
- 1仿百度文库方案[openoffice.org 3+swftools+flexpaper](七) 之 使用iText将jpg、jpeg、png转换为pdf...
- 2第八讲_ArkTS装饰器(五)_arkts 装饰器
- 3深度学习新星:GAN的基本原理、应用和走向_fsrcnn和gan
- 4docker小白采坑---启动失败---空间不足
- 5【使用 BERT 的问答系统】第 5 章 :BERT模型应用:问答系统_faq问答系统bert模型
- 6区块链达摩院落地 国研政情·经信研究:夜总会走出来阿里先锋
- 7【STM32学习笔记】(5)—— STM32工程添加源文件和头文件_stm32怎么添加头文件
- 8高效实用|ChatGPT指令/提示词/prompt/AI指令大全,基础版_让chatgpt修改文章的prompt
- 9MATLAB 自定义均值滤波 (53)
- 10西南科技大学数字电子技术实验二(SSI逻辑器件设计组合逻辑电路及FPGA实现 )FPGA部分_ssi组合逻辑电路实验
(25)(25.4) PX4FLOW光学流量相机板_px4flow光流传感器
赞
踩
文章目录
前言
本文介绍如何设置可用于非 GPS 导航(Non-GPS navigation)的 PX4FLOW(光学流量)传感器。
!Warning
Plane 或 Rover 尚不支持 PX4FLOW。
25.4.1 概述
PX4FLOW (光流)传感器是一个专用的高分辨率向下指向相机模块和一个三轴陀螺仪,可利用地面纹理和可见特征来确定飞机的地面速度。虽然该传感器可提供内置的 Maxbotix LZ-EZ4 声纳来测量高度,但在测试中,该声纳在各种地面上都不够可靠,因此没有使用其读数。建议购买不带声纳的 PX4Flow 设备。相反,还应在飞行器上安装一个单独的测距仪(Range Finder),如 LightWare SF10b。
!Warning
要使用这种流量传感器,你需要单独购买一个测距仪,如 LightWare SF10b。
25.4.2 在哪里购买
该传感器可从众多零售商处购买,其中包括
25.4.3 安装驱动程序(仅限 Windows)
在 Windows 机器上,"PX4Flow"设备应出现在任务计划器(和 Windows 设备管理器)的连接下拉菜单中,或由 QGroundControl 自动识别。如果没有,你可能需要下载、解压缩并手动安装 px4flow Windows 驱动程序(px4flow windows driver),这可能需要允许安装未签名的驱动程序。
25.4.4 使用MissionPlanner
1. 下载并解压 PX4Flow-KLT 固件(PX4Flow-KLT firmware)(source code here)。
2. 使用微型 USB 调试线将 PX4Flow 传感器连接到电脑。
3. 打开"初始设置"、"安装固件"屏幕,选择 COM 端口并单击"加载自定义固件"链接。选择在步骤 1 中下载的 px4flow-klt-06dec2014.px4 二进制文件。你可能需要拔下传感器插头并插回才能开始上传。

4. 断开并重新连接传感器/USB 调试线。
5. 选择适当的 COM 端口,然后按连接。
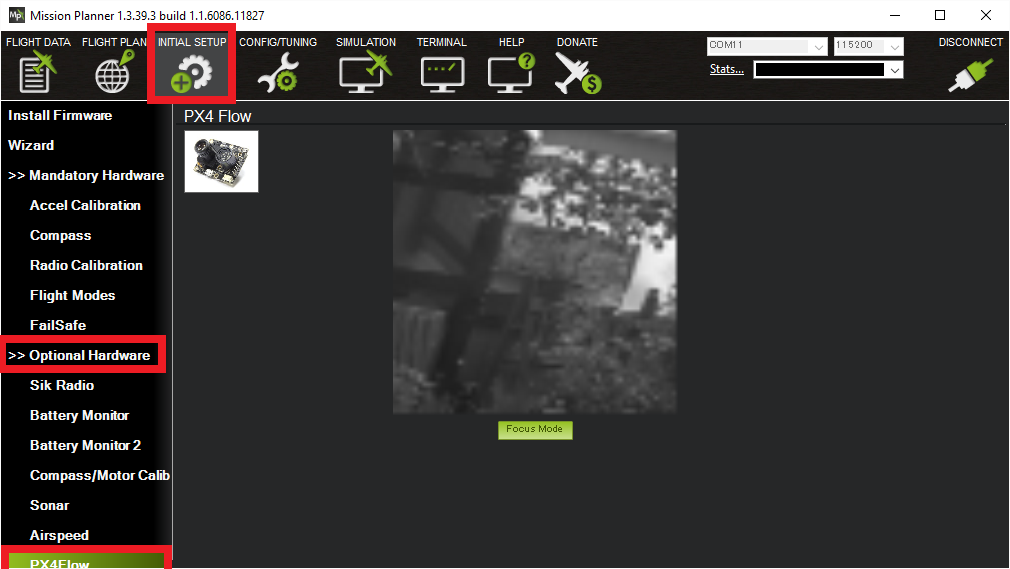
