
四张图片道清AI大模型的发展史(1943-2023)_大模型发展历程
赞
踩
四张图片道清AI大模型的发展史(1943-2023)
现在最火的莫过于GPT了,也就是大规模语言模型(LLM)。“LLM” 是 “Large Language Model”(大语言模型)的简称,通常用来指代具有巨大规模参数和复杂架构的自然语言处理模型,例如像 GPT-3(Generative Pre-trained Transformer 3)这样的模型。这些模型在处理文本和语言任务方面表现出色,但其庞大的参数量和计算需求使得它们被称为大模型。当然也有一些自动生成图片的模型,但是影响力就不如GPT这么大了。
大模型的定义
而大模型的概念就是相对于以前小模型而言的。用这两张生成的图片就很好的说明了这一点。以前小模型是一座小岛,由一些动植物构成的一个生态系统。但是占用面积(算力)、物种(参数)、生态系统结构(模型结构)都是比较有限的。而大模型你可以看作是一个岛群,这不仅是一个个小岛的简单拼接,而是相互连接成为一个大整体,甚至大国度。

从专业的角度来说,大模型通常指的是具有大量参数和复杂结构的深度神经网络模型。随着计算能力的提升和大规模数据集的增加,研究人员开始构建拥有数以亿计甚至数千亿参数的神经网络,这些模型通常被称为大模型。与以前的小模型相比,大模型在参数数量和复杂性上都有显著的提升。
以下是大模型与以前的小模型之间的一些主要区别:
1、参数数量:大模型拥有比以前的小模型更多的参数。这意味着大模型可以更好地捕捉数据中的复杂模式和特征,从而在各种任务上取得更好的性能。
2、复杂性:大模型通常具有更深的网络结构,包括更多的隐藏层。这种深度可以帮助模型学习更高层次的抽象特征,从而提高其表示能力。
3、泛化能力:大模型在训练数据上的表现可能更好,但其泛化能力可能相对较差。大模型很容易过拟合,即在训练数据上表现出色,但在新数据上表现不佳。
4、计算资源:训练和部署大模型需要更多的计算资源,包括更多的计算时间和内存。这使得大模型在实际应用中可能更昂贵。
5、数据量:大模型通常需要更多的数据来进行训练,以防止过拟合。这可能需要更多的标注工作和数据收集。
6、领域适用性:大模型在某些特定领域可能表现出色,特别是在需要复杂特征表示的任务上,如自然语言处理和计算机视觉。然而,对于某些简单任务,大模型可能过于复杂,造成资源浪费。
7、解释性:大模型的复杂性可能导致其内部的决策过程难以解释。这在某些应用中可能会引发隐私和透明性的问题。
8、新算法和技术:大模型的发展推动了新的算法和技术的研究,包括正则化方法、优化技术和参数初始化策略,以减少过拟合和提高训练效率。
总的来说,大模型在特定任务上的表现可能非常出色,但也面临着一些挑战和限制,如计算资源需求、泛化能力等。在选择使用大模型还是小模型时,需要权衡不同因素,并根据具体问题和需求做出决策。
人工模型的发展史宏观视角
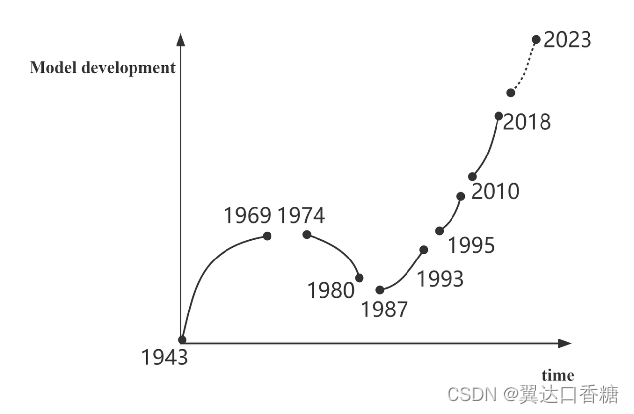
从整个模型的发展历史来看,这种技术的发展并不是一帆风顺的。在诞生后的一段时间即出现过快速发展时期,也出现‘黑暗’时期。我简单画了一个流程来帮助大家理解这个时期。整个发展时期可以被划分成为六个阶段,
1起步发展期:1943年—20世纪60年代
2反思发展期:20世纪70年代
3应用发展期:20世纪80年代
4平稳发展期:20世纪90年代—2010年
5蓬勃发展期:2011年-2018年
6LLM繁荣发展期:2018年-2023年
当然现在大家对这个历史的划分还存在一些争议,但是并不影响整个过程的理解。这种思路最核心的思路是以神经网络为基础的模型体系进行叙述的。模型的发展其实也是随着技术的不断革新而产生变化的。模型本身甚至直接和计算机的计算能力进行挂钩。从初期神经网络被提出以后,其实很多学者都对这个新的话题感兴趣。但是后来受到计算能力的限制,出现了停滞的十几年。多亏了摩尔定理的出现才使得具备较强计算能力的CPU可以被用于建立复杂的计算模型。但是那个时候还是属于机器学习初代模型阶段。一直到GPU的出现才带来了模型的蓬勃发展和LLM的出现。
