
- 1从阿里云效codeup克隆代码仓库到本地_阿里云拉取代码到本地
- 2分享几个找空投项目的网址,值得收藏
- 3fastDFS分布式文件系统下载安装测试_下载fastdfs-nginx-module
- 4SpringCloud集成Nacos_spring cloud集成nacos
- 5java securerandom,Java中生成随机数Random、ThreadLocalRandom、SecureRandom
- 6毕业设计:基于深度学习的驾驶员分心行为检测系统 人工智能_国内外驾驶员异常行为检测平台
- 7【数据集标注制作】视频剪切标注1——类DarkLabel软件
- 8面试题:Rabbitmq怎么保证消息的可靠性?
- 9探秘ChatDev:新一代对话式AI开发平台
- 10全网最好解决中国hugggingface.co无法访问问题_无法ping到huggingface.co
python机器人编程——差速AGV机器人VREP仿真python联动控制实现_基于机器人的python仿真
赞
踩
一、前言
本篇是《python机器人编程——差速机器人小车的控制,控制模型、轨迹跟踪,轨迹规划、自动泊车》系列的姊妹篇。来通过python去实现vrep下仿真小车的联动控制,为该篇提出的无人控制方法提供一个验证的环境,从而可以完善相应的控制方式,进一步深入探索。要实现的预期效果如下:

二、差速小车的python联动
这里,我们选择一个vrep里面已有的差速小车模型作为控制对象,它在里面的名字叫做先锋P3(“Pioneer_p3dx”),把它拖进来后,基本的脚本已经编好了。只要加入远程API相关的函数,和与python通信的规约就可以了,这块内容,跟之前机械臂的联动是一个原理,已经在《python机器人编程——VREP数字孪生四轴机械臂联合仿真》中进行了详细的描述。这里不再赘述。
