
热门标签
热门文章
- 1两年经验的java程序员可以看哪些实用进阶的书籍?_适合两年java经验看的电子书
- 2Surv单因素批量生存分析使用 cox批量生存回归分析有点像deseq2的design差异分析designG:\r\2021_1203_geo\GEO-master\GSE11121_survival_survival包做cox单因素分析用多个样本
- 3Unable to start web server; nested exception is org.springframework.context.ApplicationContextExcept_unable to start web server; nested exception is or
- 4Linux常见面试题-ps查看进程命令_ps -ef| grep java
- 5基于微信小程序高校校园教室预约系统设计与实现 毕业设计论文大纲参考(JSP后台)
- 6Stable Diffusion系列课程上:安装、提示词入门、常用模型(checkpoint、embedding、LORA)、放大算法、局部重绘、常用插件_stable diffusion checkpoint
- 7大师学SwiftUI第6章 - 声明式用户界面 Part 4
- 8html的无语义标签:div & span
- 9【yolov8部署实战】VS2019+OpenCV环境部署yolov8目标检测模型|含详细注释源码
- 10python绘制实时波形图_使用python进行波形及频谱绘制的方法
当前位置: article > 正文
CFAR(恒虚警率)目标检测算法_cfar检测
作者:weixin_40725706 | 2024-02-20 03:15:03
赞
踩
cfar检测
CFAR算法介绍
毫米波雷达中,CFAR(Constant False Alarm Rate)算法是一种常用的目标检测和跟踪算法。它的主要作用是在背景噪声中检测出目标信号,同时保证误检概率不变。
CFAR算法的基本思想是,对于每个雷达测量的数据点,以该点为中心,建立一个检测窗口,在该窗口内计算信号功率的平均值和方差,并将该窗口划分为若干个子窗口。然后,根据期望的误检概率和背景噪声的统计特性,计算出每个子窗口的阈值,用于判断该窗口内是否存在目标信号。
CFAR算法可以根据不同的背景噪声模型进行优化,例如高斯白噪声。广泛应用于雷达信号处理、无线通信等领域。
CFAR算法步骤
CFAR算法的步骤如下:
- 确定检测窗口的大小和形状,例如矩形、圆形等。
- 在检测窗口内计算信号功率的平均值和方差,可以使用不同的方法来计算,例如对数变换、线性平均、动态平均等。
- 将检测窗口划分为若干个子窗口,每个子窗口的大小和形状可以根据实际应用进行调整。
- 根据期望的误检概率和背景噪声的统计特性,计算每个子窗口的阈值,例如高斯分布下的阈值可以通过计算高斯分布的概率密度函数得到。
- 对于每个子窗口,比较信号功率与阈值的大小关系,判断该子窗口内是否存在目标信号。
- 对于检测到的目标信号,可以进行后续的处理和跟踪,例如目标分离、速度估计等。
:::
CFAR算法分为两类:一类是均值类CFAR(CA-CFAR)算法,该类算法应用的前提是假设背景杂波是均匀分布的;另一类是有序统计类CFAR(OS-CFAR)算法,这类算法是为了应对邻域内多目标情况而设计的。
均值类CFAR
通过对待检测单元周围的参考单元采样值进行处理来获得背景的功率水平估计,进而根据估计的背景功率水平计算出待检测单元的检测门限。 均值类(Mean Level, ML) CFAR 核心的思想是将参考窗均值的处理结果作为背景功率水平估计,与门限乘积因子相乘得到检测门限,经过比较得到有无目标的判决。
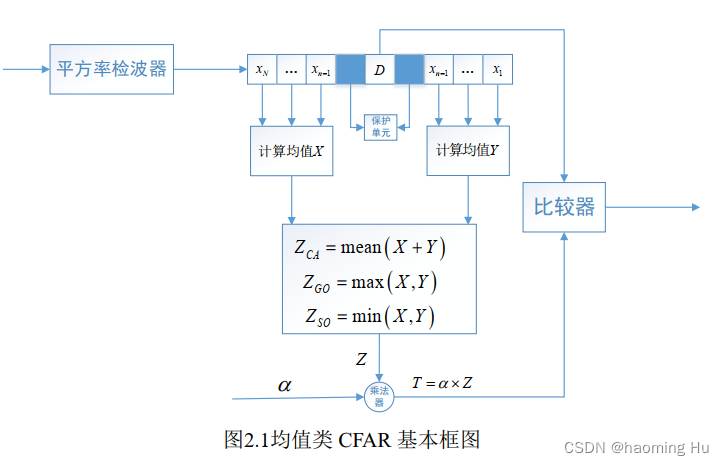
- 保护单元:保护单元是指在检测目标信号时,需要保护不被噪声干扰的区域。保护单元通常被定义为一个窗口,窗口的中心为当前正在检测的目标信号。 (保护单元可以理解为:对于一个目标而言,通常是许多采样点组成的,被检查的采样点附近的一些采样点信号强度可能比背景噪声高很多,本质上这些是属于目标信号的领域,所以需要隔离起来)?
- 参考单元:参考单元的作用是用于计算背景噪声的统计信息,通常使用参考单元中的噪声水平来作为阈值,以便将噪声和目标信号区分开来。(用于计算平均值的部分)
单元平均(Cell Averaging CFAR, CA-CFAR)


单元平均选大(Greagest of CFAR, GO-CFAR)

单元平均选小(Smallest of CFAR, SO-CFAR)

参考文献:复杂背景下的自适应恒虚警算法研究
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/118137
推荐阅读
相关标签

