
热门标签
热门文章
- 1浅谈【Stable-Diffusion WEBUI】(AI绘图)的基础和使用_stable diffusion --medvram --theme dark --xformers
- 2Hive(一) Hive概述、三种方式搭建和区别_hive 的安装过程与ha搭建有什么区别
- 3应用连MySQL 报错ERROR 1129 Host is blocked because of many connection errors
- 4PMP证书到期后,有没有必要续证了_pmp证书有必要续吗
- 5Centos7一键安装Docker脚本_centos安装docker 菜鸟 一键脚本
- 6linux搭建raid5命令,命令行操作RAID5
- 7C语言 哈希表的简单实现_用 hash table 实现一个存储学生成绩的程序,你的程序要能处理 collision,请使用
- 8【Redis】sentinel故障转移_sentinel 是如何实现故障转移的
- 9【Super数据结构】堆结构的建立与调整&&堆的应用(含堆排序/topK问题)
- 10【Web前端】JS高级知识总结_前端js高级部分
当前位置: article > 正文
通信总线协议之CAN-FD协议详解_canfd
作者:Monodyee | 2024-04-16 17:21:49
赞
踩
canfd
通信总线之CAN-FD总线协议详解
1. CAN-FD 简介
1.1 什么是CAN FD
- 在《 通信总线协议之CAN总线协议详解 》中介绍了