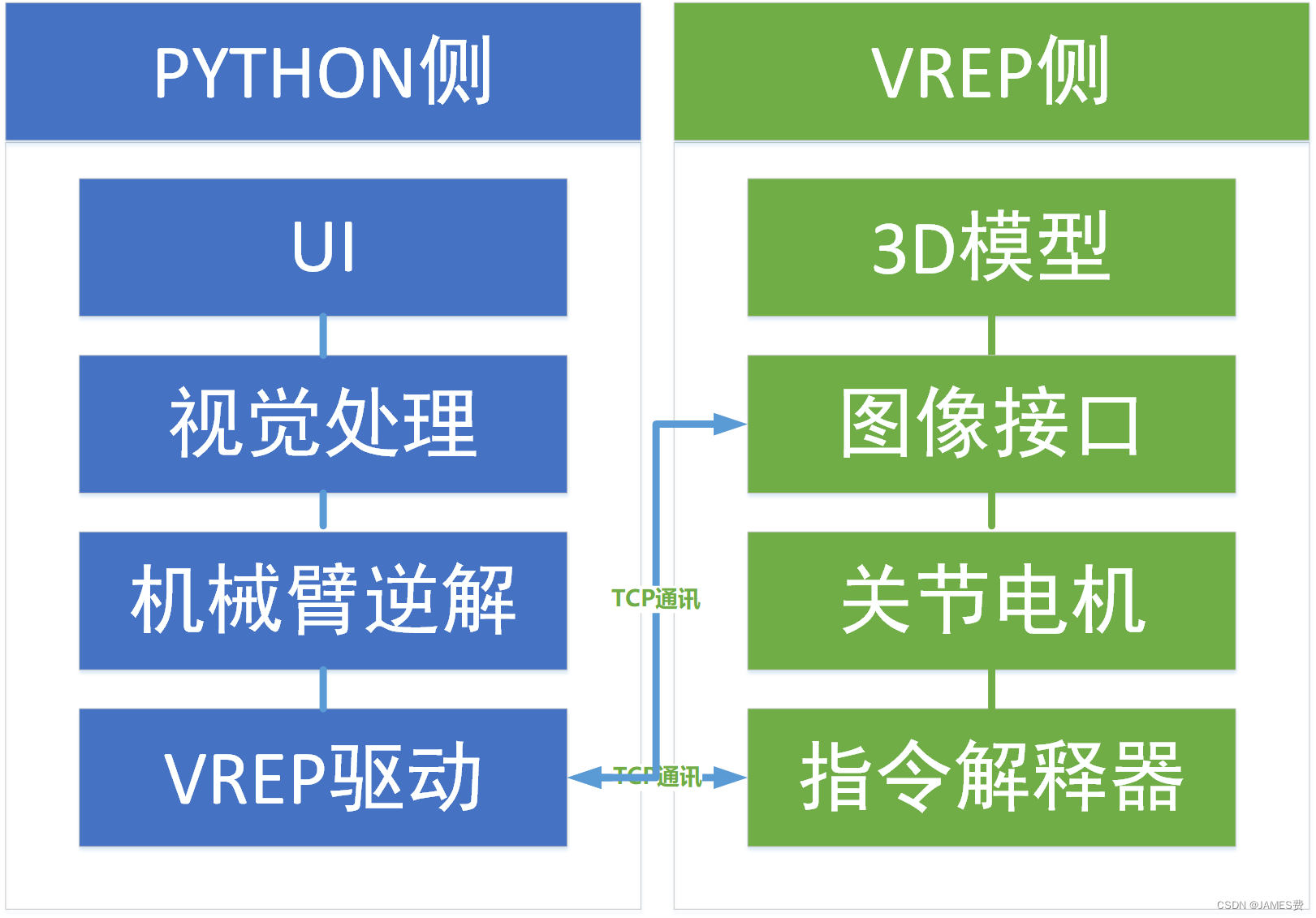
控制小车我们还是通过类似G代码的方式实现python侧和vrep侧的信息传输。例如:通过发送字符串“G80 G0 L* R** \r”的样式,L后面代表下发的左轮速度,R为后轮速度*。停止等指令方式类似,python如下:
def send_LR(clientID,J1,J2): """ 控制指令 """ speeds='G80 G0 L'+str(J1)+' R'+str(J2)+' \r' sim.simxWriteStringStream(clientID,"fromClient",str.encode(speeds),sim.simx_opmode_oneshot) return True def stop_car(clientID): """ 停止指令 """ sendangles='G80 S0 \r' sim.simxWriteStringStream(clientID,"fromClient",str.encode(sendangles),sim.simx_opmode_oneshot) def moveon_car(clientID): """ 继续移动指令 """ sendangles='G80 C0 \r' sim.simxWriteStringStream(clientID,"fromClient",str.encode(sendangles),sim.simx_opmode_oneshot)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
另外,需要在vrep侧对所接受的指令进行解析,控制指令、停止指令、继续指令等,只要做一下稍微的lau代码就可以:
