
- 1IoT DC3 是一个基于 Spring Cloud 的开源的、分布式的物联网(IoT)平台本地部署步骤_iot-dc3_iot-dc3怎么用
- 2数据结构与算法二叉树的三种递归遍历算法 前序遍历 中序遍历 后序遍历_先序中序后序遍历二叉树的递归算法
- 3用Ai编写一个电机驱动程序
- 4NoRepeatNGramLogitsProcessor的_calc_banned_ngram_tokens
- 5哪些集合类是线程安全的?_线程安全的集合有哪些
- 6ubuntu切换国内(清华)镜像源,彻底改善apt安装下载速度_ubuntu 下载android清华源慢
- 7Springcloud----Seata分布式事务_seata插件
- 8数据结构——链表(三)_链表的指针是如何后移的
- 9理想动“裁员刀” | 百能云芯
- 109种单片机常用的软件架构_单片机框架
面向自动驾驶领域的BEV与Occupancy网络的全景解析与实战
赞
踩
2022 CVPR上,特斯拉宣布将在其自动驾驶车辆中发布一种全新的算法,这个算法被命名为Occupancy Networks,之前以object为中心的技术在目标的形状或外观不明确的开放世界交通场景中可能会失败。

这些障碍物也称为长尾障碍物,包括可变形的障碍物,如两节拖车;异形障碍物,如翻车的车辆;未知类别的障碍物,如道路上的碎石、垃圾;部分遮蔽的物体等。因此,迫切需要对这些长尾问题进行更稳健的表示,网格中心感知被认为是一个很有前途的解决方案,因为它能够在不知道物体的情况下提供3D周围空间中任何位置的占用和运动。
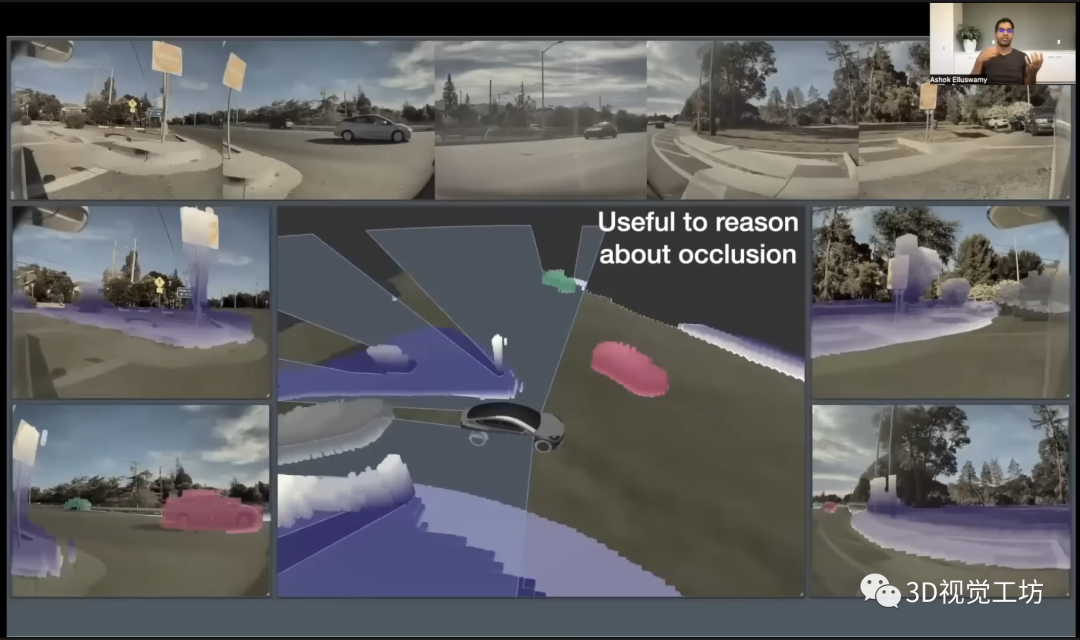

任务的提出是认为此前的3D目标检测所检测出的3D目标框,不足以描述一般物体(数据集中没有的物体),在此任务中,则把物体切分成体素进行表达,要求网络可以在3D体素空间中,预测每个体素的类别,可以认为是语义分割在3D体素空间的扩展任务。