CAN 2.0 A/B总线协议,但是随着总线技术在汽车电子领域越来越广泛的应用,特别是自动驾驶技术的迅速发展,汽车电子对总线宽度和数据传输速率的要求也越来越高,传统CAN(1MBit/s,8Bytes Payload)已难以满足日益增加的需求。 - 因此,一种能够与CAN 2.0 A/B兼容,但通信速率更高,有效载荷更高的CAN总线 :
CAN-FD总线协议应运而生,在2012年,Bosch发布了新的CAN FD标准 (CAN with Flexible Data Rate) - CAN FD继承了CAN的绝大多数特性,如同样的物理层,双线串行通信协议,基于非破坏性仲裁技术,分布式实时控制,可靠的错误处理和检测机制等,同时CAN FD弥补了CAN在总线带宽和数据长度方面的不足。
1.2 CAN FD的特点
- CAN FD
传输速率是可变的:从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,最高速率可达到8Mbps - CAN FD
数据长度不同:CAN FD每个数据帧最多支持64个数据字节,而传统CAN最多支持8个数据字节,这减少了协议开销,并提高了协议效率。 - CAN FD
帧格式不同:CanFD新增了FDF、BRS、ESI位FDF 位(Flexible Data Rate Format):原 CAN 数据帧中的保留位 r,用来区别是 CAN 报文还是 CAN-FD 报文,FDF 位常为隐性 1,表示 CAN FD 报文;BRS 位( Bit Rate Switch):表示位速率转换,当 BRS 为显性位 0时,数据段的位速率与仲裁段的位速率一致(恒定速率),当 BRS 为隐性位 1时速率可变(即 BSR 到 CRC 使用转换速率传输);ESI 位(Error State Indicator):发送节点错误状态指示,主动错误时发送显性位 0,被动错误时发送隐性位 1。
