
- 1Flink 第8.4章 Flink Join 精讲
- 2Docker 常用命令_docker pull from
- 3Java发送Http请求,解析html返回_java中method = requestmethod.post一个添加接口f12页面返回html代
- 4如果你觉得功能测试只是点点点,那请离开测试这行_点点点就是功能测试吗
- 5macbook 系统时间无法自动调整的解决办法_mac时间无法自动校准
- 6【网站项目】个人需求和地域特色的外卖推荐系统
- 7csdn积分怎么获得_csdn积分怎么得
- 8pycharm安装opencv-python报错_unknown build type 'ament_python' for package 'ope
- 9第72天:漏洞发现-Web框架中间件&联动&Goby&Afrog&Xray&Awvs&Vulmap
- 10苏炫杰全国计算机等级考试,高二升高三的主题班会
Python基于CycleGAN&pix2pix的黑白图像AI上色(源码&部署教程)_cyclegan的loadsize
赞
踩
1.项目背景
自从GAN技术发展以来,许多新奇的应用都得到了落地,本次我们来介绍其中一个小应用,就是黑白图像上色。想必大家在网上经常看到一些给黑白图像上色的视频,可以修复早期的黑白影像,背后的技术就是GAN,下面的动图就是我们本次项目实战的案例图,对人像、照片、建筑图进行上色。
2.原理简介
本次我们来实现基于Pix2Pix的黑白图片上色,Pix2Pix是一个通用的框架,可以适用于任何的图像翻译类任务,下面我们首先来介绍其原理。
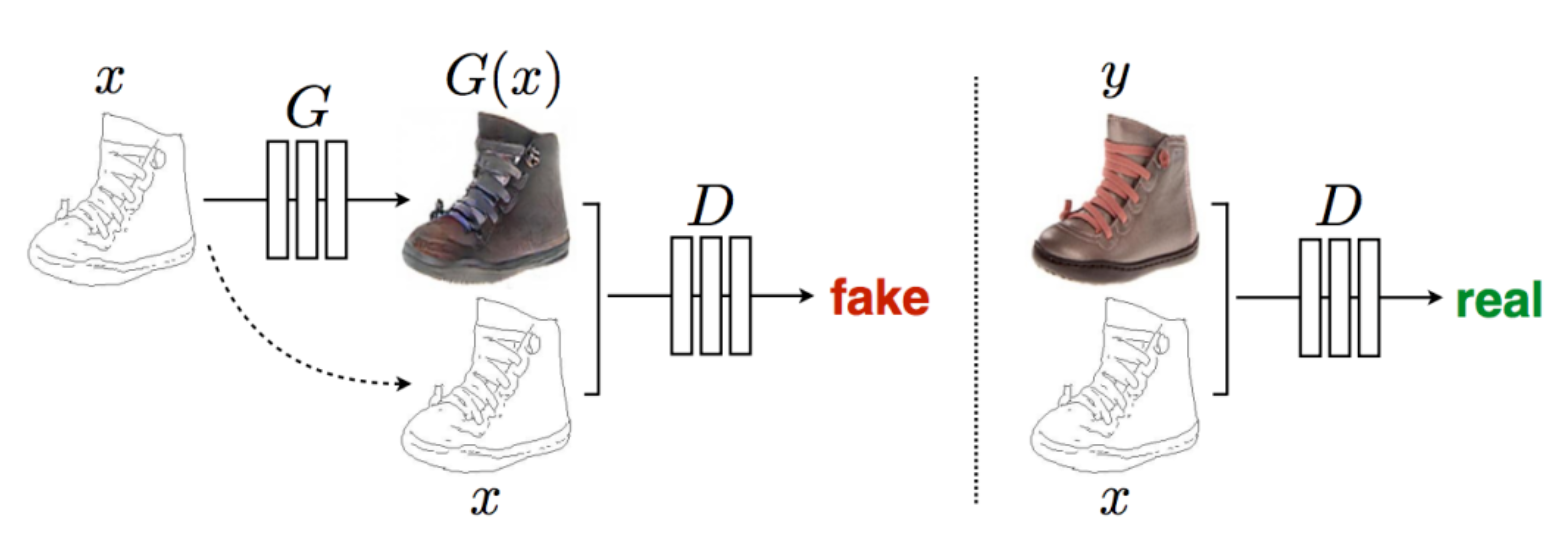
它的生成器和判别器的输入都不是噪声,而是真实的图片。输入图x经过生成器G之后得到生成图片G(x),然后一边将G(x)和x一起作为判别器的输入,另一边将真实标注y和x一起作为判别器的输入,前者判别器输出为fake,后者为real。
G就是一个常见的编解码结构,D就是一个普通分类器,那这样的生成式框架有什么优势呢?
