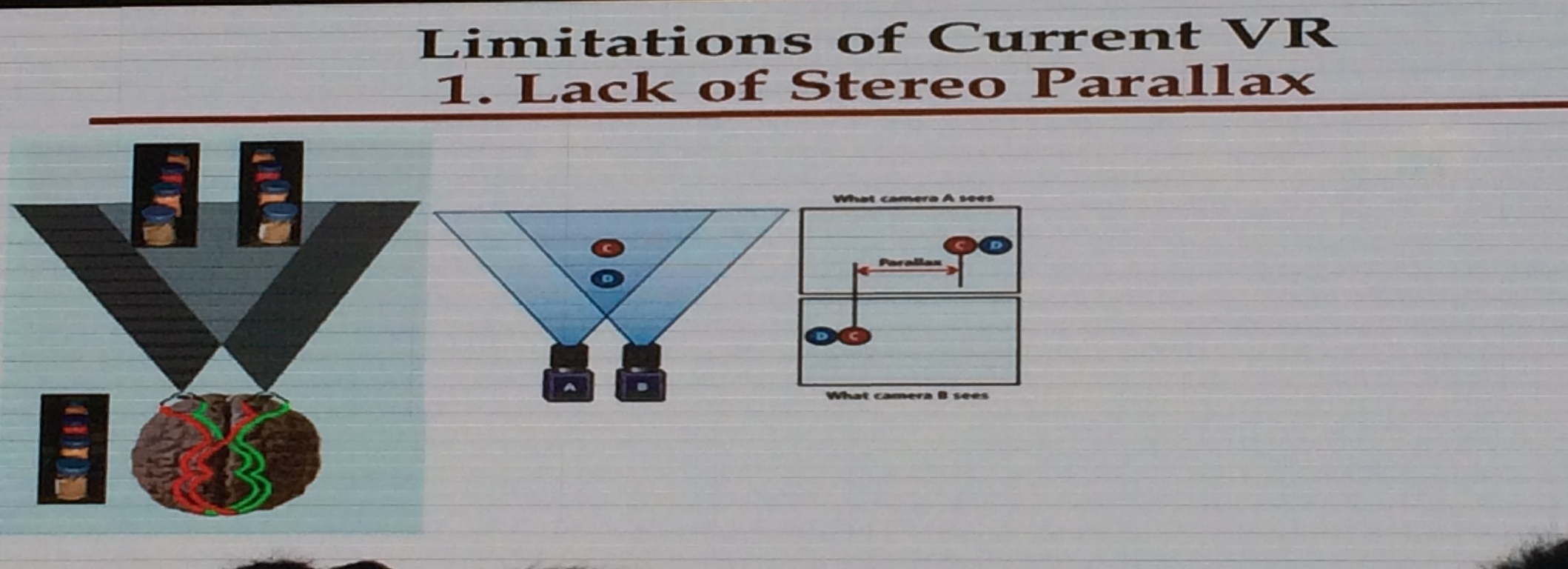
虞教授介绍了当前VR技术的限制。第一就是缺乏立体视差,因为处理的输入都是2D图片
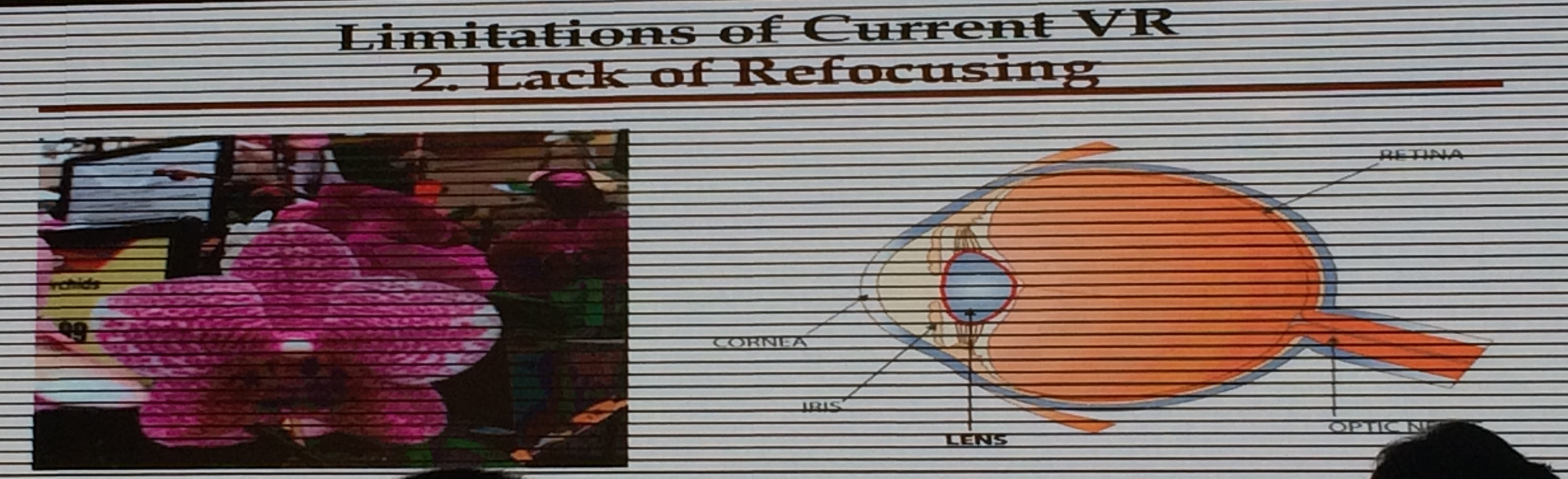
第二是缺乏重对焦技术,这也是摄像头和人眼的最大不同点之一。
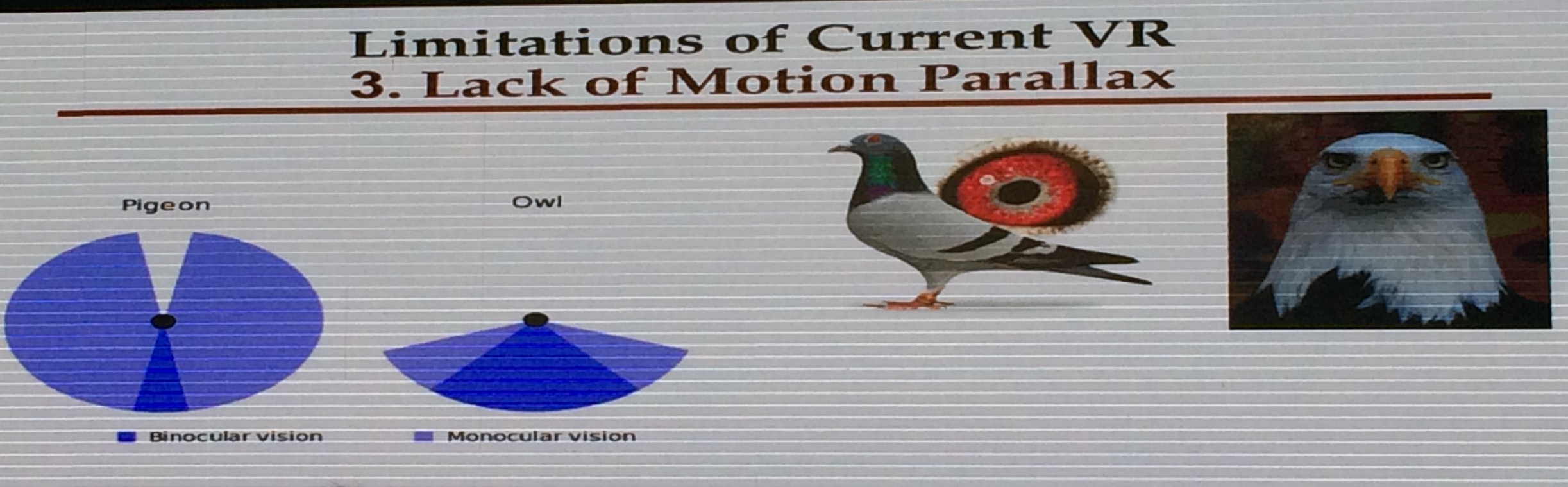
第三就是缺乏运动视差。
而采用他们的光场视觉模拟技术可以解决上述几个问题。