2. CAN-FD总线协议
- CAN FD节点可以正常收、发CAN报文,但CAN节点不能正确收、发CAN FD报文,因为其帧格式不一致。
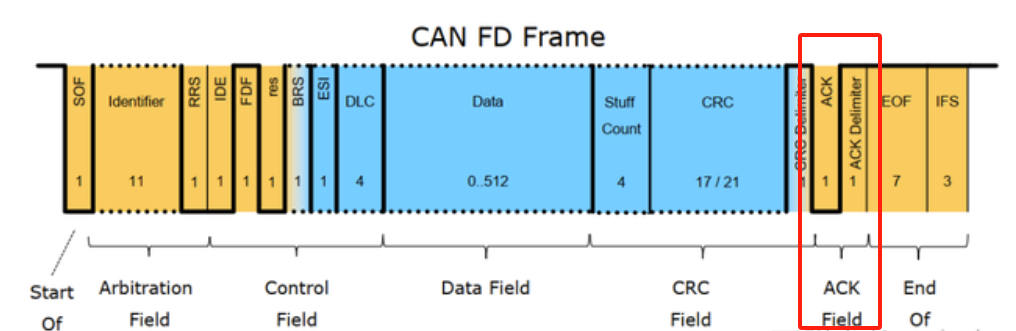
- 与CAN一样,CAN FD一共具有:帧起始,仲裁段,控制段,数据段,CRC段,ACK段和帧结束,7部分组成。


2.1 帧起始
- CAN FD与CAN使用相同的
SOF标志位来标志报文的起始 - 帧起始由1
个显性位构成,标志着报文的开始,并在总线上起着同步的作用
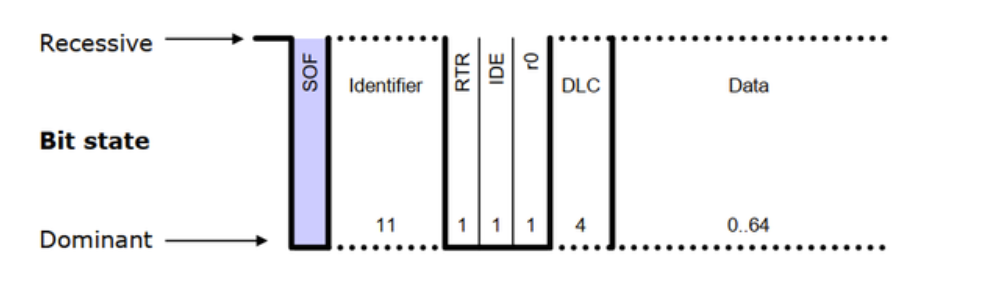
2.2 仲裁段
- 与传统CAN相比,CAN FD取消了远程帧,用RRS位替换了RTR位,为常显性;
RTR(Remote Transmission Request Bit):远程发送请求位,RTR位在数据帧里必须是显性,而在远程帧里为隐性RRS(Remote Request Substitution):远程请求替换位,即传统CAN中的RTR位,CAN FD中为常显性
IDE位仍为标准帧和扩展帧标志位,若标准帧与扩展帧具有相同的前 11 位 ID,那么标准帧将会由于 IDE 位为 0,优先获得总线;
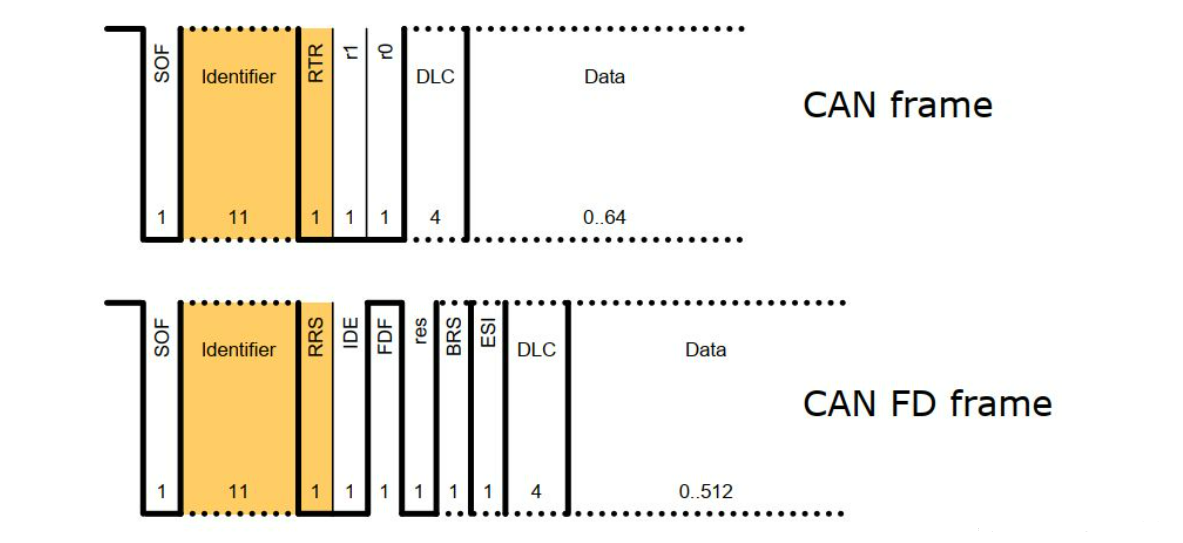
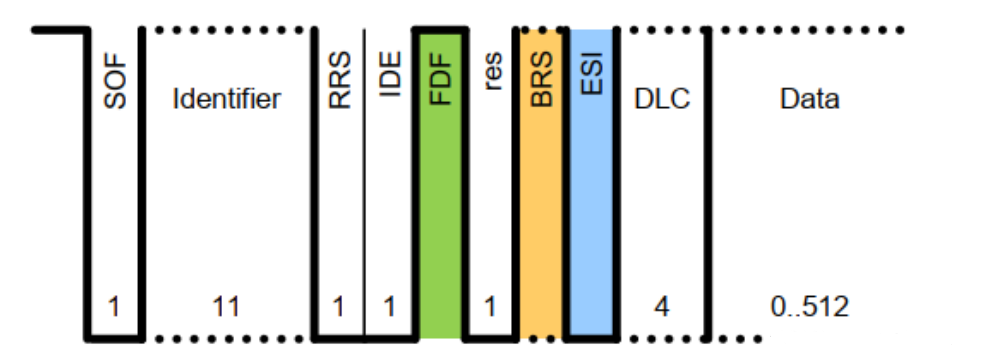
2.3 控制段
- 控制段中CANFD与CAN有着相同的