作者们认为,一般的编解码结构可以解决低频成分的生成,但是高频的细节不够理想,而GAN则擅长解决高频成分的生成。总的生成器损失函数为一个标准的条件GAN损失加上L1重建损失,分别定义如下:
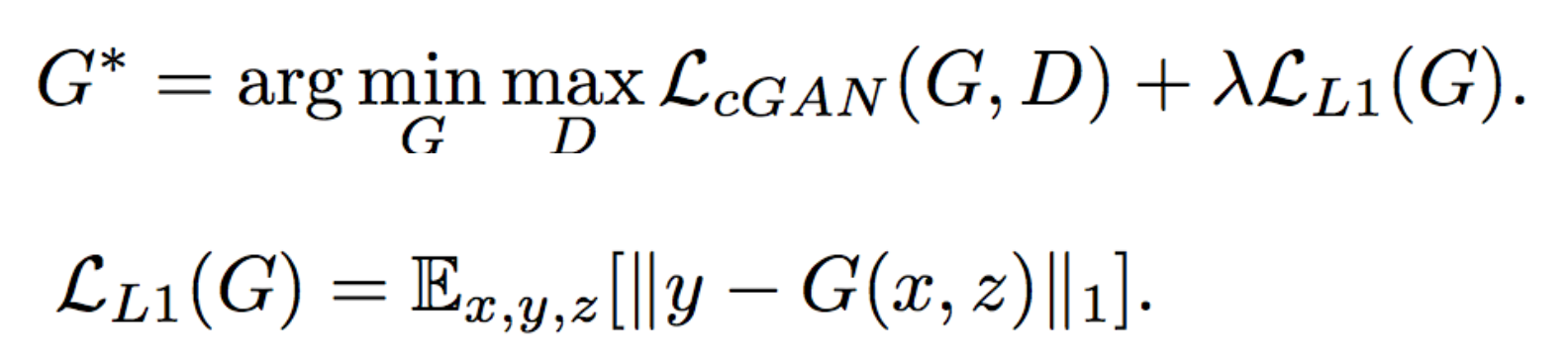
具体实现我们看接下来的代码。
3.数据预处理
对于图像上色任务来说,在CIELab颜色空间比在RGB颜色空间会有更好的效果,因为CIELab颜色空间中的L通道只有灰度信息,而a和b通道只有颜色信息,实现了亮度与颜色的分离。
下图展示了CIELab颜色中的颜色分布,相比于其他彩色空间,有更加线性和均匀的分布特性。

因此,在数据读取模块中,需要将RGB图像转换到CIELab颜色空间,然后构建成对的数据。下面我们来查看数据读取类中的核心功能函数,包括初始化函数__init__与数据迭代器__getitem__。
数据类定义如下
class ColorizationDataset(BaseDataset): def __init__(self, opt): BaseDataset.__init__(self, opt) self.dir = os.path.join(opt.dataroot, opt.phase) self.AB_paths = sorted(make_dataset(self.dir, opt.max_dataset_size)) assert(opt.input_nc == 1 and opt.output_nc == 2 and opt.direction == 'AtoB') self.transform = get_transform(self.opt, convert=False) def __getitem__(self, index): path = self.AB_paths[index] im = Image.open(path).convert('RGB') ## 读取RGB图 im = self.transform(im) ## 进行预处理 im = np.array(im) lab = color.rgb2lab(im).astype(np.float32) ## 将RGB图转换为CIELab图 lab_t = transforms.ToTensor()(lab) L = lab_t[[0], ...] / 50.0 - 1.0 ## 将L通道(index=0)数值归一化到-1到1之间 AB = lab_t[[1, 2], ...] / 110.0 ## 将A,B通道(index=1,2)数值归一化到0到1之间 return {'A': L, 'B': AB, 'A_paths': path, 'B_paths': path}

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
在上面的__getitem__函数中,首先使用了PIL包读取图片,然后将其预处理后转换到CIELab空间中。读取后的L通道的数值范围是在0~100之间,通过处理后归一化到-1和1之间。读取后的A和B的通道的数值范围是在0~110之间,通过处理后归一化到0和1之间。
另外在__init__函数中进行了预处理,调用了get_transform函数,它主要包含了图像缩放,随机裁剪,随机翻转,减均值除以方差等操作,由于是比较通用的操作,这里不再对关键代码进行解读。
4.生成器网络
生成器使用的是U-Net结构,在该开源框架中也还可以选择残差结构,不过我们使用U-Net完成实验任务
UNet生成器定义如下
class UnetGenerator(nn.Module): def __init__(self, input_nc, output_nc, num_downs, ngf=64, norm_layer=nn.BatchNorm2d, use_dropout=False): super(UnetGenerator, self).