人工模型的发展史微观视角
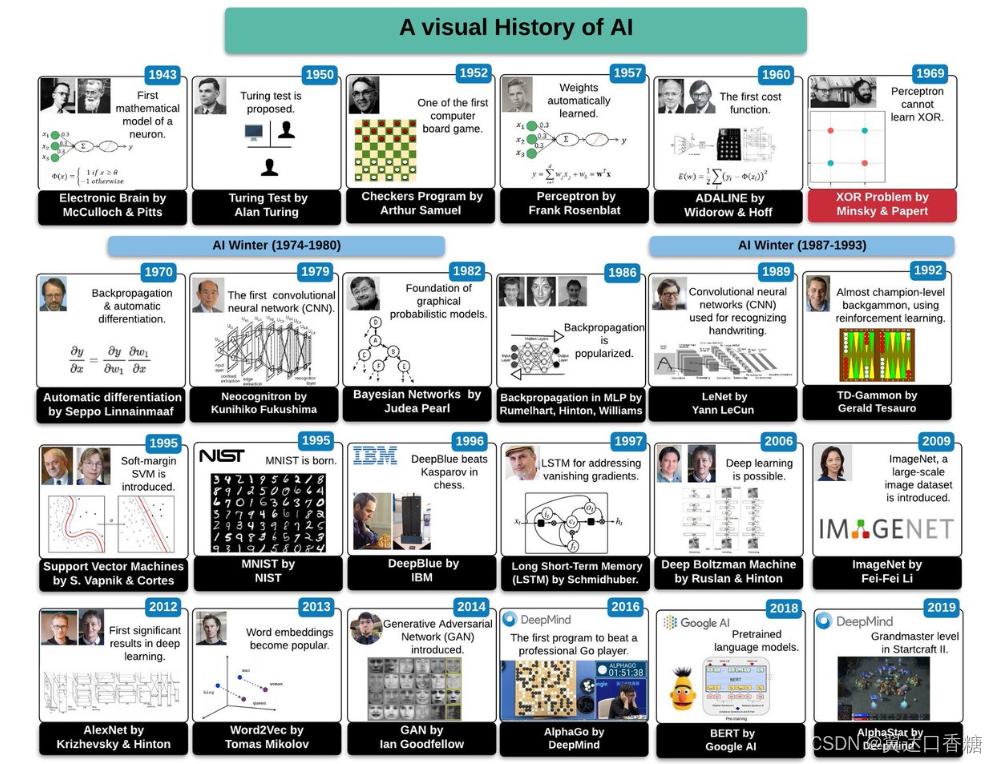
从微观视角来看,就是一个又一个的研究的成果。下图概括了历史的模型发展阶段。通过文字的形式我从头到尾列举关键的发展节点。
1 起步发展期:1943年—20世纪60年代
人工智能概念的提出后,发展出了符号主义、联结主义(神经网络),相继取得了一批令人瞩目的研究成果,如机器定理证明、跳棋程序、人机对话等,掀起人工智能发展的第一个高潮。
1943年,美国神经科学家麦卡洛克(Warren McCulloch)和逻辑学家皮茨(Water Pitts)提出神经元的数学模型,这是现代人工智能学科的奠基石之一。
1950年,艾伦·麦席森·图灵(Alan Mathison Turing)提出“图灵测试”(测试机器是否能表现出与人无法区分的智能),让机器产生智能这一想法开始进入人们的视野。
1950年,克劳德·香农(Claude Shannon)提出计算机博弈。
1956年,达特茅斯学院人工智能夏季研讨会上正式使用了人工智能(artificial intelligence,AI)这一术语。这是人类历史上第一次人工智能研讨,标志着人工智能学科的诞生。
1957年,弗兰克·罗森布拉特(Frank Rosenblatt)在一台IBM-704计算机上模拟实现了一种他发明的叫做“感知机”(Perceptron)的神经网络模型。
1958年,David Cox提出了logistic regression。
LR是类似于感知机结构的线性分类判别模型,主要不同在于神经元的激活函数f为sigmoid,模型的目标为(最大似然)极大化正确分类概率。
1959年,Arthur Samuel给机器学习了一个明确概念:Field of study that gives computers the ability to learn without being explicitly programmed.(机器学习是研究如何让计算机不需要显式的程序也可以具备学习的能力)。
1961年,Leonard Merrick Uhr 和 Charles M Vossler发表了题目为A Pattern Recognition Program That Generates, Evaluates and Adjusts its Own Operators 的模式识别论文,该文章描述了一种利用机器学习或自组织过程设计的模式识别程序的尝试。
1965年,古德(I. J. Good)发表了一篇对人工智能未来可能对人类构成威胁的文章,可以算“AI威胁论”的先驱。他认为机器的超级智能和无法避免的智能爆炸最终将超出人类可控范畴。后来著名科学家霍金、发明家马斯克等人对人工智能的恐怖预言跟古德半个世界前的警告遥相呼应。
1966 年,麻省理工学院科学家Joseph Weizenbaum 在 ACM 上发表了题为《ELIZA-a computer program for the study of natural language communication between man and machine》文章描述了ELIZA 的程序如何使人与计算机在一定程度上进行自然语言对话成为可能,ELIZA 的实现技术是通过关键词匹配规则对输入进行分解,而后根据分解规则所对应的重组规则来生成回复。
1967年,Thomas等人提出K最近邻算法(The nearest neighbor algorithm)。KNN的核心思想,即给定一个训练数据集,对新的输入实例Xu,在训练数据集中找到与该实例最邻近的K个实例,以这K个实例的最多数所属类别作为新实例Xu的类别。
1968年,爱德华·费根鲍姆(Edward Feigenbaum)提出首个专家系统DENDRAL,并对知识库给出了初步的定义,这也孕育了后来的第二次人工智能浪潮。该系统具有非常丰富的化学知识,可根据质谱数据帮助化学家推断分子结构。专家系统(Expert Systems)是AI的一个重要分支,同自然语言理解,机器人学并列为AI的三大研究方向。它的定义是使用人类专家推理的计算机模型来处理现实世界中需要专家作出解释的复杂问题,并得出与专家相同的结论,可视作“知识库(knowledge base)”和“推理机(inference machine)” 的结合。