IDE,res,DLC位;同时增加了三个控制bit位,FDF、BRS、ESI; FDF(Flexible Data Rate Format):原CAN数据帧中的保留位r,FDF常为隐性,表示CAN FD 报文;BRS(Bit Rate Switch):位速率转换开关,当BRS为显性位时数据段的位速率与仲裁段的位速率一致,当BRS为隐性位时数据段的位速率高于仲裁段的位速率;ESI(Error State Indicator):错误状态指示,主动错误时发送显性位,被动错误时发送隐性位;
- DLC同样是4bit表示数据段的长度,对应的关系如下:
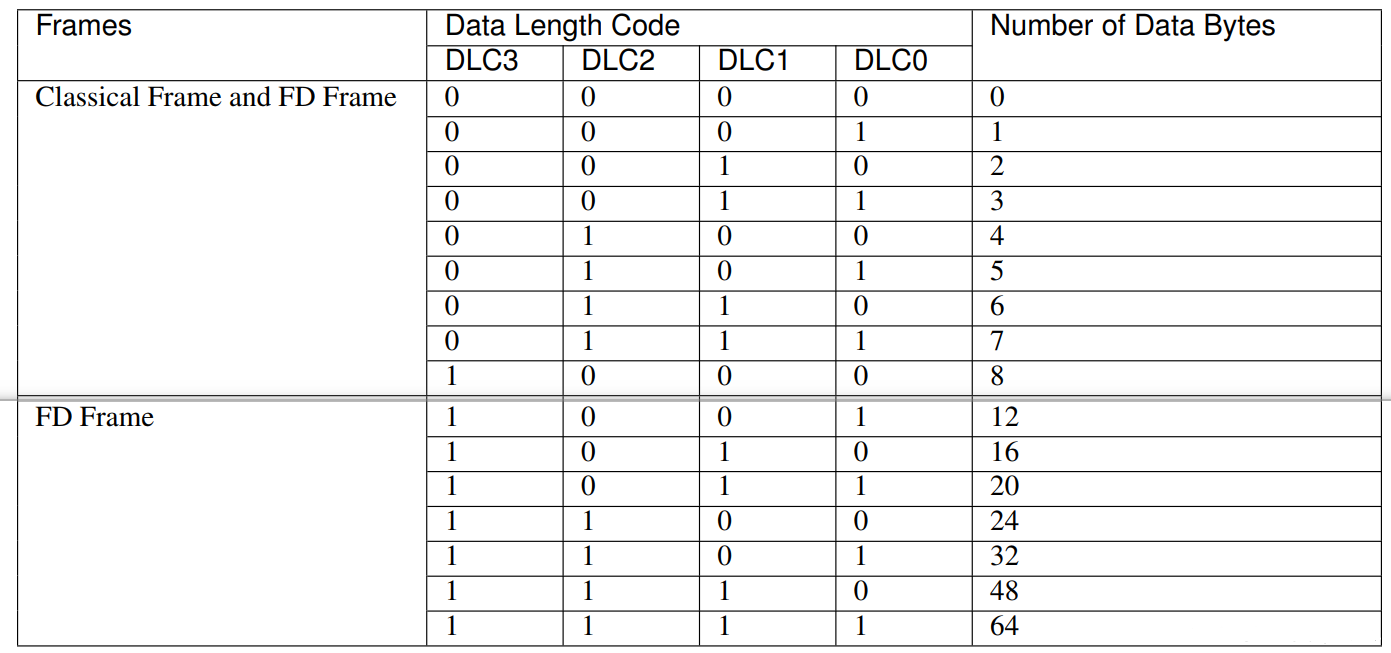
2.4 数据段
- 数据段即为传输的具体数据内容
- CAN FD不仅能支持传统的0-8字节报文,同时可以支持12, 16, 20, 24, 32, 48, 64字节
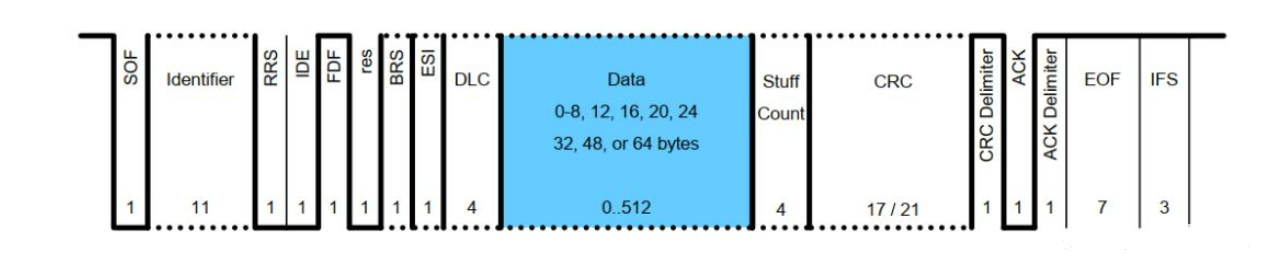
2.5 CRC段
-
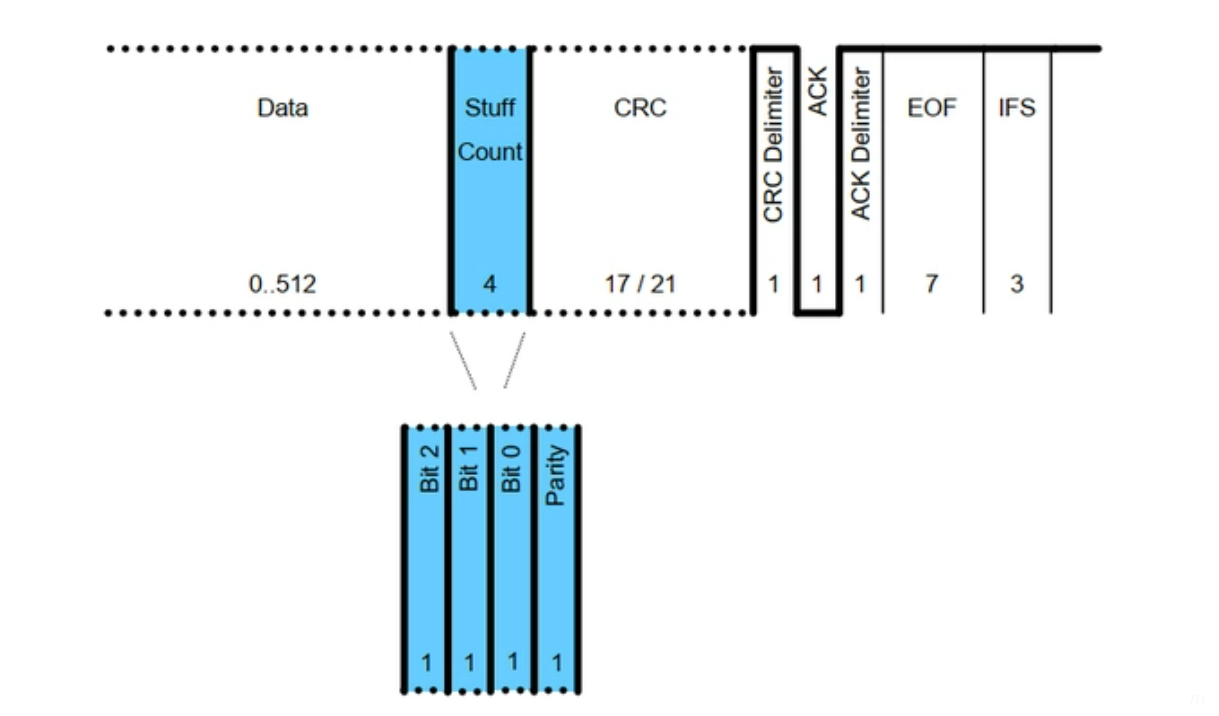
为了避免位填充对CRC的影响,CAN FD在CRC场中增加了
stuff count记录填充位的个数对应8的模,并用格雷码表示,还增加了奇偶校验位;且在CRC中加入了填充位FSB(fixed stuff-bit) -
Stuff Count由以下两个元素组成:
格雷码计算:CRC区域之前的填充位数除以8,得到的余数(Stuff bit count modulo 8)进行格雷码计算得到的值(Bit 0-2)奇偶校验(parity):通过格雷码计算后的值的奇偶校验(偶校验)
-
CAN FD对CRC算法进行了改进,CRC对填充位也加入了计算;在校验部分为避免有连续位超过6个,就确定在第一位以及以后
