
热门标签
热门文章
- 1postman导入请求到jmeter进行简单压测,开发同学一学就会_postman能调通jmeter
- 2docker export、import、save、load 区别_docker load -i指定镜像名
- 3今日arXiv最热NLP大模型论文:微软重磅:AgentAI,下一代人工智能的关键_csdn。人工智能论文
- 4Stable Diffusion教程|Controlnet插件详解和实战_sd插件 controlnet
- 5Data truncation: Incorrect datetime value: '' for column 'start' at row 1的解决方法_data truncation: incorrect datetime value: 'system
- 6【Python进阶】主流电商平台数据分析||数据采集返回商品详情主题链接主图SKU数据
- 7python美化图形化界面设计,pythontkinter界面美化_python界面设计
- 8oracle数据每小时同步一次
- 9ChatGPT最强?文心一言与ChatGPT对比_文心一言会员比gpt-3.5 前端代码解答强吗
- 10190.【华为OD机试】员工派遣(二分查找—Java&Python&C++&JS实现)_c++ 员工派遣 二分法
当前位置: article > 正文
ROS实现无人驾驶控制算法(一)——pure pursuit_纯追踪ros代码
作者:Monodyee | 2024-05-24 18:39:57
赞
踩
纯追踪ros代码
引言
对于导航系统来说,在规划好全局路径后,使机器人根据路径行驶这部分被称为轨迹跟踪。轨迹跟踪主要分为两类:基于几何追踪的方法和基于模型预测的方法。而pure pursuit算法就是最基本的基于几何的控制算法,因其鲁棒性高,对路径的要求低而广泛使用,也为后续的standly、LQR、MPC算法打好基础。
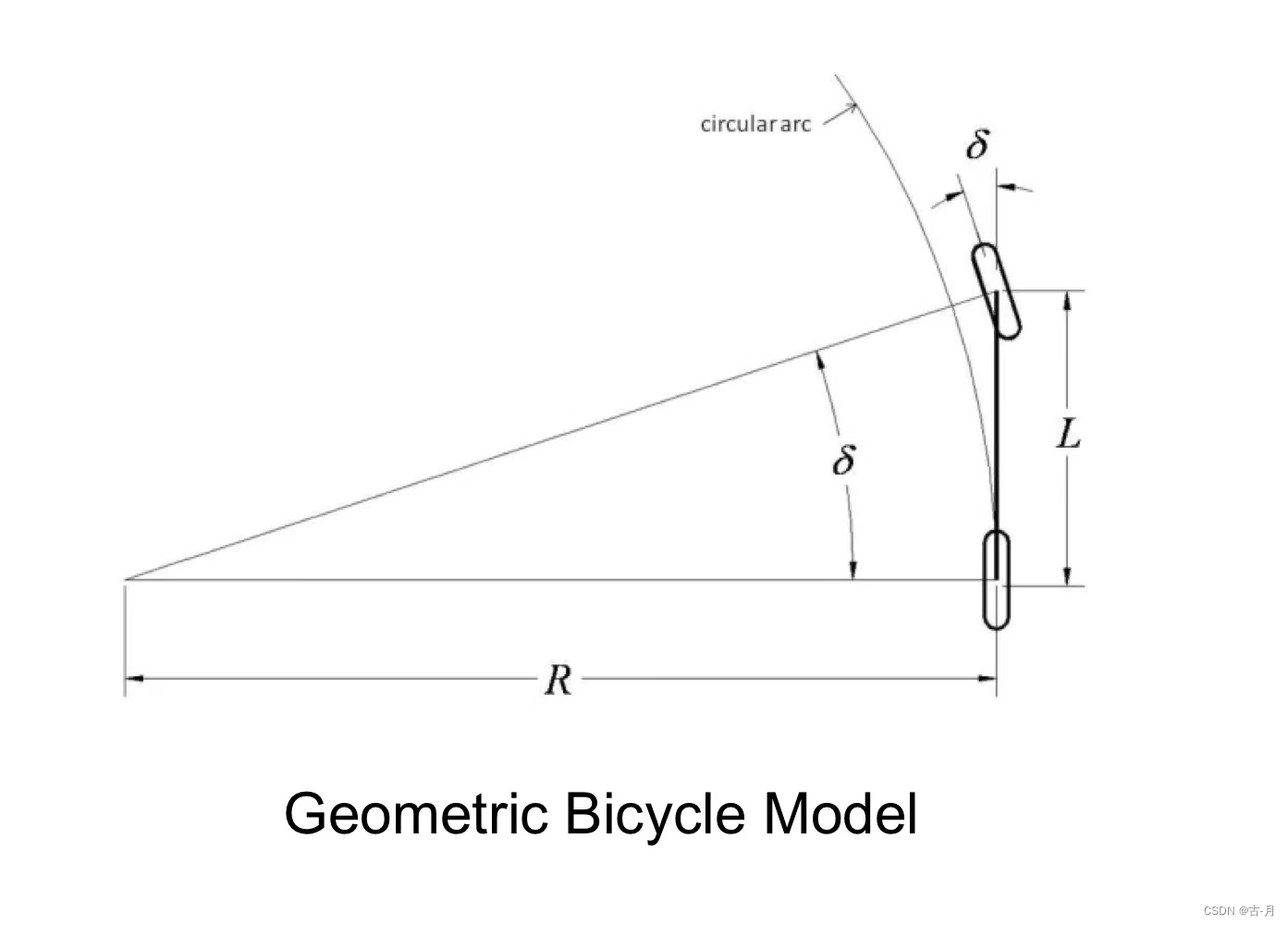
