
- 1蓝桥杯嵌入式第十五届省赛模拟赛第三场——程序设计部分_蓝桥杯嵌入式15届模拟题
- 22023年认证杯SPSSPRO杯数学建模D题(第一阶段)立体车库的自动调度问题全过程文档及程序_用spsspro做数学建模有
- 3基于 Amazon Lambda 实现 Claude 3 的流式响应
- 4基于深度学习的垃圾检测与分类系统(含UI界面,yolov8、Python代码,数据集)
- 5检查网站连接是否安全
- 6蓝桥杯单片机第14届省赛客观题目+程序题目+程序题参考答案_蓝桥杯单片机14届省赛
- 7el-table 改数据源的值但是不刷新_el-table+el-checkbox不刷新
- 8安全帽检测,工地安全帽检测源码_pyqt5安全帽佩戴检测gui
- 9python基本语句大全_python常见语句汇总
- 102022 年 11 种最佳移动自动化测试工具_移动端自动化测试工具
STM32CubeMX学习笔记(25)——FatFs文件系统使用(操作SPI Flash)_fa_open_always
赞
踩
一、FatFs简介
FatFs 是面向小型嵌入式系统的一种通用的 FAT 文件系统。它完全是由 ANSI C 语言编写并且完全独立于底层的 I/O 介质。因此它可以很容易地不加修改地移植到其他的处理器当中,如 8051、PIC、AVR、SH、Z80、H8、ARM 等。FatFs 支持 FAT12、FAT16、FAT32 等格式,所以我们利用前面写好的 SPI Flash 芯片驱动,把 FatFs 文件系统代码移植到工程之中,就可以利用文件系统的各种函数,对 SPI Flash 芯片以“文件”格式进行读写操作了。
FatFs 文件系统的源码可以从 fatfs 官网下载:
http://elm-chan.org/fsw/ff/00index_e.html
