
热门标签
热门文章
- 1漏洞&修复规范描述_httplimitreqmodule and httplimitzonemodule
- 2短视频seo抖音矩阵源码开发搭建技术解析_抖音矩阵一键发布 用的什么接口
- 3复旦微JFM7VX690计算后IO接口模块,用于雷达信号处理、数据处理等需要高速密集计算的应用场景
- 4GPT实战系列-LangChain如何构建基通义千问的多工具链_通义千问 集成langchain好多样例跑不通
- 5微信公众号&小程序 -- 获取并解密用户数据(获取openId、unionId)
- 6android studio简单实现登录注册界面的跳转,新手教学android期末项目点击简单跳转界面的实现_android登录跳转简单界面
- 7chatGPT与传统搜索引擎的比较_chatgpt跟csdn对比
- 8OAuth 2.1 带来了哪些变化_说透oauth 2.1
- 9inpaint-anything:分割任何东西遇到图像修复_inpaint anything macos 12错误
- 10PX4 OffBoard Control_offboard_control
当前位置: article > 正文
机器人前馈控制MATLAB实现
作者:Monodyee | 2024-04-28 12:51:20
赞
踩
机器人前馈控制MATLAB实现
在机器人控制中,前馈控制是一种常用的方法,用于补偿系统中的已知动态。前馈控制通常与反馈控制结合使用,以提高系统的跟踪性能和响应速度。在MATLAB中实现机器人前馈控制涉及几个步骤,包括系统建模、设计前馈控制器、实现控制算法以及仿真验证。
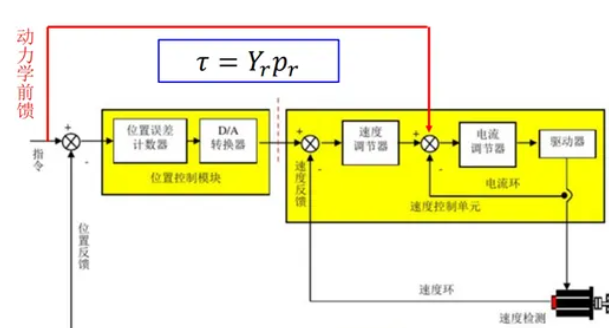
前馈控制是一种预测控制,通过对系统当前工作状态的了解,预测出下一阶段系统的运行状况。前馈的缺点是在使用时需要对系统有精确的了解,只有了解了系统模型才能有针对性的给出预测补偿。但在实际工程中并不是所有的对象都是可得到精确模型的,而且很多控制对象在运行的同时自身的结构也在发生变化。所以仅用前馈并不能达到良好的控制品质。这时就需要加入反馈,反馈的特点是根据偏差来决定控制输入,不管对象的模型如何,只要有偏差就根据偏差进行纠正,可以有效的消除稳态误差。
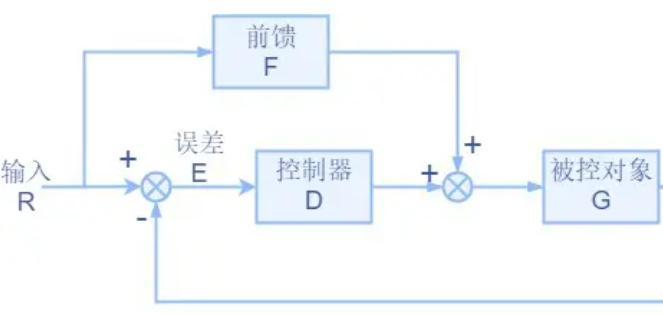
前馈-反馈综合控制结合二者的优点,可以提高系统响应速度。从前馈控制角度看,由于增加了反馈控制,降低了对前馈控制模型精度的要求;从反馈控制角度看,前馈控制作用对主要干扰及时进行粗调,大大减少反馈控制的负担。
https://www.cnblogs.com/wdzeng/p/11633508.html![]() https://www.cnblogs.com/wdzeng/p/11633508.html
https://www.cnblogs.com/wdzeng/p/11633508.html
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Monodyee/article/detail/502328
推荐阅读
相关标签