陈宝权–3D Urban Sensing and Visualization
陈教授1999年博士毕业于纽约州立大学石溪分校,现在是山东大学计算机科学与技术学院及山东大学软件学院院长。他详细介绍了其团队在城市3D重建和可视化计算方面的工作。
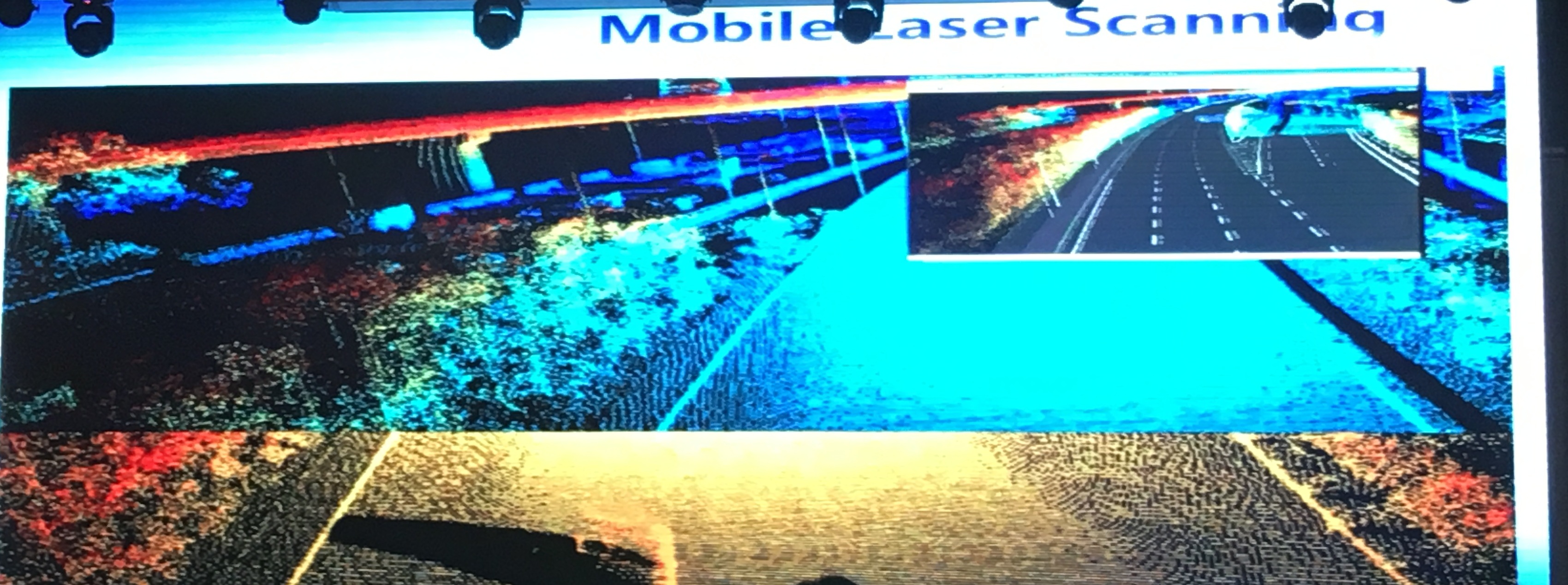
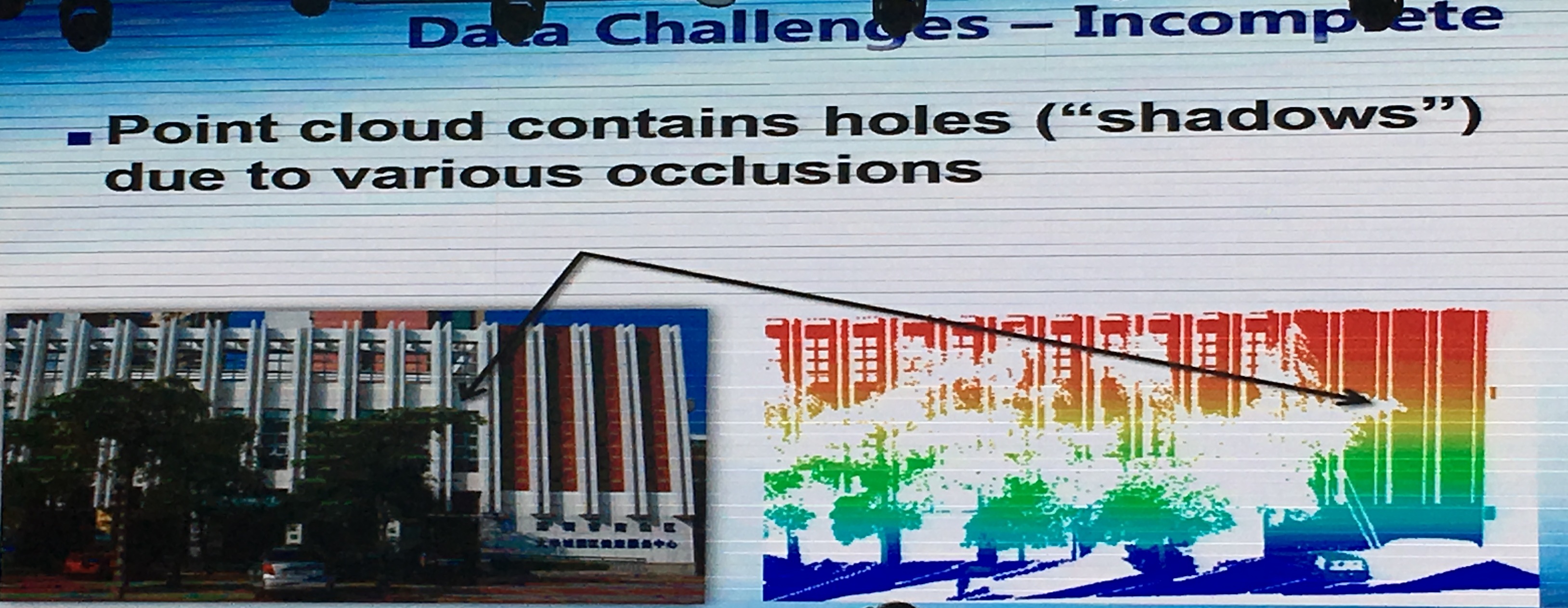
他们做了城市的3D重建工作,可以将城市空间位置进行3D可视化。下图是他们的移动激光扫描器
