
热门标签
热门文章
- 1C# Microsoft.Office.Interop.Excel.ApplicationClass 加载类型库/DLL 时出错
- 2S32DS中链接文件及启动代码学习_boot_header
- 3vue3中vue-pdf-embed实现放大、缩小、上一页、下一页、滚动翻页功能(pdf文件预览)
- 4DolphinScheduler使用Datax同步Hive结果到MYSQL_dolphinscheduler datax
- 5httpd apache
- 6进阶必备,1.8w字深度解析文件上传全过程_new blob type图片参数
- 7C# 中 SQLite 查询数据库表中字段(列)是否存在的方法_c# sqlite查询数据
- 8signature=22aedfb7326662a24345e4be344c3e01,ElectronPageTentacle
- 9js bese64转化为blob使用FormData上传
- 10富文本编辑器防xss攻击_富文本编辑器xss漏洞
当前位置: article > 正文
halcon定位_HALCON高级篇:立体视觉
作者:weixin_40725706 | 2024-02-18 16:35:28
赞
踩
halcon 双目识别顶层箱子的位置
立体视觉
立体视觉的基本原理是对象点的3D坐标是由两个或者多个从不同角度同时获取的图像决定的,HALCON提供了两种立体视觉方法:双目立体视觉和多视角立体视觉。
双目立体视觉用两个相机,返回差异图,距离图,或者3D坐标。下图展示了一个板子的立体图像对和板子部件的结果高度图。
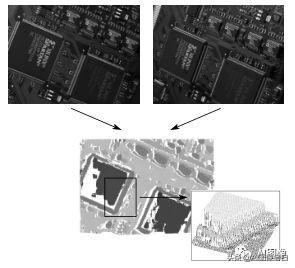
双目立体视觉的基本原理,顶部:立体图像对;底部:高度图
多视角立体视觉也可以用超过两个相机,其要么被用来重构作为3D物体模型被返回的表面,或者去重构单独的点。例如,下图展示了多视角立体相机系统的图像被用来重构导管接头的表面和结果的3D物体模型。
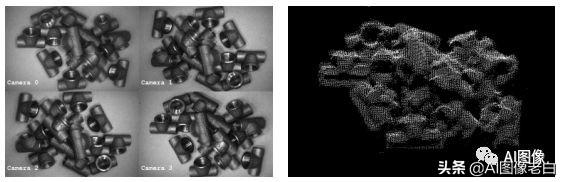
左:多视角立体相机系统图像;右:导管接头被重构表面
立体视觉的优势是任意形状物体表面的3D信息可以用图像来决定。立体视觉可以和其他视觉方法相结合,例如将blob分析作为处理步骤,其能够从深度图像中提取特定物体或者物体组件,或者用于基于表面的3D匹配,其能够在重构的3D模型表面中定位物体。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/109158
推荐阅读
相关标签