每4位添加一个填充位加以分割,这个填充位的值是上一位的反码,作为格式检查,如果填充位不是上一位的反码,就作出错处理。 -
CAN的CRC的位数是15位,而在CAN FD中,CRC场扩展到了21位,如下:
- 当传输数据为
0~8字节时:CRC 15位 - 当传输数据为
9~16字节时:CRC 17位 - 当传输数据为
17~64个字节时:CRC 21位
- 当传输数据为
2.6 ACK段
- 与CAN相比,在CAN FD中最多可接受
2个位时间有效的ACK,允许1个额外的位时间来补偿收发器相移和传播延迟 - 由从高速的数据场到慢速的仲裁场时,时钟切换会引起收发器相移和总线传播延迟;为了补偿其相移和延迟,相比传统的CAN,在CAN FD中多加了这额外的1位时间
- 在ACK之后,发送ACK界定符,这是一个表示ACK结束的分隔符,用
1位隐性位表示
2.7 帧结束
- 与CAN一样,CAN FD的帧结尾也为
连续7位的隐性位
3. 如何从传统的CAN升级到CAN FD
- 尽管 CANFD 继承了绝大部分传统 CAN 的特性,但是从传统 CAN 到 CANFD 的升级, 仍需要做很多的工作,主要包括:
- 在
硬件和工具方面,要使用 CANFD,首先要选取支持 CANFD 的 CAN 控制器和收发器,还要选取新的网络调试和监测工具; - 在
网络兼容性方面,对于传统 CAN 网段的部分节点需要升级到 CANFD 的情况要特别注意,由于帧格式不一致的原因,CANFD 节点可以正常收发传统 CAN 节点报文,但是传统 CAN 节点不能正常收发 CANFD 节点的报文;
- 在
感谢阅读 若有错误 欢迎指正 !!!
推荐阅读
相关标签