__init__() unet_block = UnetSkipConnectionBlock(ngf*8,ngf*8, input_nc=None, submodule=None, norm_layer=norm_layer, innermost=True) # add the innermost layer for i in range(num_downs - 5): unet_block=UnetSkipConnectionBlock(ngf*8,ngf*8,input_nc=None, submodule=unet_block, norm_layer=norm_layer, use_dropout=use_dropout) ## 逐步减小通道数,从ngf * 8到ngf unet_block=UnetSkipConnectionBlock(ngf*4,ngf*8,input_nc=None, submodule=unet_block, norm_layer=norm_layer) unet_block=UnetSkipConnectionBlock(ngf*2,ngf*4,input_nc=None, submodule=unet_block, norm_layer=norm_layer) unet_block=UnetSkipConnectionBlock(ngf,ngf*2,input_nc=None, submodule=unet_block, norm_layer=norm_layer) self.model=UnetSkipConnectionBlock(output_nc,ngf,input_nc=input_nc, submodule=unet_block, outermost=True, norm_layer=norm_layer) ## 最外层 def forward(self, input): """Standard forward""" return self.model(input)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
其中重要参数解释如下:input_nc 是输入通道,output_nc是输出通道,num_downs 是降采样次数,为2^num_downs,ngf是最后一层通道数,norm_layer是归一化层。
UnetSkipConnectionBlock是跳层连接的模块,它的定义如下: class UnetSkipConnectionBlock(nn.Module): def __init__(self, outer_nc, inner_nc, input_nc=None, submodule=None,outermost=False,innermost=False, norm_layer=nn.BatchNorm2d, use_dropout=False): super(UnetSkipConnectionBlock, self).__init__() self.outermost = outermost if type(norm_layer) == functools.partial: use_bias = norm_layer.func == nn.InstanceNorm2d else: use_bias = norm_layer == nn.InstanceNorm2d if input_nc is None: input_nc = outer_nc downconv = nn.Conv2d(input_nc, inner_nc, kernel_size=4, stride=2, padding=1, bias=use_bias) downrelu = nn.LeakyReLU(0.2, True) downnorm = norm_layer(inner_nc) uprelu = nn.ReLU(True) upnorm = norm_layer(outer_nc) if outermost: upconv = nn.ConvTranspose2d(inner_nc * 2, outer_nc, kernel_size=4, stride=2, padding=1) down = [downconv] up = [uprelu, upconv, nn.Tanh()] model = down + [submodule] + up elif innermost: upconv = nn.ConvTranspose2d(inner_nc, outer_nc, kernel_size=4, stride=2, padding=1, bias=use_bias) down = [downrelu, downconv] up = [uprelu, upconv, upnorm] model = down + up