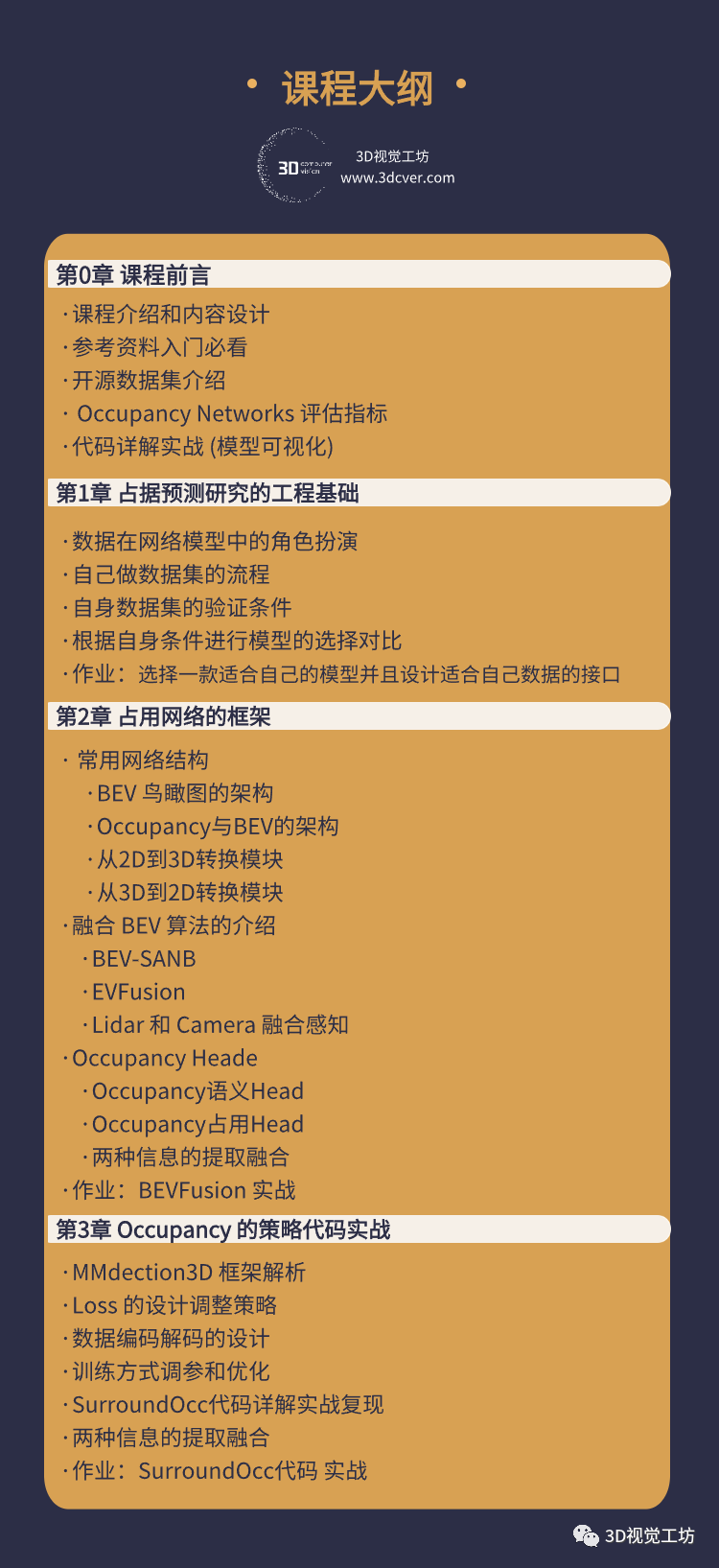
3D视觉工坊联合主讲老师推出了《面向自动驾驶领域的BEV与Occupancy网络的全景解析与实战》课程。本门课程面向实战,带你从零实现一套occ占据预测系统。几乎每一个章节都配备有相应的讲义、代码,帮助大家更好地理解occ占据预测的技术。

课程亮点
相较其他occ的系列课程,该课程更加偏向于项目实战和落地方案的制订,从多传感器融合到C++采集录制数据,分析数据,整理数据集,再到BEV和OCC的模型训练生成,结合现实环境不仅仅能做会Occupancy的项目,nerf在occ中的运用,还知道数据的由来、融合、数据的生成标定、优化模型、Occupancy后续的发展。

课程的目的在于帮助大家更快地入门Occupancy技术,从而更早地独立阅读相关论文寻找适合自己的项目落地,提升自己的竞争力。笔者认为,只有真正适合落地的算法,才是好算法。





开课时间
2024年1月20日晚上8点(周六),每周更新一节。
课程答疑
本课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。


备注:以上图片和视频部分来自网络,如果侵犯了您的权益,还请联系删除!