1.1 FatFs文件系统布局

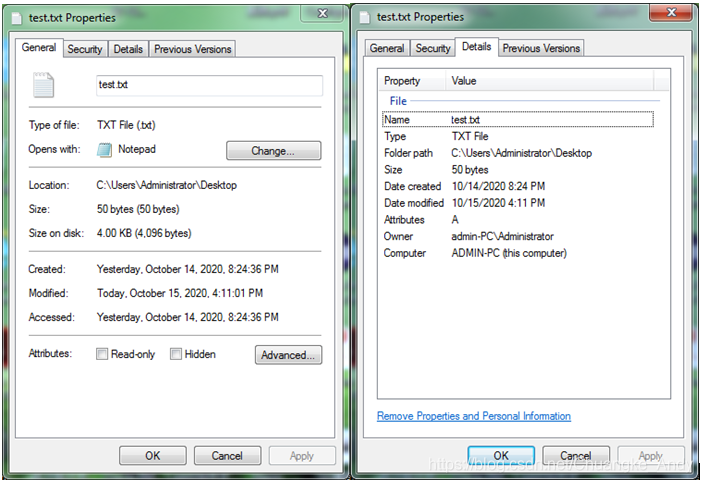
簇是文件存储的最小单元,FAT32分区大小与对应簇空间大小关系如下表示:
| 分区空间大小 | 簇空间大小 | 每个簇包含的扇区数 |
|---|---|---|
| < 8GB | 4KB | 8 |
| [ 8GB, 16GB ) | 8KB | 16 |
| [ 16GB, 32GB ) | 16KB | 32 |
= 32GB | 32KB | 64
例如:创建一个50字节的test.txt文件,文件大小是50字节,但是占用磁盘空间为4096字节(一个簇)
1.2 FatFs层次结构

-
最顶层是应用层:使用者只需要调用FATFS模块提供给用户的一系列应用接口函数(如f_open, f_read, f_write和f_close等),就可以像在PC上读写文件那样简单
-
中间层FATFS模块:实现了FAT文件读写协议;它提供了ff.c和ff.h文件,一般情况下不用修改,使用时将头文件包含进去即可
-
最底层是FATFS模块的底层接口:包括存储媒介读写接口和供给文件创建修改时间的实时时钟,需要在移植时编写对应的代码
FATFS源码相关文件介绍如下表示;移植FATFS模块时,一般只需要修改2个文件(即ffconf.h和diskio.c)
与平台无关:
| 文件 | 说明 |
|---|---|
| ffconf.h | FATFS模块配置文件 |
| ff.h | FATFS和应用模块公用的包含文件 |
| ff.c | FATFS模块 |
| diskio.h | FATFS和disk I/O模块公用的包含文件 |
| interger.h | 数据类型定义 |
| option | 可选的外部功能(比如支持中文) |