1969年,“符号主义”代表人物马文·明斯基(Marvin Minsky)的著作《感知器》提出对XOR线性不可分的问题:单层感知器无法划分XOR原数据,解决这问题需要引入更高维非线性网络(MLP, 至少需要两层),但多层网络并无有效的训练算法。这些论点给神经网络研究以沉重的打击,神经网络的研究走向长达10年的低潮时期。
2 反思发展期:20世纪70年代
人工智能发展初期的突破性进展大大提升了人们对人工智能的期望,人们开始尝试更具挑战性的任务,然而计算力及理论等的匮乏使得不切实际目标的落空,人工智能的发展走入低谷。
1974年,哈佛大学沃伯斯(Paul Werbos)博士论文里,首次提出了通过误差的反向传播(BP)来训练人工神经网络,但在该时期未引起重视。BP算法的基本思想不是(如感知器那样)用误差本身去调整权重,而是用误差的导数(梯度)调整。通过误差的梯度做反向传播,更新模型权重, 以下降学习的误差,拟合学习目标,实现’网络的万能近似功能’的过程。
1975年,马文·明斯基(Marvin Minsky)在论文《知识表示的框架》(A Framework for Representing Knowledge)中提出用于人工智能中的知识表示学习框架理论。
1976年,兰德尔·戴维斯(Randall Davis)构建和维护的大规模的知识库,提出使用集成的面向对象模型可以提高知识库(KB)开发、维护和使用的完整性。
1976年,斯坦福大学的肖特利夫(Edward H. Shortliffe)等人完成了第一个用于血液感染病的诊断、治疗和咨询服务的医疗专家系统MYCIN。
1976年,斯坦福大学的博士勒纳特发表论文《数学中发现的人工智能方法——启发式搜索》,描述了一个名为“AM”的程序,在大量启发式规则的指导下开发新概念数学,最终重新发现了数百个常见的概念和定理。
1977年,海斯·罗思(Hayes. Roth)等人的基于逻辑的机器学习系统取得较大的进展,但只能学习单一概念,也未能投入实际应用。
1979年,汉斯·贝利纳(Hans Berliner)打造的计算机程序战胜双陆棋世界冠军成为标志性事件。(随后,基于行为的机器人学在罗德尼·布鲁克斯和萨顿等人的推动下快速发展,成为人工智能一个重要的发展分支。格瑞·特索罗等人打造的自我学习双陆棋程序又为后来的强化学习的发展奠定了基础。)
3 应用发展期:20世纪80年代
人工智能走入应用发展的新高潮。专家系统模拟人类专家的知识和经验解决特定领域的问题,实现了人工智能从理论研究走向实际应用、从一般推理策略探讨转向运用专门知识的重大突破。而机器学习(特别是神经网络)探索不同的学习策略和各种学习方法,在大量的实际应用中也开始慢慢复苏。
1980年,在美国的卡内基梅隆大学(CMU)召开了第一届机器学习国际研讨会,标志着机器学习研究已在全世界兴起。
1980年,德鲁·麦狄蒙(Drew McDermott)和乔恩·多伊尔(Jon Doyle)提出非单调逻辑,以及后期的机器人系统。
1980年,卡耐基梅隆大学为DEC公司开发了一个名为XCON的专家系统,每年为公司节省四千万美元,取得巨大成功。
1981年,保罗(R.P.Paul)出版第一本机器人学课本,“Robot Manipulator:Mathematics,Programmings and Control”,标志着机器人学科走向成熟。
1982年,马尔(David Marr)发表代表作《视觉计算理论》提出计算机视觉(Computer Vision)的概念,并构建系统的视觉理论,对认知科学(CognitiveScience)也产生了很深远的影响。
1982年,约翰·霍普菲尔德(John Hopfield) 发明了霍普菲尔德网络,这是最早的RNN的雏形。霍普菲尔德神经网络模型是一种单层反馈神经网络(神经网络结构主要可分为前馈神经网络、反馈神经网络及图网络),从输出到输入有反馈连接。它的出现振奋了神经网络领域,在人工智能之机器学习、联想记忆、模式识别、优化计算、VLSI和光学设备的并行实现等方面有着广泛应用。