else: upconv = nn.ConvTranspose2d(inner_nc * 2, outer_nc, kernel_size=4, stride=2, padding=1, bias=use_bias) down = [downrelu, downconv, downnorm] up = [uprelu, upconv, upnorm] ##是否使用dropout if use_dropout: model = down + [submodule] + up + [nn.Dropout(0.5)] else: model = down + [submodule] + up self.model = nn.Sequential(*model) def forward(self, x): if self.outermost:#最外层直接输出 return self.model(x) else:#添加跳层 return torch.cat([x, self.model(x)], 1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
其中outer_nc是外层通道数,inner_nc是内层通道数,input_nc是输入通道数,submodule即前一个子模块,outermost判断是否是最外层,innermost判断是否是最内层,norm_layer即归一化层,user_dropout即是否使用dropout。
对于pix2pix模型,使用的归一化层默认为nn.BatchNorm2d,当batch=1时,它实际上与InstanceNorm等价。
5.判别器定义
参考该博客判别器的定义,判别器是一个分类模型,不过在前面我们说了,它的输入不是整张图片,而是图像块,因此判别器的输出不是单独的一个数,而是多个图像块的概率图,最终将其相加得到完整的概率,定义如下:
PatchGAN的定义如下
class NLayerDiscriminator(nn.Module): def __init__(self, input_nc, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d): super(NLayerDiscriminator, self).__init__() if type(norm_layer) == functools.partial: ##判断归一化层类别,如果是BN则不需要bias use_bias = norm_layer.func == nn.InstanceNorm2d else: use_bias = norm_layer == nn.InstanceNorm2d kw = 4 ##卷积核大小 padw = 1 ##填充大小 ## 第一个卷积层 sequence = [nn.Conv2d(input_nc, ndf, kernel_size=kw, stride=2, padding=padw), nn.LeakyReLU(0.2, True)] nf_mult = 1 nf_mult_prev = 1 ## 中间2个卷积层 for n in range(1, n_layers): ##逐渐增加通道宽度,每次扩充为原来两倍 nf_mult_prev = nf_mult nf_mult = min(2 ** n, 8) sequence += [ nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult, kernel_size=kw, stride=2, padding=padw, bias=use_bias), norm_layer(ndf * nf_mult), nn.LeakyReLU(0.2, True) ] nf_mult_prev = nf_mult nf_mult = min(2 ** n_layers, 8) ## 第五个卷积层 sequence += [ nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult, kernel_size=kw, stride=1, padding=padw, bias=use_bias), norm_layer(ndf * nf_mult), nn.LeakyReLU(0.2, True) ] ## 输出单通道预测结果图 sequence += [nn.Conv2d(ndf * nf_mult, 1, kernel_size=kw, stride=1, padding=padw)] self.model = nn.Sequential(*sequence) def forward(self, input): return self.model(input)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
