
- 1大语言模型LLM_llm 大语言模型
- 2tp5使用workerman实现异步任务_tp5 workerman开发异步任务分发
- 3【论文笔记合集】TimesNet之TimesBlock详解_out.reshape .permute
- 4【Android】【Bluetooth Stack】蓝牙电话协议之拨打电话分析(超详细)
- 5安装Spacy问题一览_安装spacy报错
- 6Flink流计算之聚合函数_flink聚合函数
- 7QML 布局
- 8亚马逊aws深度学习_AWS速查表:Amazon Web Services入门时首先要学习的5件事
- 9微软/edge文本转语音API接口_microsoft speech api
- 10LDA主题模型原理解析与python实现_lda python csdn
(1)数据挖掘算法之C4.5_c4.5算法例题
赞
踩
1. 决策树模型与学习
决策树(decision tree)算法基于特征属性进行分类,其主要的优点:模型具有可读性,计算量小,分类速度快。决策树算法包括了由Quinlan提出的ID3与C4.5,Breiman等提出的CART。其中,C4.5是基于ID3的,对分裂属性的目标函数做出了改进。
决策树模型
决策树是一种通过对特征属性的分类对样本进行分类的树形结构,包括有向边与三类节点:
- 根节点(root node),表示第一个特征属性,只有出边没有入边;
- 内部节点(internal node),表示特征属性,有一条入边至少两条出边
- 叶子节点(leaf node),表示类别,只有一条入边没有出边。

上图给出了(二叉)决策树的示例。决策树具有以下特点:
- 对于二叉决策树而言,可以看作是if-then规则集合,由决策树的根节点到叶子节点对应于一条分类规则;
- 分类规则是互斥并且完备的,所谓互斥即每一条样本记录不会同时匹配上两条分类规则,所谓完备即每条样本记录都在决策树中都能匹配上一条规则。
- 分类的本质是对特征空间的划分,如下图所示,

决策树学习
决策树学习的本质是从训练数据集中归纳出一组分类规则[2]。但随着分裂属性次序的不同,所得到的决策树也会不同。如何得到一棵决策树既对训练数据有较好的拟合,又对未知数据有很好的预测呢?
首先,我们要解决两个问题:
- 如何选择较优的特征属性进行分裂?每一次特征属性的分裂,相当于对训练数据集进行再划分,对应于一次决策树的生长。ID3算法定义了目标函数来进行特征选择。
- 什么时候应该停止分裂?有两种自然情况应该停止分裂,一是该节点对应的所有样本记录均属于同一类别,二是该节点对应的所有样本的特征属性值均相等。但除此之外,是不是还应该其他情况停止分裂呢?
2. 决策树算法
特征选择
特征选择指选择最大化所定义目标函数的特征。下面给出如下三种特征(Gender, Car Type, Customer ID)分裂的例子:

图中有两类类别(C0, C1),C0: 6是对C0类别的计数。直观上,应选择Car Type特征进行分裂,因为其类别的分布概率具有更大的倾斜程度,类别不确定程度更小。
为了衡量类别分布概率的倾斜程度,定义决策树节点
的不纯度(impurity),其满足:不纯度越小,则类别的分布概率越倾斜;下面给出不纯度的的三种度量:
其中,
表示对于决策树节点 类别的概率。这三种不纯度的度量是等价的,在等概率分布是达到最大值。
为了判断分裂前后节点不纯度的变化情况,目标函数定义为信息增益(information gain):
对应于决策树节点的不纯度, 表示分裂前的父节点, 表示父节点所包含的样本记录数, 表示父节点分裂后的某子节点, 为其计数,
为分裂后的子节点数。
特别地,ID3算法选取熵值作为不纯度
的度量,则
指父节点对应所有样本记录的类别; 表示选择的特征属性,即 的集合。那么,决策树学习中的信息增益 等价于训练数据集中 类与特征的互信息,表示由于得知特征 的信息训练数据集
不确定性减少的程度。
在特征分裂后,有些子节点的记录数可能偏少,以至于影响分类结果。为了解决这个问题,CART算法提出了只进行特征的二元分裂,即决策树是一棵二叉树;C4.5算法改进分裂目标函数,用信息增益比(information gain ratio)来选择特征:
因而,特征选择的过程等同于计算每个特征的信息增益,选择最大信息增益的特征进行分裂。此即回答前面所提出的第一个问题(选择较优特征)。ID3算法设定一阈值,当最大信息增益小于阈值时,认为没有找到有较优分类能力的特征,没有往下继续分裂的必要。根据最大表决原则,将最多计数的类别作为此叶子节点。即回答前面所提出的第二个问题(停止分裂条件)。
决策树生成
ID3算法的核心是根据信息增益最大的准则,递归地构造决策树;算法流程如下:
- 如果节点满足停止分裂条件(所有记录属同一类别 or 最大信息增益小于阈值),将其置为叶子节点;
- 选择信息增益最大的特征进行分裂;
- 重复步骤1-2,直至分类完成。
C4.5算法流程与ID3相类似,只不过将信息增益改为信息增益比。
3. 决策树剪枝
过拟合
生成的决策树对训练数据会有很好的分类效果,却可能对未知数据的预测不准确,即决策树模型发生过拟合(overfitting)——训练误差(training error)很小、泛化误差(generalization error,亦可看作为test error)较大。下图给出训练误差、测试误差(test error)随决策树节点数的变化情况:
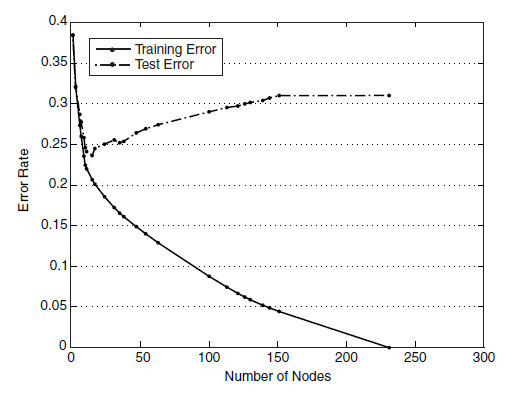
可以观察到,当节点数较小时,训练误差与测试误差均较大,即发生了欠拟合(underfitting)。当节点数较大时,训练误差较小,测试误差却很大,即发生了过拟合。只有当节点数适中是,训练误差居中,测试误差较小;对训练数据有较好的拟合,同时对未知数据有很好的分类准确率。
发生过拟合的根本原因是分类模型过于复杂,可能的原因如下:
- 训练数据集中有噪音样本点,对训练数据拟合的同时也对噪音进行拟合,从而影响了分类的效果;
- 决策树的叶子节点中缺乏有分类价值的样本记录,也就是说此叶子节点应被剪掉。
剪枝策略
为了解决过拟合,C4.5通过剪枝以减少模型的复杂度。[2]中提出一种简单剪枝策略,通过极小化决策树的整体损失函数(loss function)或代价函数(cost function)来实现,决策树
的损失函数为:
其中,
表示决策树的训练误差, 为调节参数,为模型的复杂度。当模型越复杂时,训练的误差就越小。上述定义的损失正好做了两者之间的权衡。
如果剪枝后损失函数减少了,即说明这是有效剪枝。具体剪枝算法可以由动态规划等来实现。
4. 参考资料
[1] Pang-Ning Tan, Michael Steinbach, Vipin Kumar, Introduction to Data Mining.
[2] 李航,《统计学习方法》.
[3] Naren Ramakrishnan, The Top Ten Algorithms in Data Mining.