1983年,Terrence Sejnowski, Hinton等人发明了玻尔兹曼机(Boltzmann Machines),也称为随机霍普菲尔德网络,它本质是一种无监督模型,用于对输入数据进行重构以提取数据特征做预测分析。
1985年,朱迪亚·珀尔提出贝叶斯网络(Bayesian network),他以倡导人工智能的概率方法和发展贝叶斯网络而闻名,还因发展了一种基于结构模型的因果和反事实推理理论而受到赞誉。贝叶斯网络是一种模拟人类推理过程中因果关系的不确定性处理模型,如常见的朴素贝叶斯分类算法就是贝叶斯网络最基本的应用。
贝叶斯网络拓朴结构是一个有向无环图(DAG),通过把某个研究系统中涉及的随机变量,根据是否条件独立绘制在一个有向图中,以描述随机变量之间的条件依赖,用圈表示随机变量(random variables),用箭头表示条件依赖(conditional dependencies)就形成了贝叶斯网络。
对于任意的随机变量,其联合概率可由各自的局部条件概率分布相乘而得出。
1986年,罗德尼·布鲁克斯(Brooks)发表论文《移动机器人鲁棒分层控制系统》,标志着基于行为的机器人学科的创立,机器人学界开始把注意力投向实际工程主题。
1986年,辛顿(Geoffrey Hinton)等人先后提出了多层感知器(MLP)与反向传播(BP)训练相结合的理念(该方法在当时计算力上还是有很多挑战,基本上都是和链式求导的梯度算法相关的),这也解决了单层感知器不能做非线性分类的问题,开启了神经网络新一轮的高潮。
1986年,昆兰(Ross Quinlan)提出ID3决策树算法。
决策树模型可视为多个规则(if, then)的组合,与神经网络黑盒模型截然不同是,它拥有良好的模型解释性。
ID3算法核心的思想是通过自顶向下的贪心策略构建决策树:根据信息增益来选择特征进行划分(信息增益的含义是 引入属性A的信息后,数据D的不确定性减少程度。也就是信息增益越大,区分D的能力就越强),依次递归地构建决策树。
1989年,George Cybenko证明了“万能近似定理”(universal approximation theorem)。简单来说,多层前馈网络可以近似任意函数,其表达力和图灵机等价。这就从根本上消除了Minsky对神经网络表达力的质疑。
“万能近似定理”可视为神经网络的基本理论:⼀个前馈神经⽹络如果具有线性层和⾄少⼀层具有 “挤压” 性质的激活函数(如 sigmoid 等),给定⽹络⾜够数量的隐藏单元,它可以以任意精度来近似任何从⼀个有限维空间到另⼀个有限维空间的 borel 可测函数。
1989年,LeCun (CNN之父) 结合反向传播算法与权值共享的卷积神经层发明了卷积神经网络(Convolutional Neural Network,CNN),并首次将卷积神经网络成功应用到美国邮局的手写字符识别系统中。
卷积神经网络通常由输入层、卷积层、池化(Pooling)层和全连接层组成。卷积层负责提取图像中的局部特征,池化层用来大幅降低参数量级(降维),全连接层类似传统神经网络的部分,用来输出想要的结果。
4 平稳发展期:20世纪90年代—2010年
由于互联网技术的迅速发展,加速了人工智能的创新研究,促使人工智能技术进一步走向实用化,人工智能相关的各个领域都取得长足进步。在2000年代初,由于专家系统的项目都需要编码太多的显式规则,这降低了效率并增加了成本,人工智能研究的重心从基于知识系统转向了机器学习方向。
1995年,Cortes和Vapnik提出联结主义经典的支持向量机(Support Vector Machine),它在解决小样本、非线性及高维模式识别中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中。