if string.sub(dat,1,6)=='G80 G0' then --car verocity set code G90 G1 L2 R2 print('receive :',dat) local order = split(dat,' ') local lv=tonumber(string.sub(order[3],2,string.len(order[3]))) local rv=tonumber(string.sub(order[4],2,string.len(order[4]))) print('receive G90 G0:',lv,rv) bvLeft=vLeft bvRight=vRight vLeft=lv vRight=rv dat='' end if string.sub(dat,1,6)=='G80 G1' then --car verocity ask code G90 G1 L2 R2 print('receive G80 G1:') sim.setStringSignal('toClient','G80 G1 L'..tostring(vLeft)..' R'..tostring(vRight)..' \r ') print('toClient','G80 G1 L'..tostring(vLeft)..' R'..tostring(vRight)..' \r ') dat='' end if string.sub(dat,1,6)=='G80 S0' then --car Stop print('receive G80 S0:') sim.setStringSignal('toClient','G80 S0') if vLeft-vRight~=0 and vLeft+vRight~=0 then bvLeft=vLeft bvRight=vRight end vLeft=0 vRight=0 print('send G80 S0:') dat='' end if string.sub(dat,1,6)=='G80 C0' then --car continue move print('receive G80 C0:') sim.setStringSignal('toClient','G80 C0') vLeft=bvLeft vRight=bvRight print('send G80 C1:') dat='' end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43

三、小车的人机界面控制
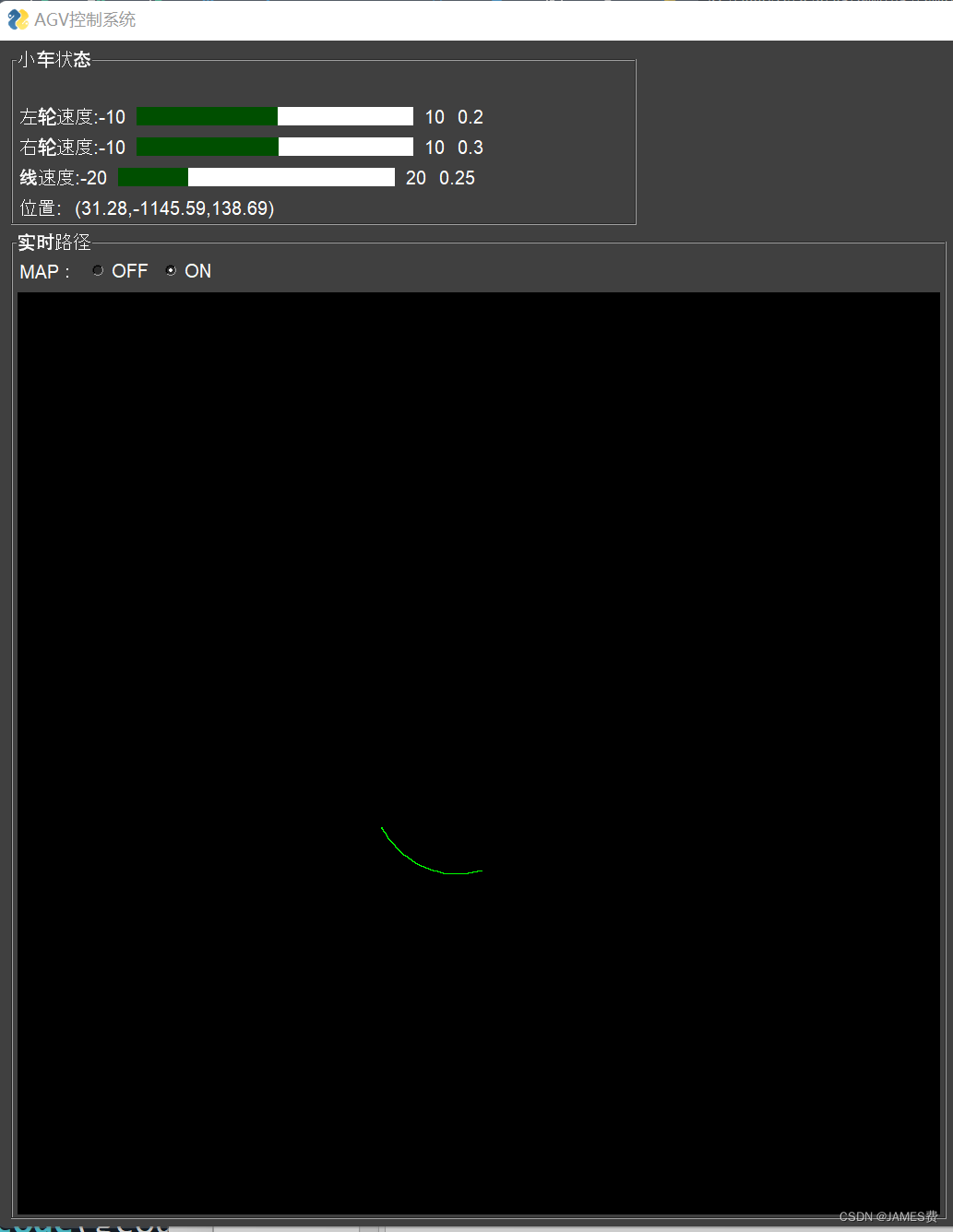
实时监控
这篇不进行无人驾驶控制,实现的是基础的人机界面控制,差速小车就只有两个控制量,左轮的速度和右轮的速度,只要向小车定时下发左右轮的速度就可以控制小车了,为了能够监视小车的轨迹,将来用于轨迹自动跟踪等,我加入了轨迹的实时绘制,另外对小车的状态轮速和坐标进行了实时监控,如下效果:
手操控制
控制就通过不断调整两个轮子的速度来,并进行实时派发,起到远程控制小车的作用。
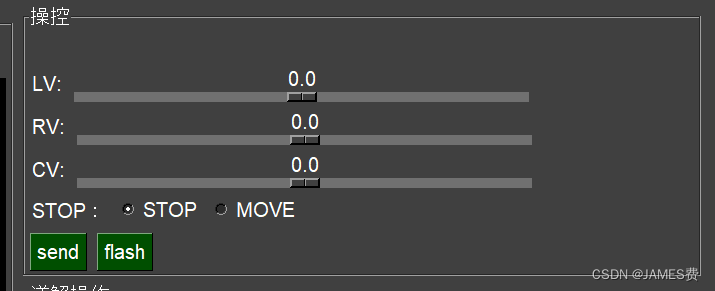
这里,增加了停止和继续的指令,用于及时停止小车,不至于开出边界掉落,后面还要根据之前对小车分析的集中状态,再完善和丰富一下控制指令:
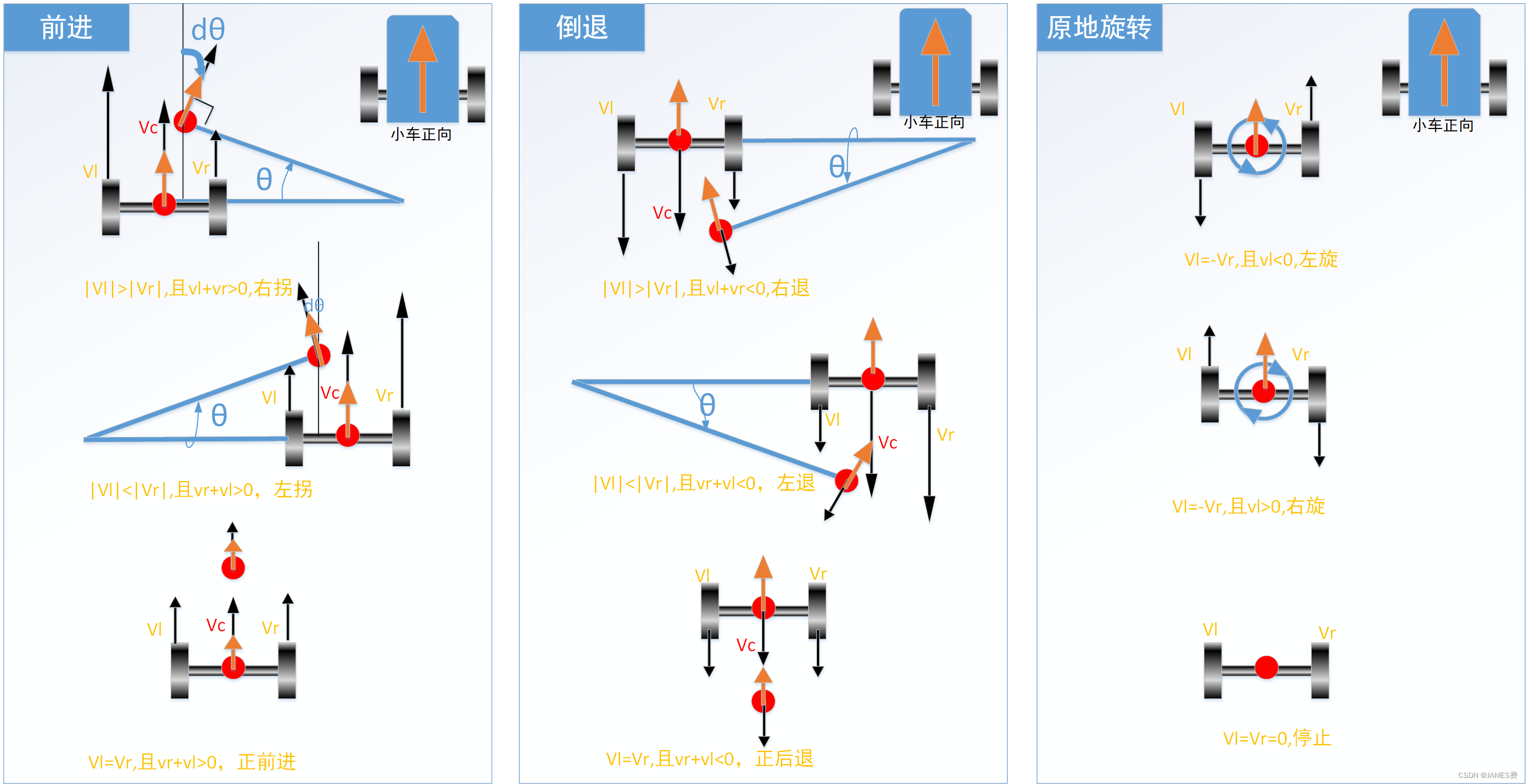
四、后续工作
以上只是实现了小车的简单控制,为实现无人驾驶功能,还需要对小车的物理结构和它的运动模型进行适配,并且要通过多次试验把控制模型的参数给确定好,这个工作我们在《python机器人编程——差速机器人小车的控制,控制模型、轨迹跟踪,轨迹规划、自动泊车》系列进行继续深入。
本篇源码,完善后发到网上。