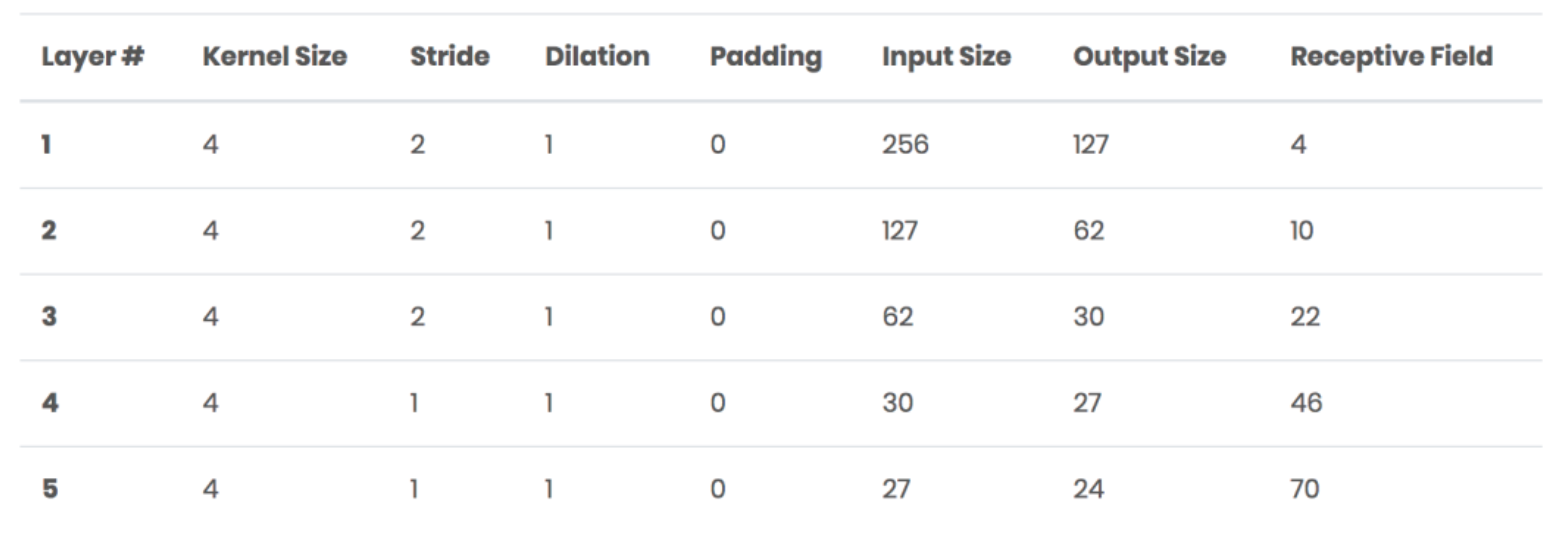
其中input_nc是输入图通道,ndf是最后一个卷积层通道,n_layers是判别器层数,norm_layer是归一化层类型。从代码可以看出,默认包括了5层卷积,其中卷积核大小都为44,前面3层的stride=2,后两个卷积层的stride=1,总的感受野为7070,这也是前面所说的实际上是取70*70的块的原因,各层输入输出以及感受野统计情况如下:
6.损失函数定义
接下来我们再看损失函数的定义。
class GANLoss(nn.Module): def __init__(self, gan_mode, target_real_label=1.0, target_fake_label=0.0): #gan_model,损失类型,支持原始损失,lsgan,wgangp super(GANLoss, self).__init__() self.register_buffer('real_label', torch.tensor(target_real_label)) self.register_buffer('fake_label', torch.tensor(target_fake_label)) self.gan_mode = gan_mode if gan_mode == 'lsgan': self.loss = nn.MSELoss() elif gan_mode == 'vanilla': self.loss = nn.BCEWithLogitsLoss() elif gan_mode in ['wgangp']: self.loss = None else: raise NotImplementedError('gan mode %s not implemented' % gan_mode) #将标签转为与预测结果图同样大小 def get_target_tensor(self, prediction, target_is_real): if target_is_real: target_tensor = self.real_label else: target_tensor = self.fake_label return target_tensor.expand_as(prediction) ##返回损失 def __call__(self, prediction, target_is_real): if self.gan_mode in ['lsgan', 'vanilla']: target_tensor = self.get_target_tensor(prediction, target_is_real) loss = self.loss(prediction, target_tensor) elif self.gan_mode == 'wgangp': if target_is_real: loss = -prediction.mean() else: loss = prediction.mean() return loss
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
以上代码实现了对几种常见的GAN对抗损失的计算。
7.完整结构定义
定义好判别器和生成器之后,参考该博客完整的pix2pix模型的定义,如下:
class Pix2PixModel(BaseModel):
