
热门标签
热门文章
- 1标准DH建模与改进DH建模(三)—— 怎么用改进DH法_工业机器人dh和改进dh
- 2带T带Z的时间字符串使用LocalDateTime类转换成时间/时间戳类型_时间戳 t z
- 3命令行实现FFMpeg拉流推流方法思路_ffmpeg 推流 命令行
- 4数据安全被篡改的风险分析解决方案_信息安全 数据窜改风险监测
- 5解决 macOS 系统向日葵远程控制鼠标、键盘无法点击的问题_macos远程windows桌面键盘锁了
- 6完美收官!字节4面斩下2-2Offer,入职就是30K16薪,全凭这套“面试+架构进阶知识点
- 7python lxml用法
- 8[Linux防火墙]一文学会防火墙概念及常用命令_linux防火墙怎么设置默认区域
- 9Linux环境(Ubuntu)上搭建MQTT服务器(EMQX )_ubuntu怎么开放emqx相关端口
- 10【MATLAB源码-第139期】基于matlab的OFDM信号识别与相关参数的估计,高阶累量/小波算法调制识别,循环谱估计,带宽估计,载波数目估计等等。_ofdm循环谱
当前位置: article > 正文
解决Attempt to unlock mutex that was not locked
作者:Monodyee | 2024-05-20 21:21:17
赞
踩
attempt to unlock mutex that was not locked
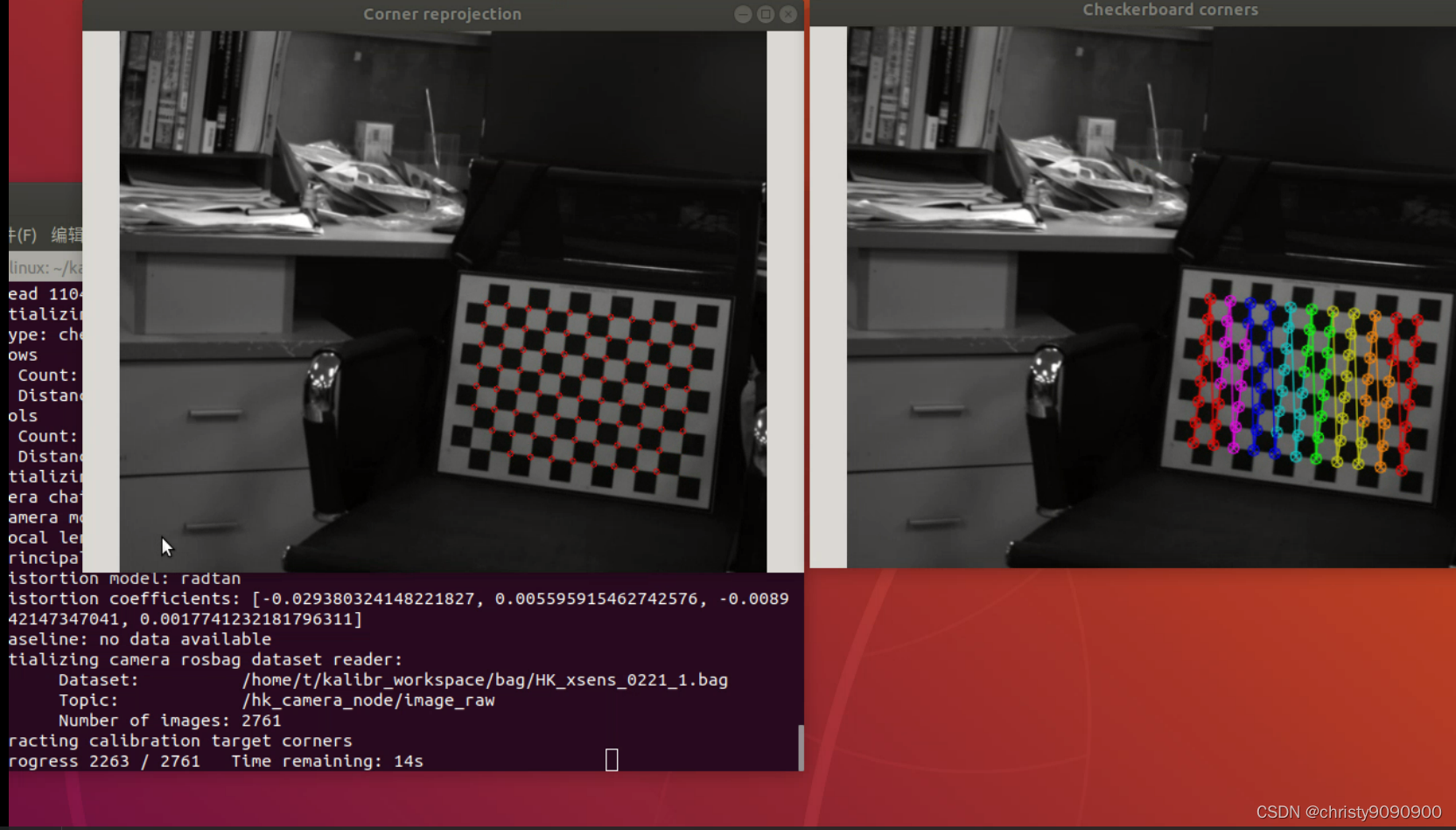
在ubuntu18.04中,使用kalibr标定相机imu外参,想查看是否提取到角点,于是加入
–show-extraction,最后命令如下。
rosrun kalibr kalibr_calibrate_imu_camera --target /home/t/kalibr_workspace/checkboard.yaml --cam /home/t/kalibr_workspace/HK_0220_1-xia.yaml --imu /home/t/kalibr_workspace/xsens.yaml --bag /home/t/kalibr_workspace/bag/HK_xsens_0221_2.bag --show-extraction
- 1
运行后报错:
Extracting calibration target corners
(Checkerboard corners:19089): GLib-GObject-CRITICAL **: 14:17:09.607: g_object_unref: assertion 'G_IS_OBJECT (object)' failed
(Checkerboard corners:19089): GLib-GObject-CRITICAL **: 14:17:09.612: g_object_unref: assertion 'G_IS_OBJECT (object)' failed
(Checkerboard corners:19089): GLib-GObject-CRITICAL **: 14:17:09.612: g_object_unref: assertion 'G_IS_OBJECT (object)' failed
Attempt to unlock mutex that was not locked
已放弃 (核心已转储)
- 1
- 2
- 3
- 4
- 5
- 6
百度后发现是因为ubuntu自带的opencv与我安装的opencv3.2.0有冲突
于是将kalibr中的以下三个含有 cv::startWindowThread()的cpp的cv::startWindowThread()注释掉
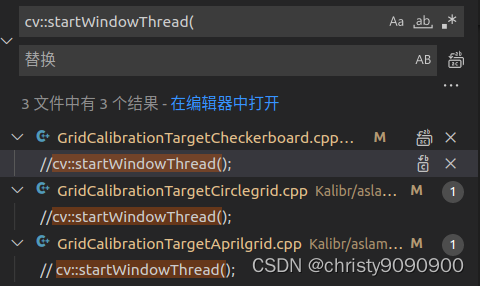
在对kalibr编译一下,重新运行命令,## 标题完美解决。
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