与平台相关:
| 文件 | 说明 |
|---|---|
| diskio.c | FATFS和disk I/O模块接口层文件 |
1.3 FatFs API
1.3.1 f_mount
| 功能 | 在FatFs模块上注册、注销一个工作区(文件系统对象) |
|---|---|
| 函数定义 | FRESULT f_mount(FATFS* fs, const TCHAR* path, BYTE opt) |
| 参数 | fs:工作区(文件系统对象)指针 path:注册/注销工作区的逻辑驱动器号 opt:注册或注销选项 |
| 返回 | 操作结果 |
1.3.2 f_open
| 功能 | 创建/打开一个文件对象 |
|---|---|
| 函数定义 | FRESULT f_open(FIL* fp, const TCHAR* path, BYTE mode) |
| 参数 | fp:将被创建的文件对象结构的指针 path:文件名指针,指定将创建或打开的文件名 mode:访问类型和打开方法,由一下标准的一个组合指定的 |
| 返回 | 操作结果 |
| 模式 | 描述 |
|---|---|
| FA_READ | 指定读访问对象。可以从文件中读取数据。 与FA_WRITE 结 合可以进行读写访问。 |
| FA_WRITE | 指定写访问对象。可以向文件中写入数据。与FA_READ 结合 可以进行读写访问。 |
| FA_OPEN_EXISTING | 打开文件。如果文件不存在,则打开失败。(默认) |
| FA_OPEN_ALWAYS | 如果文件存在,则打开;否则,创建一个新文件。 |
| FA_CREATE_NEW | 创建一个新文件。如果文件已存在,则创建失败。 |
| FA_CREATE_ALWAYS | 创建一个新文件。如果文件已存在,则它将被截断并覆盖。 |