##配置默认参数 def modify_commandline_options(parser, is_train=True): ##默认使用batchnorm,网络结构为unet_256,使用成对的(aligned)图片数据集 parser.set_defaults(norm='batch', netG='unet_256', dataset_mode='aligned') if is_train: parser.set_defaults(pool_size=0, gan_mode='vanilla')#使用经典GAN损失 parser.add_argument('--lambda_L1', type=float, default=100.0, help='weight for L1 loss')#L1损失权重为100 def __init__(self, opt): BaseModel.__init__(self, opt) self.loss_names = ['G_GAN', 'G_L1', 'D_real', 'D_fake'] ##损失 self.visual_names = ['real_A', 'fake_B', 'real_B'] ##中间结果图 if self.isTrain: self.model_names = ['G', 'D'] else: # during test time, only load G self.model_names = ['G'] #生成器和判别器定义 self.netG = networks.define_G(opt.input_nc, opt.output_nc, opt.ngf, opt.netG, opt.norm,not opt.no_dropout, opt.init_type, opt.init_gain, self.gpu_ids) # 判别器定义,输入RGB图和生成器图的拼接 if self.isTrain: self.netD = networks.define_D(opt.input_nc + opt.output_nc, opt.ndf, opt.netD, opt.n_layers_D, opt.norm, opt.init_type, opt.init_gain, self.gpu_ids) if self.isTrain: #损失函数定义,GAN标准损失和L1重建损失 self.criterionGAN = networks.GANLoss(opt.gan_mode).to(self.device) self.criterionL1 = torch.nn.L1Loss() # 优化器,使用Adam self.optimizer_G = torch.optim.Adam(self.netG.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999)) self.optimizer_D = torch.optim.Adam(self.netD.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999)) self.optimizers.append(self.optimizer_G) self.optimizers.append(self.optimizer_D) def set_input(self, input): ## 输入预处理,根据不同方向进行A,B的设置 AtoB = self.opt.direction == 'AtoB' self.real_A = input['A' if AtoB else 'B'].to(self.device) self.real_B = input['B' if AtoB else 'A'].to(self.device) self.image_paths = input['A_paths' if AtoB else 'B_paths'] # 生成器前向传播 def forward(self): self.fake_B = self.netG(self.real_A) #G(A) # 判别器损失 def backward_D(self): #假样本损失 fake_AB = torch.cat((self.real_A, self.fake_B), 1) pred_fake = self.netD(fake_AB.detach()) self.loss_D_fake = self.criterionGAN(pred_fake, False) #真样本损失 real_AB = torch.cat((self.real_A, self.real_B), 1) pred_real = self.netD(real_AB) self.loss_D_real = self.criterionGAN(pred_real, True) #真样本和假样本损失平均 