支持向量机(Support Vector Machine, SVM)可以视为在感知机基础上的改进,是建立在统计学习理论的VC维理论和结构风险最小原理基础上的广义线性分类器。与感知机主要差异在于:1、感知机目标是找到一个超平面将各样本尽可能分离正确(有无数个),SVM目标是找到一个超平面不仅将各样本尽可能分离正确,还要使各样本离超平面距离最远(只有一个最大边距超平面),SVM的泛化能力更强。2、对于线性不可分的问题,不同于感知机的增加非线性隐藏层,SVM利用核函数,本质上都是实现特征空间非线性变换,使可以被线性分类。
1995年, Freund和schapire提出了 AdaBoost (Adaptive Boosting)算法。AdaBoost采用的是Boosting集成学习方法——串行组合弱学习器以达到更好的泛化性能。另外一种重要集成方法是以随机森林为代表的Bagging并行组合的方式。以“偏差-方差分解”分析,Boosting方法主要优化偏差,Bagging主要优化方差。
Adaboost迭代算法基本思想主要是通过调节的每一轮各训练样本的权重(错误分类的样本权重更高),串行训练出不同分类器。最终以各分类器的准确率作为其组合的权重,一起加权组合成强分类器。
1997年国际商业机器公司(简称IBM)深蓝超级计算机战胜了国际象棋世界冠军卡斯帕罗夫。深蓝是基于暴力穷举实现国际象棋领域的智能,通过生成所有可能的走法,然后执行尽可能深的搜索,并不断对局面进行评估,尝试找出最佳走法。
1997年,Sepp Hochreiter 和 Jürgen Schmidhuber提出了长短期记忆神经网络(LSTM)。
LSTM是一种复杂结构的循环神经网络(RNN),结构上引入了遗忘门、输入门及输出门:输入门决定当前时刻网络的输入数据有多少需要保存到单元状态,遗忘门决定上一时刻的单元状态有多少需要保留到当前时刻,输出门控制当前单元状态有多少需要输出到当前的输出值。这样的结构设计可以解决长序列训练过程中的梯度消失问题。
1998年,万维网联盟的蒂姆·伯纳斯·李(Tim Berners-Lee)提出语义网(Semantic Web)的概念。其核心思想是:通过给万维网上的文档(如HTML)添加能够被计算机所理解的语义(Meta data),从而使整个互联网成为一个基于语义链接的通用信息交换媒介。换言之,就是构建一个能够实现人与电脑无障碍沟通的智能网络。
2001年,John Lafferty首次提出条件随机场模型(Conditional random field,CRF)。
CRF是基于贝叶斯理论框架的判别式概率图模型,在给定条件随机场P ( Y ∣ X ) 和输入序列x,求条件概率最大的输出序列y *。在许多自然语言处理任务中比如分词、命名实体识别等表现尤为出色。
2001年,布雷曼博士提出随机森林(Random Forest)。
随机森林是将多个有差异的弱学习器(决策树)Bagging并行组合,通过建立多个的拟合较好且有差异模型去组合决策,以优化泛化性能的一种集成学习方法。多样差异性可减少对某些特征噪声的依赖,降低方差(过拟合),组合决策可消除些学习器间的偏差。
随机森林算法的基本思路是对于每一弱学习器(决策树)有放回的抽样构造其训练集,并随机抽取其可用特征子集,即以训练样本及特征空间的多样性训练出N个不同的弱学习器,最终结合N个弱学习器的预测(类别或者回归预测数值),取最多数类别或平均值作为最终结果。
2003年,David Blei, Andrew Ng和 Michael I. Jordan于2003年提出LDA(Latent Dirichlet Allocation)。
LDA是一种无监督方法,用来推测文档的主题分布,将文档集中每篇文档的主题以概率分布的形式给出,可以根据主题分布进行主题聚类或文本分类。
2003年,Google公布了3篇大数据奠基性论文,为大数据存储及分布式处理的核心问题提供了思路:非结构化文件分布式存储(GFS)、分布式计算(MapReduce)及结构化数据存储(BigTable),并奠定了现代大数据技术的理论基础。
2005 年,波士顿动力公司推出一款动力平衡四足机器狗,有较强的通用性,可适应较复杂的地形。