下图介绍了遇到的挑战之一:由于遮挡造成的空洞。
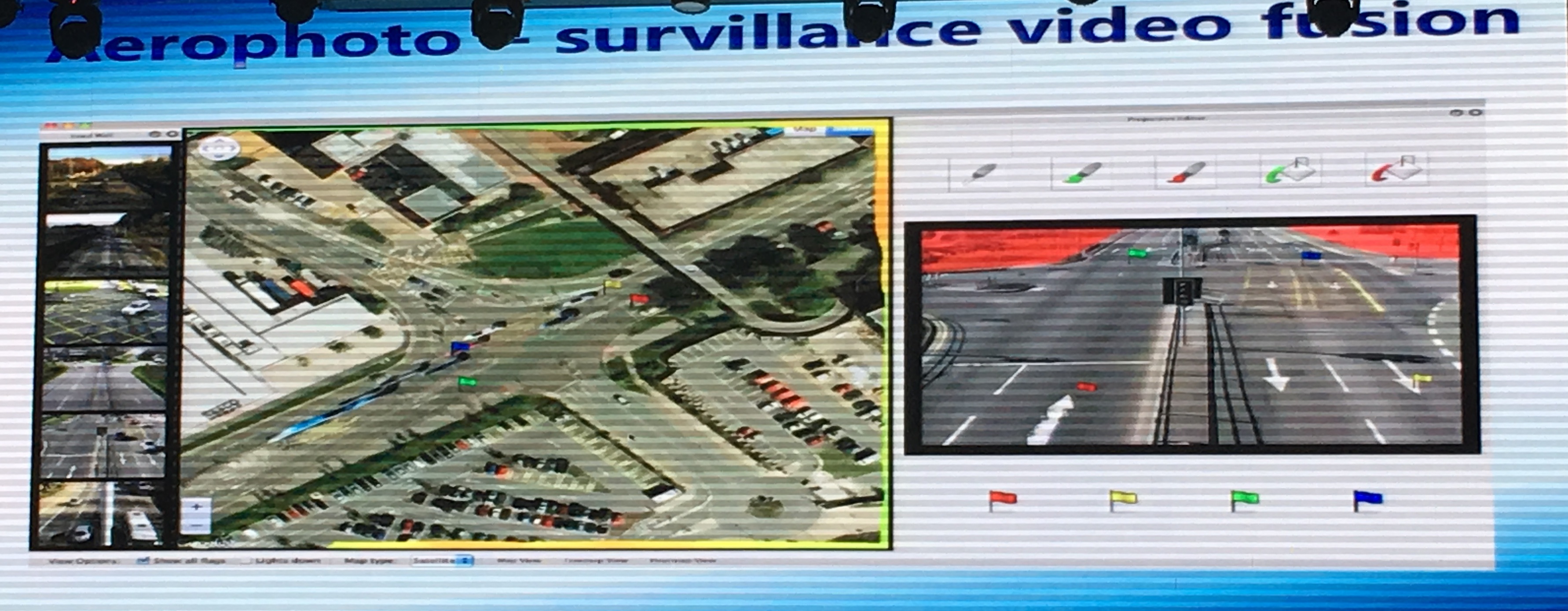
他们也做了数据融合的工作,下图就是航空监控视频的融合:
陈教授报告非常精彩,由于听的入神忘记了拍照,研究的视角宏大,对于智能城市的建设非常有价值。央视科教频道的【走近科学】栏目曾经做过专题《把城市搬到电脑里》,介绍了其可视计算在城市建设和日常生活中的广泛应用。有兴趣的可以去看看。
感悟
今天的大会开阔了眼界,亲眼见到各位大神还是非常的激动。有几个小感悟总结一下。
1、SLAM技术作为计算机视觉和机器人学科的交叉,多个讲者都提到了该技术,vision+SLAM+AI个人觉得应该是非常有前景的方向。
2、虚拟现实目前虽然火爆,但是用户体验还是有不少欠缺,比如自动重对焦、运动视差等,要想有大的改进,光场技术是其中重要技术之一。美国光场技术公司Lytro目前就致力于该技术实现。
3、要努力练习英语口语!要努力练习英语口语!要努力练习英语口语!重要的事情说三遍。