self.loss_D = (self.loss_D_fake + self.loss_D_real) * 0.5 self.loss_D.backward() # 生成器损失 def backward_G(self): # GAN损失 fake_AB = torch.cat((self.real_A, self.fake_B), 1) pred_fake = self.netD(fake_AB) self.loss_G_GAN = self.criterionGAN(pred_fake, True) #重建损失 self.loss_G_L1 = self.criterionL1(self.fake_B, self.real_B) * self.opt.lambda_L1 #损失加权平均 self.loss_G = self.loss_G_GAN + self.loss_G_L1 self.loss_G.backward() def optimize_parameters(self): self.forward() # 计算G(A) # 更新D self.set_requires_grad(self.netD, True) #D self.optimizer_D.zero_grad() #D梯度清零 self.backward_D() #计算 D梯度 self.optimizer_D.step() #更新D权重 # 更新G self.set_requires_grad(self.netD, False) #优化G时无须迭代D self.optimizer_G.zero_grad() # G梯度清零 self.backward_G() # 计算 G梯度 self.optimizer_G.step() #更新G权重
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
以上就完成了工程中核心代码的解读,接下来我们对模型进行训练和测试。
8.数据集的准备
首先我们准备彩色数据集A
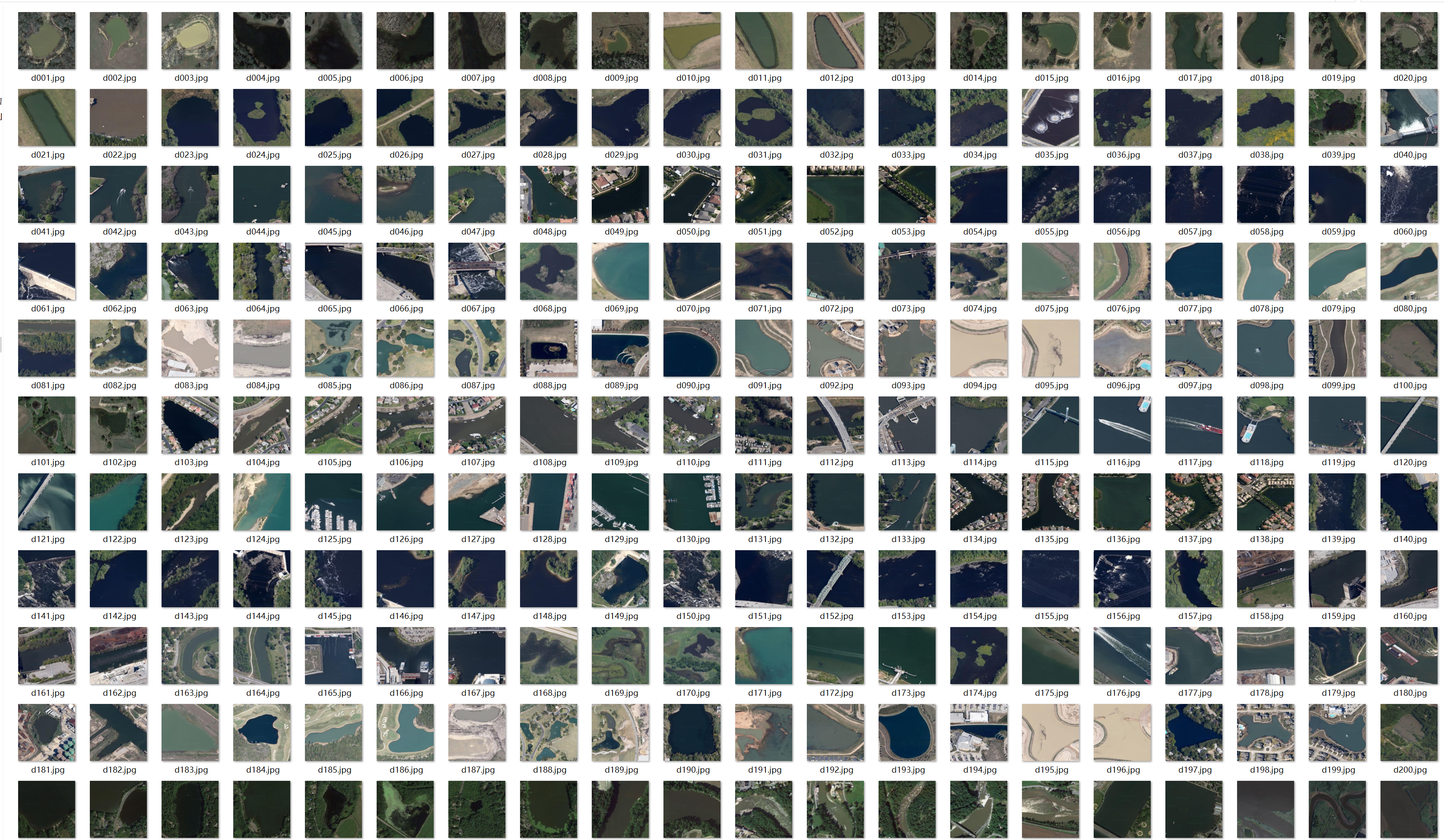
然后我们准备黑白数据集B
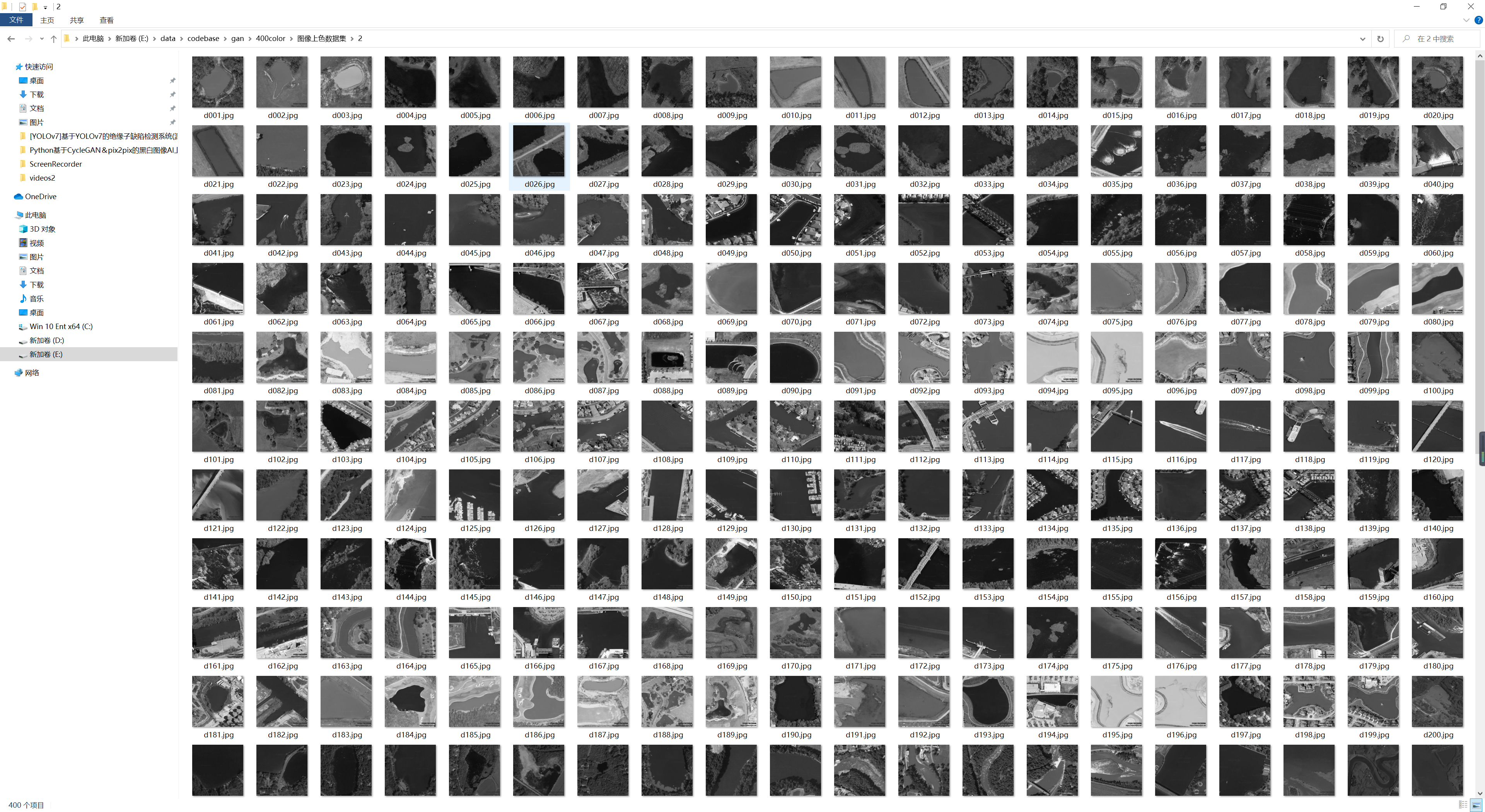
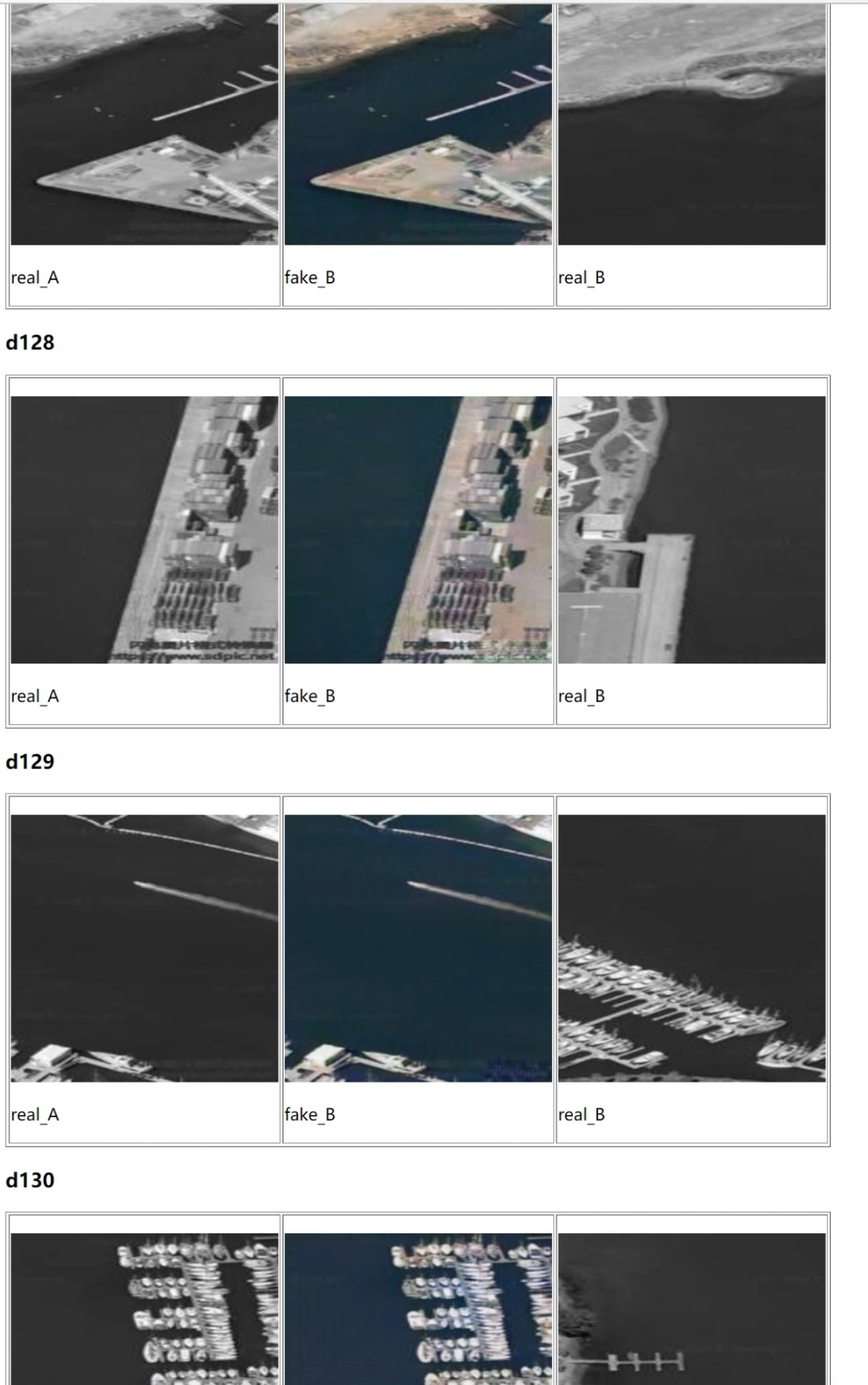
我们选择训练的方向为B到A
8.模型训练
模型训练就是完成模型定义,数据载入,可视化以及存储等工作,核心代码如下:
if __name__ == '__main__': opt = TrainOptions().parse() #获取一些训练参数 dataset = create_dataset(opt) #创建数据集 dataset_size = len(dataset) #数据集大小 print('The number of training images = %d' % dataset_size) model = create_model(opt) #创建模型 model.setup(opt) #模型初始化 visualizer = Visualizer(opt) #可视化函数 total_iters = 0 #迭代batch次数 for epoch in range(opt.epoch_count, opt.niter + opt.niter_decay + 1): epoch_iter = 0 #当前epoch迭代batch数 for i, data in enumerate(dataset): #每一个epoch内层循环 visualizer.reset() total_iters += opt.batch_size #总迭代batch数 epoch_iter += opt.batch_size model.set_input(data) #输入数据 model.optimize_parameters() #迭代更新 if total_iters % opt.display_freq == 0: #visdom可视化 save_result = total_iters % opt.update_html_freq == 0 model.compute_visuals() visualizer.display_current_results(model.get_current_visuals(), epoch, save_result) if