2006年,杰弗里·辛顿以及他的学生鲁斯兰·萨拉赫丁诺夫正式提出了深度学习的概念(Deeping Learning),开启了深度学习在学术界和工业界的浪潮。2006年也被称为深度学习元年,杰弗里·辛顿也因此被称为深度学习之父。
深度学习的概念源于人工神经网络的研究,它的本质是使用多个隐藏层网络结构,通过大量的向量计算,学习数据内在信息的高阶表示。
2010年,Sinno Jialin Pan和 Qiang Yang发表文章《迁移学习的调查》。
迁移学习(transfer learning)通俗来讲,就是运用已有的知识(如训练好的网络权重)来学习新的知识以适应特定目标任务,核心是找到已有知识和新知识之间的相似性。
5 蓬勃发展期:2011年至今
随着大数据、云计算、互联网、物联网等信息技术的发展,泛在感知数据和图形处理器等计算平台推动以深度神经网络为代表的人工智能技术飞速发展,大幅跨越了科学与应用之间的技术鸿沟,诸如图像分类、语音识别、知识问答、人机对弈、无人驾驶等人工智能技术实现了重大的技术突破,迎来爆发式增长的新高潮。
2011年,IBM Watson问答机器人参与Jeopardy回答测验比赛最终赢得了冠军。Waston是一个集自然语言处理、知识表示、自动推理及机器学习等技术实现的电脑问答(Q&A)系统。
2012年,Hinton和他的学生Alex Krizhevsky设计的AlexNet神经网络模型在ImageNet竞赛大获全胜,这是史上第一次有模型在 ImageNet 数据集表现如此出色,并引爆了神经网络的研究热情。
AlexNet是一个经典的CNN模型,在数据、算法及算力层面均有较大改进,创新地应用了Data Augmentation、ReLU、Dropout和LRN等方法,并使用GPU加速网络训练。
2012年,谷歌正式发布谷歌知识图谱Google Knowledge Graph),它是Google的一个从多种信息来源汇集的知识库,通过Knowledge Graph来在普通的字串搜索上叠一层相互之间的关系,协助使用者更快找到所需的资料的同时,也可以知识为基础的搜索更近一步,以提高Google搜索的质量。知识图谱是结构化的语义知识库,是符号主义思想的代表方法,用于以符号形式描述物理世界中的概念及其相互关系。其通用的组成单位是RDF三元组(实体-关系-实体),实体间通过关系相互联结,构成网状的知识结构。
2013年,Durk Kingma和Max Welling在ICLR上以文章《Auto-Encoding Variational Bayes》提出变分自编码器(Variational Auto-Encoder,VAE)。
VAE基本思路是将真实样本通过编码器网络变换成一个理想的数据分布,然后把数据分布再传递给解码器网络,构造出生成样本,模型训练学习的过程是使生成样本与真实样本足够接近。
2013年,Google的Tomas Mikolov 在《Efficient Estimation of Word Representation in Vector Space》提出经典的 Word2Vec模型用来学习单词分布式表示,因其简单高效引起了工业界和学术界极大的关注。
Word2Vec基本的思想是学习每个单词与邻近词的关系,从而将单词表示成低维稠密向量。通过这样的分布式表示可以学习到单词的语义信息,直观来看,语义相似的单词的距离相近。
Word2Vec网络结构是一个浅层神经网络(输入层-线性全连接隐藏层->输出层),按训练学习方式可分为CBOW模型(以一个词语作为输入,来预测它的邻近词)或Skip-gram模型 (以一个词语的邻近词作为输入,来预测这个词语)。
2014年,聊天程序“尤金·古斯特曼”(Eugene Goostman)在英国皇家学会举行的“2014图灵测试”大会上,首次“通过”了图灵测试。
2014年,Goodfellow及Bengio等人提出生成对抗网络(Generative Adversarial Network,GAN),被誉为近年来最酷炫的神经网络。