车辆运动学模型
因为纯追踪算法是基于几何模型的,因此,需要推导出车辆的运动学模型,本文采用的是阿克曼模型(差速模型也会提及)。将四轮模型转换为自行车模型方便后续计算。
对于阿克曼转向模型来说,只需要驱动电机控制线速度,以及前轮舵机转角控制转向,因此,需要计算前轮转向角的求导公式。

纯追踪算法
从自行车模型出发,纯跟踪算法以车后轴为原点, 车辆与路径最近的点为起点,在路径中寻找一个大于前视距离的点作为目标点,通过控制前轮转角,使车辆可以沿着一条经过目标路点的圆弧行驶,如下图所示:


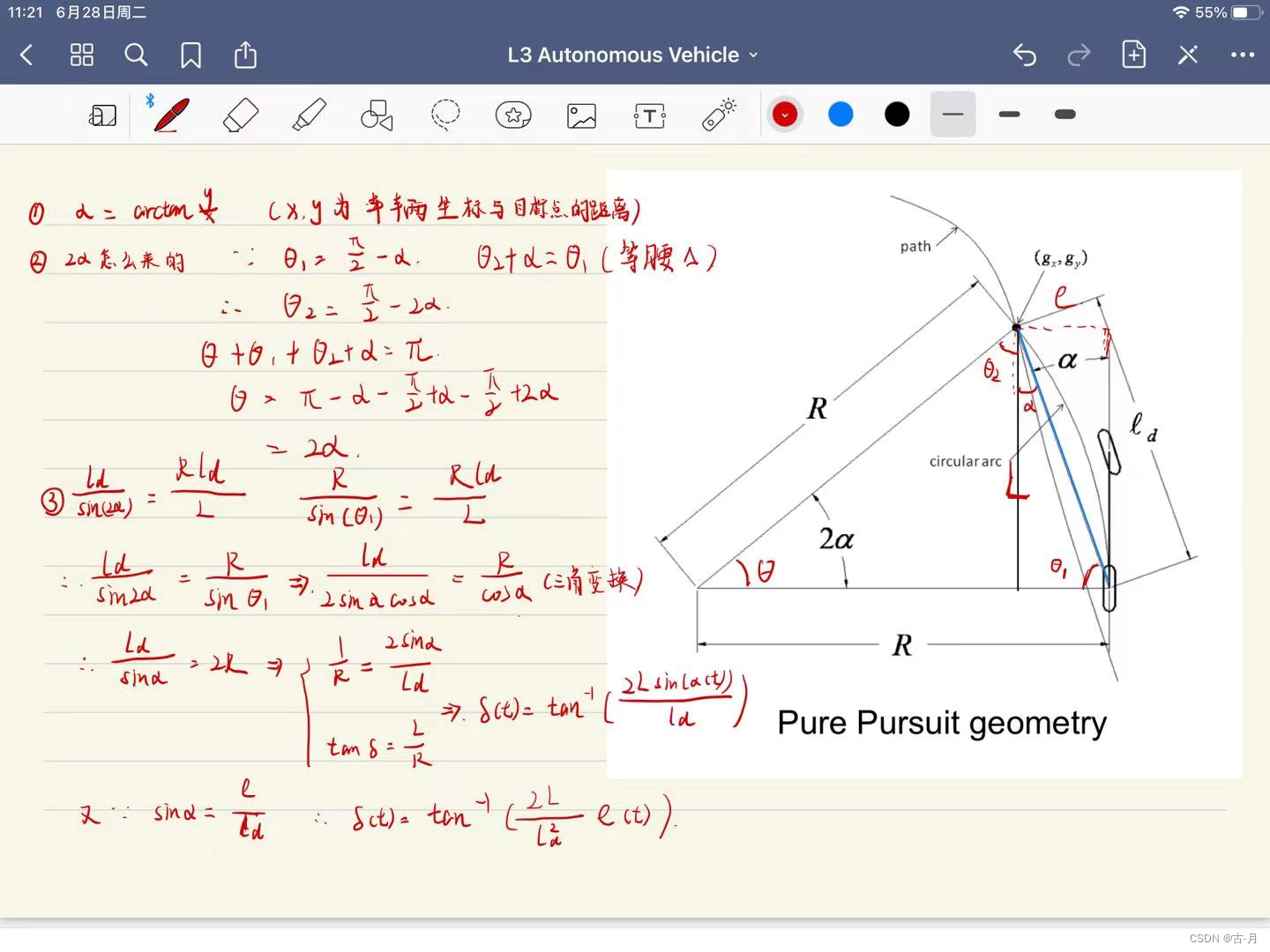
从上图推导可知,车辆的转角和轴距、前视距离、以及横向误差有关。其中最重要的是前视距离的选取。
ROS中的实现步骤
1.获取小车的当前坐标(订阅odom获取或者map到base_link坐标变换获取)
- /*! * * @param odomMsg odom传感器数据 * @author 测试 * @author odom数据会出现漂移导致不准,可尝试使用tf变换 计算出base_link在map下的坐标 */
- void PurePursuit::odomCallback(const nav_msgs::Odometry::ConstPtr &odomMsg) {
- this->odom_ = *odomMsg;
- if(this->goal_received_)
- {
- double car2goal_x = this->goal_pos_.x - odomMsg->pose.pose.position.x;
- double car2goal_y = this->goal_pos_.y - odomMsg->pose.pose.position.y;
- double dist2goal = sqrt(car2goal_x*car2goal_x + car2goal_y*car2goal_y);
- /// 当小车位置距离终点小于阈值时,说明到达目的地了
- ///和move_base一起使用时这段注释解除
- // if(dist2goal < this->goal_radius)
- // {
- // this->goal_reached_ = true;
- // this->goal_received_ = false;
- // ROS_INFO("Goal Reached !");
- // }
- }
- }

2.寻找与小车最近的路径点
- /*! * * @param wayPt 路径点 * @param carPose 机器人位姿 * @return 判断路径点是否在机器人的前方 */
- int PurePursuit::minIndex(const geometry_msgs::Point& carPose){
- int index_min = 0;
- // 先将d_min设置为最大
- int d_min = INT16_MAX;
- for(int i =0; i< map_path_.poses.size(); i++)
- {
- // 读取路径点坐标
- geometry_msgs::PoseStamped map_path_pose = map_path_.poses[i];
- // 计算路径点到小车的距离,取最小的距离
- double d_temp = PointDistanceSquare(map_path_pose,carPose);
- if (d_temp < d_min) {
- d_min = d_temp;
- index_min = i;
- }
- }
- return index_min;
- }
3.从该路径点出发,沿着路径寻找大于前视距离的第一个点作为目标点
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Monodyee/article/detail/618660
推荐阅读

相关标签