total_iters % opt.print_freq == 0: #存储损失等信息 losses = model.get_current_losses() visualizer.print_current_losses(epoch, epoch_iter, losses, t_comp, t_data) if opt.display_id > 0: visualizer.plot_current_losses(epoch, float(epoch_iter) / dataset_size, losses) if total_iters % opt.save_latest_freq == 0: #存储模型 print('saving the latest model (epoch %d, total_iters %d)' % (epoch, total_iters)) save_suffix = 'iter_%d' % total_iters if opt.save_by_iter else 'latest' model.save_networks(save_suffix) if epoch % opt.save_epoch_freq == 0: #每隔opt.save_epoch_freq各epoch存储模型 model.save_networks('latest') model.save_networks(epoch) model.update_learning_rate()#每一个epoch后更新学习率 其中的一些重要训练参数配置如下: input_nc=1,表示生成器输入为1通道图像,即L通道。 output_nc=2,表示生成器输出为2通道图像,即AB通道。 ngf=64,表示生成器最后1个卷积层输出通道为64。 ndf=64,表示判别器最后1个卷积层输出通道为64。 n_layers_D=3,表示使用默认的PatchGAN,它相当于对70×70大小的图像块进行判别。 norm=batch,batch_size=1,表示使用批次标准化。 load_size=286,表示载入的图像尺寸。 crop_size=256,表示图像裁剪即训练尺寸。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
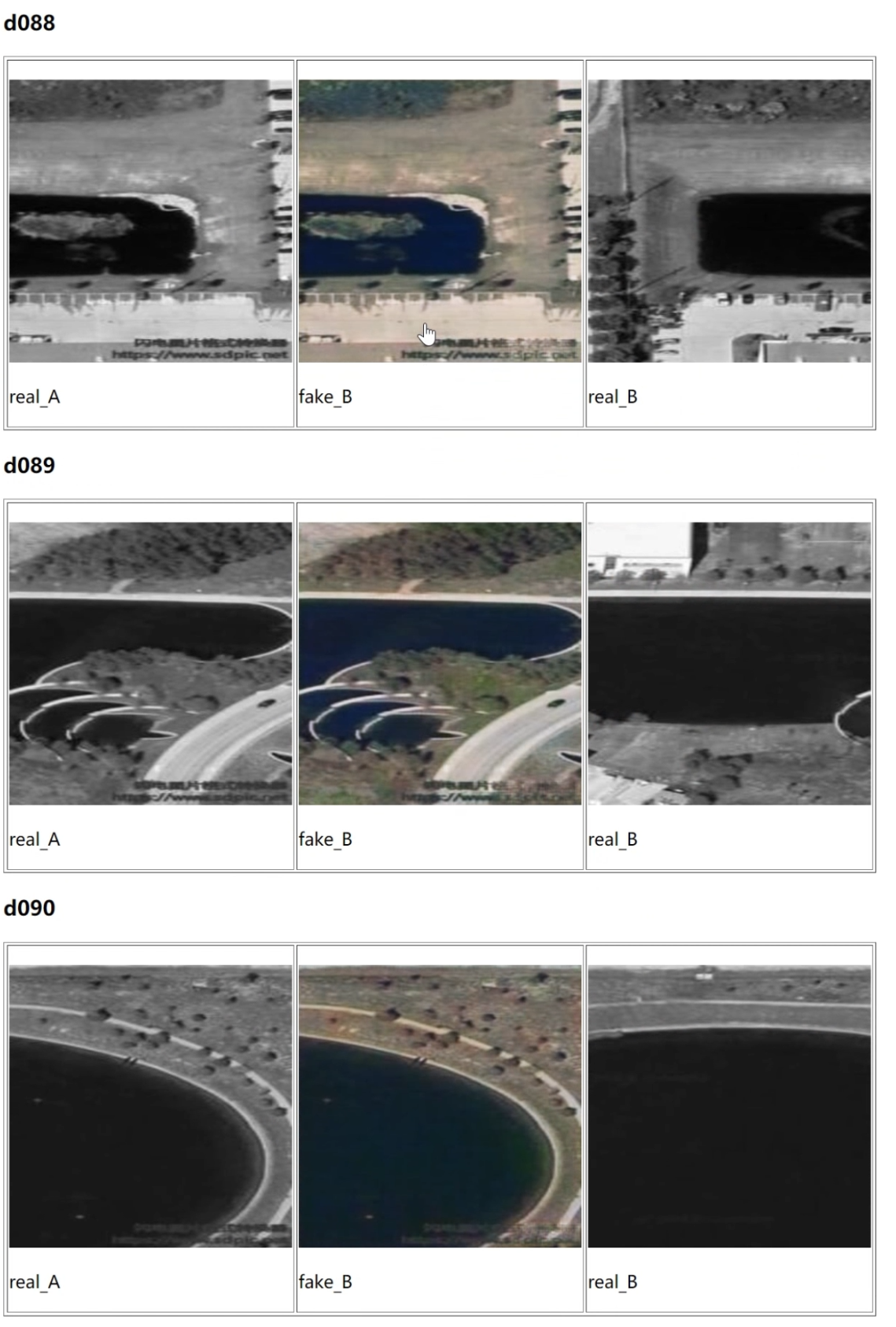
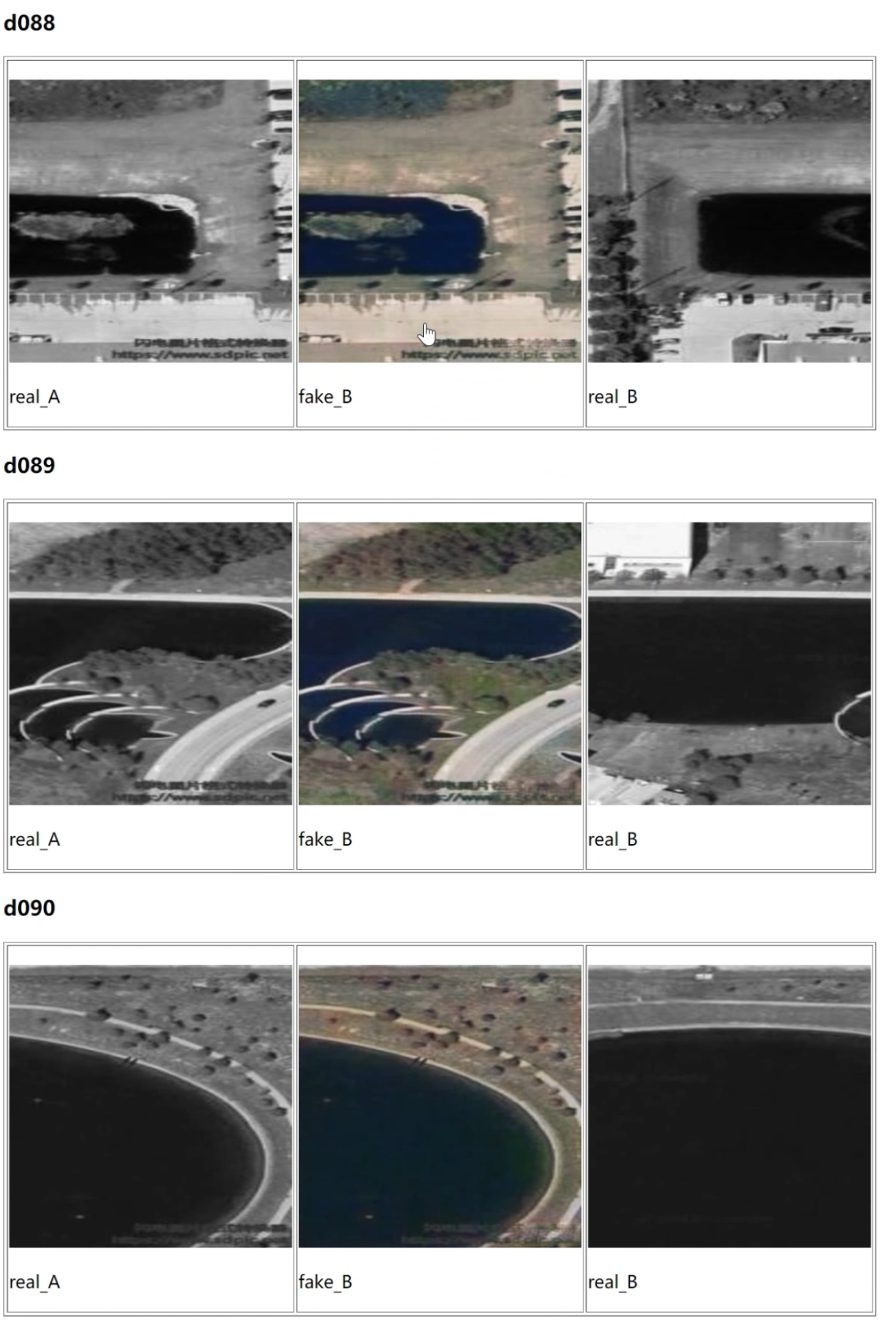
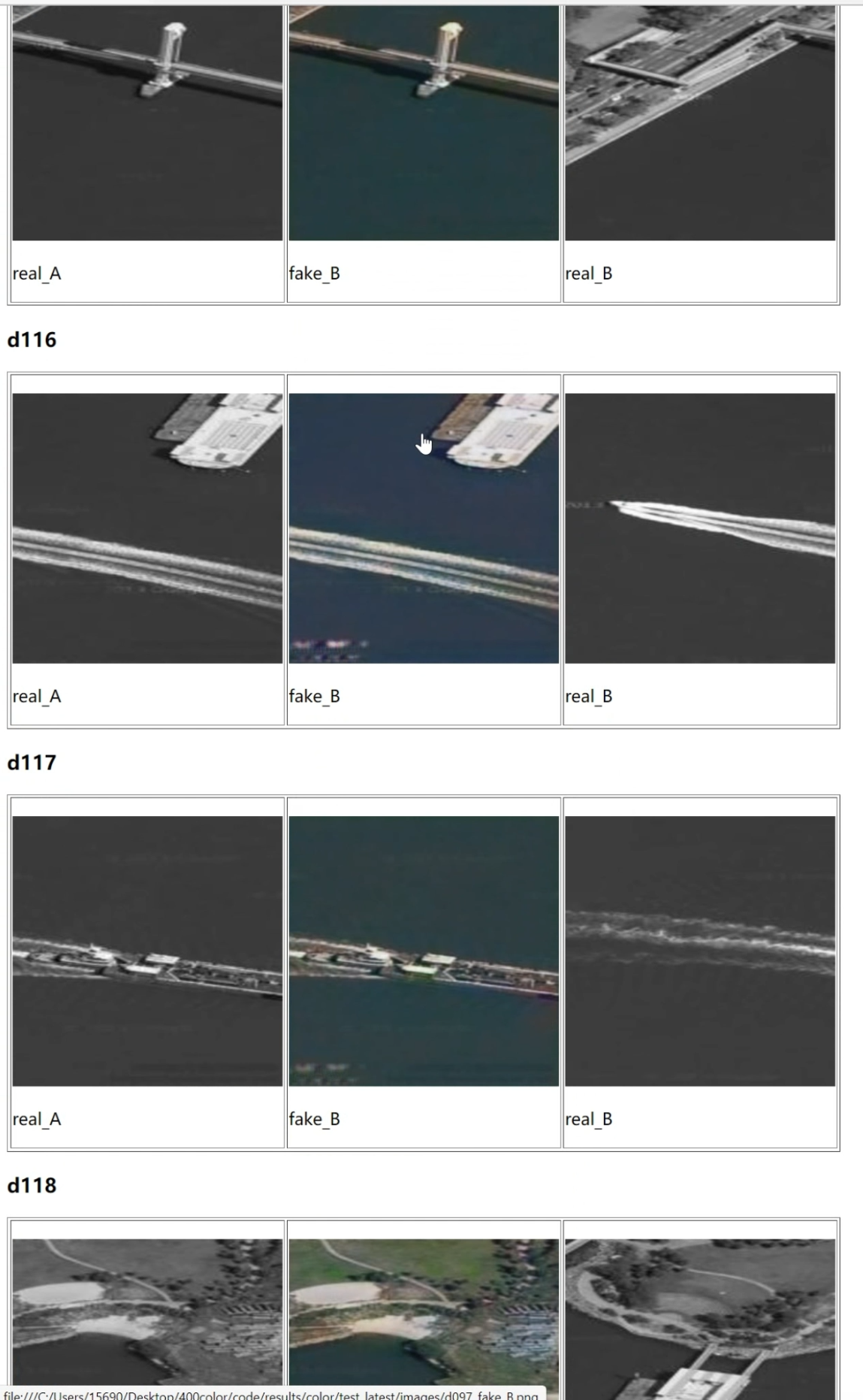
9.效果展示
10.项目视频展示
Python基于CycleGAN&pix2pix的黑白图像AI上色(源码&部署教程)
11.系统整合

参考博客《Python基于CycleGAN&pix2pix的黑白图像AI上色(源码&部署教程)》
12.参考文献
- [1]T-Reader:一种基于自注意力机制的多任务深度阅读理解模型[J]. 郑玉昆,李丹,范臻,刘奕群,张敏,马少平. 中文信息学报. 2018(11)
- [2]应用残差生成对抗网络的路况视频帧预测模型[J]. 袁帅,秦贵和,晏婕. 西安交通大学学报. 2018(10)
- [3]基于条件深度卷积生成对抗网络的图像识别方法[J]. 唐贤伦,杜一铭,刘雨微,李佳歆,马艺玮. 自动化学报. 2018(05)
- [4]基于半监督学习生成对抗网络的人脸还原算法研究[J]. 曹志义,牛少彰,张继威. 电子与信息学报. 2018(02)
- [5]改进卷积神经网络在分类与推荐中的实例应用[J]. 杨天祺,黄双喜. 计算机应用研究. 2018(04)
- [6]真实图像转换的水墨图像绘制模拟[J]. 陈添丁,金炜炜,陈英旦,吴涤. 中国图象图形学报. 2014(06)
- [7]保色调的黑白卡通图像着色方法[J]. 朱薇,刘利刚. 计算机辅助设计与图形学学报. 2011(03)
- [8]基于视觉重要性的图像油画风格化绘制算法[J]. 卢少平,张松海. 计算机辅助设计与图形学学报. 2010(07)
- [9]一种基于局部方差和结构相似度的图像质量评价方法[J]. 王宇庆,刘维亚,王勇. 光电子.激光. 2008(11)
- [10]基于色差的均方误差与峰值信噪比评价彩色图像质量研究[J]. 黄小乔,石俊生,杨健,姚军财. 光子学报. 2007(S1)