GAN是基于强化学习(RL)思路设计的,由生成网络(Generator, G)和判别网络(Discriminator, D)两部分组成, 生成网络构成一个映射函数G: Z→X(输入噪声z, 输出生成的伪造数据x), 判别网络判别输入是来自真实数据还是生成网络生成的数据。在这样训练的博弈过程中,提高两个模型的生成能力和判别能力。
2015年,为纪念人工智能概念提出60周年,深度学习三巨头LeCun、Bengio和Hinton(他们于2018年共同获得了图灵奖)推出了深度学习的联合综述《Deep learning》。
《Deep learning》文中指出深度学习就是一种特征学习方法,把原始数据通过一些简单的但是非线性的模型转变成为更高层次及抽象的表达,能够强化输入数据的区分能力。通过足够多的转换的组合,非常复杂的函数也可以被学习。
2015年,Microsoft Research的Kaiming He等人提出的残差网络(ResNet)在ImageNet大规模视觉识别竞赛中获得了图像分类和物体识别的优胜。
残差网络的主要贡献是发现了网络不恒等变换导致的“退化现象(Degradation)”,并针对退化现象引入了 “快捷连接(Shortcut connection)”,缓解了在深度神经网络中增加深度带来的梯度消失问题。
2015年,谷歌开源TensorFlow框架。它是一个基于数据流编程(dataflow programming)的符号数学系统,被广泛应用于各类机器学习(machine learning)算法的编程实现,其前身是谷歌的神经网络算法库DistBelief。
2015年,马斯克等人共同创建OpenAI。它是一个非营利的研究组织,使命是确保通用人工智能 (即一种高度自主且在大多数具有经济价值的工作上超越人类的系统)将为全人类带来福祉。其发布热门产品的如:OpenAI Gym,GPT等。
2016年,谷歌提出联邦学习方法,它在多个持有本地数据样本的分散式边缘设备或服务器上训练算法,而不交换其数据样本。
联邦学习保护隐私方面最重要的三大技术分别是: 差分隐私 ( Differential Privacy )、同态加密 ( Homomorphic Encryption )和 隐私保护集合交集 ( Private Set Intersection ),能够使多个参与者在不共享数据的情况下建立一个共同的、强大的机器学习模型,从而解决数据隐私、数据安全、数据访问权限和异构数据的访问等关键问题。
2016年,AlphaGo与围棋世界冠军、职业九段棋手李世石进行围棋人机大战,以4比1的总比分获胜。
AlphaGo是一款围棋人工智能程序,其主要工作原理是“深度学习”,由以下四个主要部分组成:策略网络(Policy Network)给定当前局面,预测并采样下一步的走棋;快速走子(Fast rollout)目标和策略网络一样,但在适当牺牲走棋质量的条件下,速度要比策略网络快1000倍;价值网络(Value Network)估算当前局面的胜率;蒙特卡洛树搜索(Monte Carlo Tree Search)树搜索估算每一种走法的胜率。
在2017年更新的AlphaGo Zero,在此前的版本的基础上,结合了强化学习进行了自我训练。它在下棋和游戏前完全不知道游戏规则,完全是通过自己的试验和摸索,洞悉棋局和游戏的规则,形成自己的决策。随着自我博弈的增加,神经网络逐渐调整,提升下法胜率。更为厉害的是,随着训练的深入,AlphaGo Zero还独立发现了游戏规则,并走出了新策略,为围棋这项古老游戏带来了新的见解。
2017年,中国香港的汉森机器人技术公司(Hanson Robotics)开发的类人机器人索菲亚,是历史上首个获得公民身份的一台机器人。索菲亚看起来就像人类女性,拥有橡胶皮肤,能够表现出超过62种自然的面部表情。其“大脑”中的算法能够理解语言、识别面部,并与人进行互动。
6LLM繁荣发展期:2018年-2023年
整个LLM的发展可以下面这张图来概括:
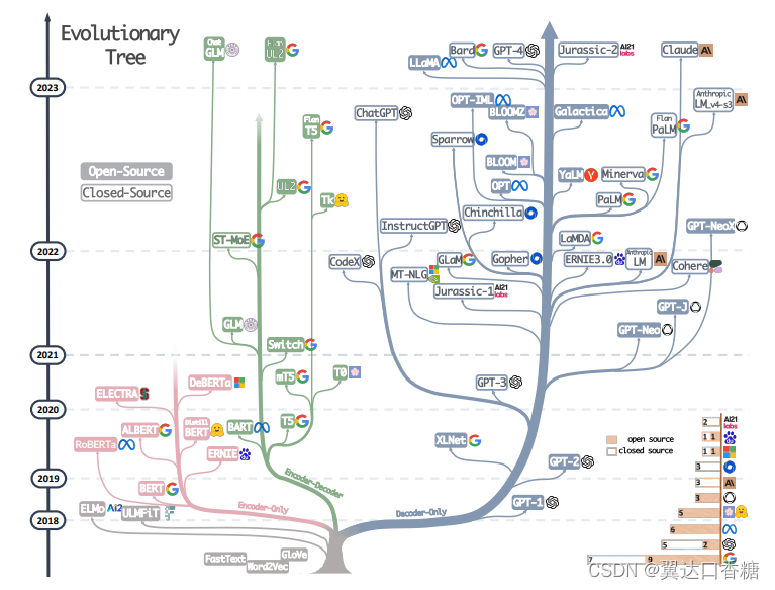
这张图很好地展示了近年来大规模语言模型的发展,并突出了其中的一些