6. 打开"初始设置">"可选硬件">"PX4Flow"屏幕。
7. 取下镜头盖,将相机对准至少 3m 外的高对比度物体。取下阻止镜头转动的小螺丝,调整焦距,直到图像清晰显示为止。
25.4.5 使用QGroundControl
为了使用 QgroundControl、PX4Flow 和 ArduPilot,你需要使用 QGroundControl 加载的固件完成设置和聚焦,然后更新固件使其与 ArduPilot 兼容。
1. 选择"飞行器设置"页面,然后单击"固件"选项卡。
2. 使用微型 USB 调试线将 PX4Flow 传感器连接到电脑。
3. 在右侧窗格中选中"标准版本(stable)"。点击"OK"。QGroundControl 将闪存一个可用于镜头对焦的固件。
4. 拔下并重新插入传感器。应该会出现两个额外的选项卡: "PX4Flow"和"参数"。
5. 单击"PX4Flow",取下镜头盖,将相机对准至少 3m 外的高对比度物体。取下阻止镜头转动的小螺丝,调整焦距直到图像清晰显示。这将使设备对焦至无限远。重新装上螺丝。
6. 下载并解压 PX4Flow-KLT 固件(PX4Flow-KLT firmware)(source code here)。
7. 拔下传感器,单击"固件"选项卡并重新插入传感器。
8. 在右侧点击固件版本下拉菜单,选择"自定义固件文件"。点击"确定"。然后选择上面下载的固件。QGroundControl 现在应闪存与 ArduPilot 兼容的固件。QGroundControl 现在会认为传感器是 Pixhawk。别担心。拔下插头,将其连接到自动驾驶仪。
25.4.6 与Pixhawk连接
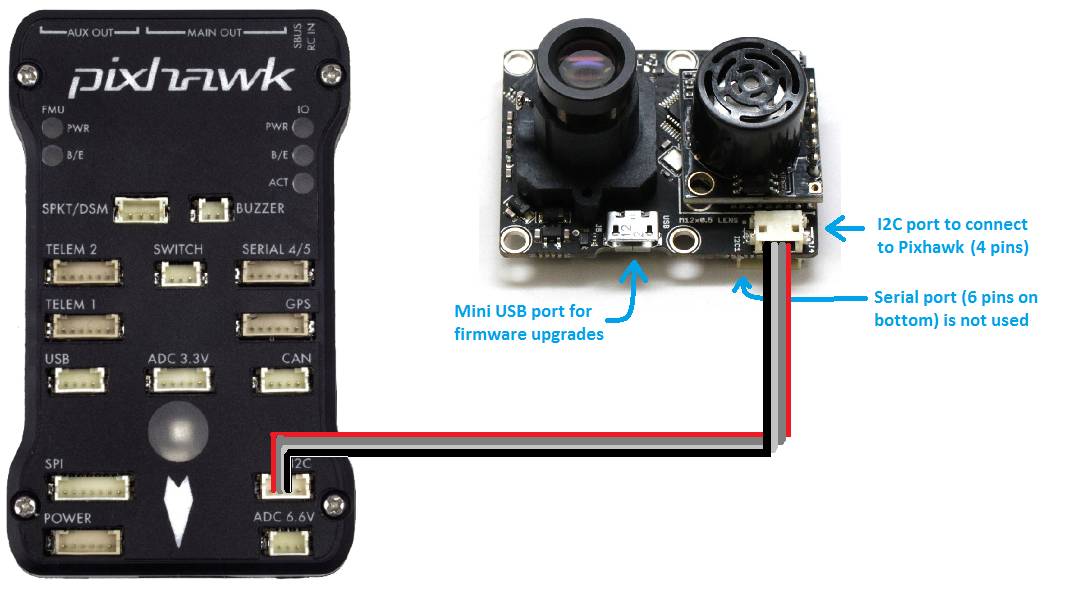
传感器应通过 4 针 I2C 端口连接到自动驾驶仪。在大多数情况下,应使用 I2C 分线器允许其他 I2C 设备(如外部 RGB LED 和 GPS/指南针模块的指南针)共享同一端口。
25.4.7 安装到机架上
流量传感器的默认安装方式是直向下,微型 USB 端口朝向飞行器前部。在传感器的背面,你应该可以看到打印的轴线,X 轴应指向前方,Y 轴应指向右方。FLOW_ORIENT_YAW 参数可用于考虑其他偏航方向。
流量传感器必须安装在不会产生角度振动的位置,以免图像模糊。
!Note
默认安装方向与 PX4FLOW wiki 上显示的不同。如果按照 PX4FLOW wiki 上的方向安装电路板,则需要将 FLOW_ORIENT_YAW 设置为 -9000。
25.4.8 启用传感器

使用 Mission Planner 连接自动驾驶仪,然后在初始设置 | 可选硬件 | 光流页面上选中启用复选框,即可启用传感器。或者通过完整参数列表将 FLOW_TYPE 参数设置为"1"。重新启动 Pixhawk 板后,传感器将被初始化。
如果报告传感器不健康,可将 BRD_BOOT_DELAY 设置为 600(0.6 秒)并重新启动自动驾驶仪。这将在自动驾驶仪通过 I2C 总线探测传感器之前为传感器的启动提供更多时间。
25.4.9 测试和设置
参见光学流量传感器测试和设置(Optical Flow Sensor Testing and Setup)。