最知名的模型。同一分支上的模型具有更紧密的关系。基于变压器的模型以非灰色显示,蓝色分支中只有解码器的模型,粉色分支中只有编码器的模型,以及绿色的编码器-解码器模型分支。模型在时间轴上的垂直位置表示它们的发布日期。开源模型表示为实心方形,而闭源模型则用空心方形表示。右下角的堆叠条形图显示了来自不同公司和机构的模型数量。
这些模型在其训练策略、模型架构和应用领域上存在差异。为了更清楚地了解LLM的格局,我们将它们分为两类:仅编码器或编码器-解码器语言模型以及仅解码器语言模型。在图1中,我们展示了语言模型的详细演化过程。从这个进化树中,我们得到一些有趣的观察结果:
a)仅解码器模型逐渐主导了LLM的发展。在LLM发展的早期阶段,仅解码器模型不如仅编码器和编码器-解码器模型受欢迎。然而,在2021年之后,随着具有改变游戏规则的LLM(例如GPT-3)的引入,仅解码器模型经历了显著的发展。与此同时,在BERT带来的最初爆炸性增长之后,仅编码器模型逐渐开始衰落。
b)OpenAI始终在LLM领域保持着领导地位,无论是当前还是未来。其他公司和机构在开发与GPT-3和当前的GPT-4相媲美的模型方面努力迎头赶上OpenAI。这种领导地位可以归因于OpenAI对技术道路的坚定承诺,即使最初并不被广泛认可。
c)Meta在开源LLM方面作出了重要贡献,并促进了LLM的研究。在考虑到对开源社区的贡献,特别是与LLM相关的贡献时,Meta凸显出作为最慷慨的商业公司之一,因为Meta开发的所有LLM都是开源的。
d)LLM呈现出趋向于封闭源的趋势。在LLM发展的早期阶段(2020年之前),大多数模型都是开源的。然而,随着GPT-3的引入,公司越来越倾向于封闭其模型,例如PaLM、LaMDA和GPT-4。因此,学术研究人员在LLM训练上进行实验变得更加困难。因此,基于API的研究可能会成为学术界主要的方法。
e)编码器-解码器模型仍然具有前景,因为这种架构仍在积极探索,而且其中大多数都是开源的。谷歌对开源编码器-解码器架构做出了重大贡献。然而,解码器模型的灵活性和多功能性似乎使得谷歌对此方向的坚持不太具有前景。
BERT风格的语言模型:编码器-解码器或仅编码器
由于自然语言数据广泛可得,并且已经提出了无监督的训练范式以更好地利用极大规模的数据集,这促使了对自然语言的无监督学习。一种常见的方法是在考虑周围上下文的情况下预测句子中的掩码词。这种训练范式被称为掩码语言模型。这种训练方式使模型能够更深入地理解单词之间的关系以及它们的上下文使用情况。这些模型使用Transformer架构等技术在大型文本语料库上进行训练,并在许多自然语言处理任务(如情感分析和命名实体识别)中取得了最先进的结果。掩码语言模型的显著示例包括BERT 、RoBERTa和T5。由于在广泛的任务中取得了成功,MLM已成为自然语言处理领域中的重要工具。
GPT风格的语言模型:仅解码器
尽管语言模型通常在体系结构上与任务无关,但这些方法需要在特定下游任务的数据集上进行微调。研究人员发现,扩展语言模型可以显著提高少样本甚至零样本的性能。为了实现更好的少样本和零样本性能,最成功的模型是自回归语言模型,它们通过在给定前面单词的情况下生成序列中的下一个单词来进行训练。这些模型已被广泛用于下游任务,如文本生成和问题回答。自回归语言模型的示例包括GPT-3、OPT 、PaLM和BLOOM 。首次引入的GPT-3是一个游戏改变者,通过提示和上下文学习首次展示了合理的少样本/零样本性能,从而展示了自回归语言模型的优越性。还有一些针对特定任务进行了优化的模型,如CodeX,用于代码生成,以及针对金融领域的BloombergGPT 。最近的突破是ChatGPT,它专门针对会话任务对GPT-3进行了改进,从而在各种实际应用中实现了更加互动、连贯和上下文感知的对话。
参考
论文
Harnessing the Power of LLMs in Practice: A Survey on ChatGPT and Beyond
论文链接
https://arxiv.org/pdf/2304.13712.pdf
参考博客:
https://blog.csdn.net/CSDN_LYY/article/details/116924246