1.3.3 f_close
| 功能 | 关闭一个打开的文件 |
|---|---|
| 函数定义 | FRESULT f_close(FIL* fp) |
| 参数 | fp:指向将被关闭的已打开的文件对象结构的指针 |
| 返回 | 操作结果 |
1.3.4 f_read
| 功能 | 从一个打开的文件中读取数据 |
|---|---|
| 函数定义 | FRESULT f_read(FIL* fp, void* buff, UINT btr, UINT* br) |
| 参数 | fp:指向将被读取的已打开的文件对象结构的指针 buff:指向存储读取数据的缓冲区的指针 btr:要读取的字节数 br:指向返回已读取字节数的UINT变量的指针,返回为实际读取的字节数 |
| 返回 | 操作结果 |
1.3.5 f_write
| 功能 | 写入数据到一个已打开的文件 |
|---|---|
| 函数定义 | FRESULT f_write(FIL* fp, void* buff, UINT btw, UINT* bw) |
| 参数 | fp:指向将被写入的已打开的文件对象结构的指针 buff:指向存储写入数据的缓冲区的指针 btw:要写入的字节数 bw:指向返回已写入字节数的UINT变量的指针,返回为实际写入的字节数 |
| 返回 | 操作结果 |
另外FatFs还有很多API操作函数,在这里不再作详细的介绍,详细信息请查看FatFs文件系统官网。
二、新建工程
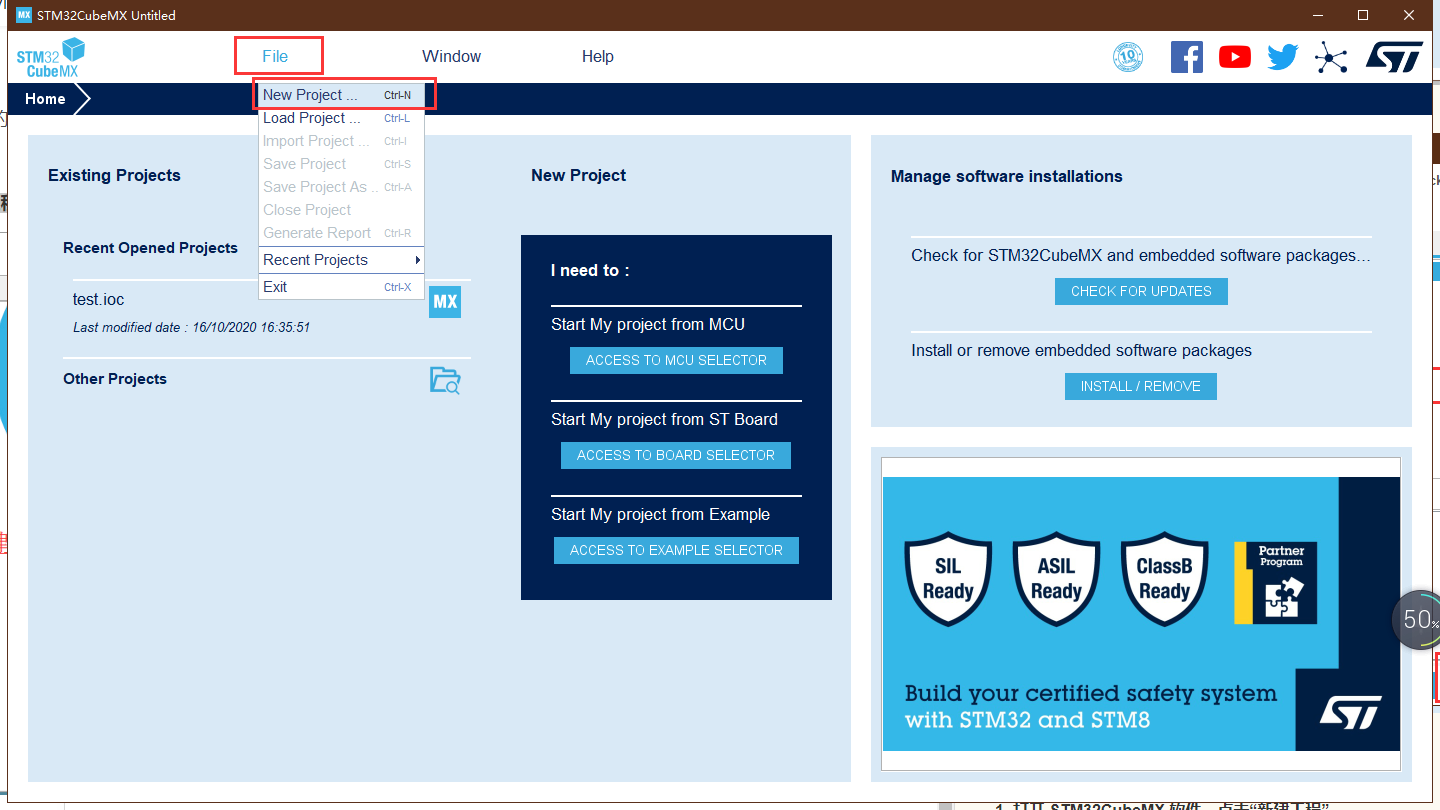
1. 打开 STM32CubeMX 软件,点击“新建工程”
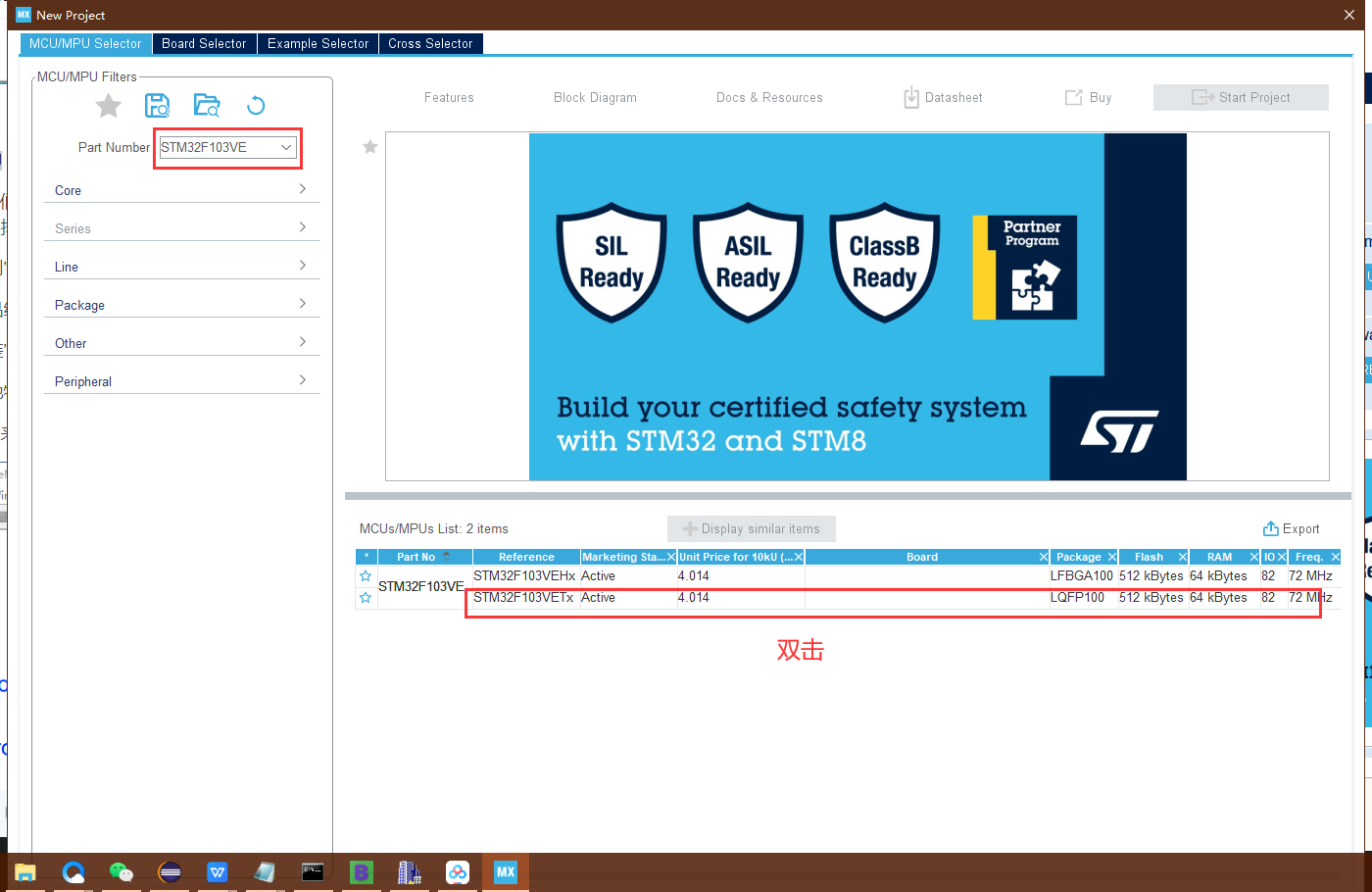
2. 选择 MCU 和封装
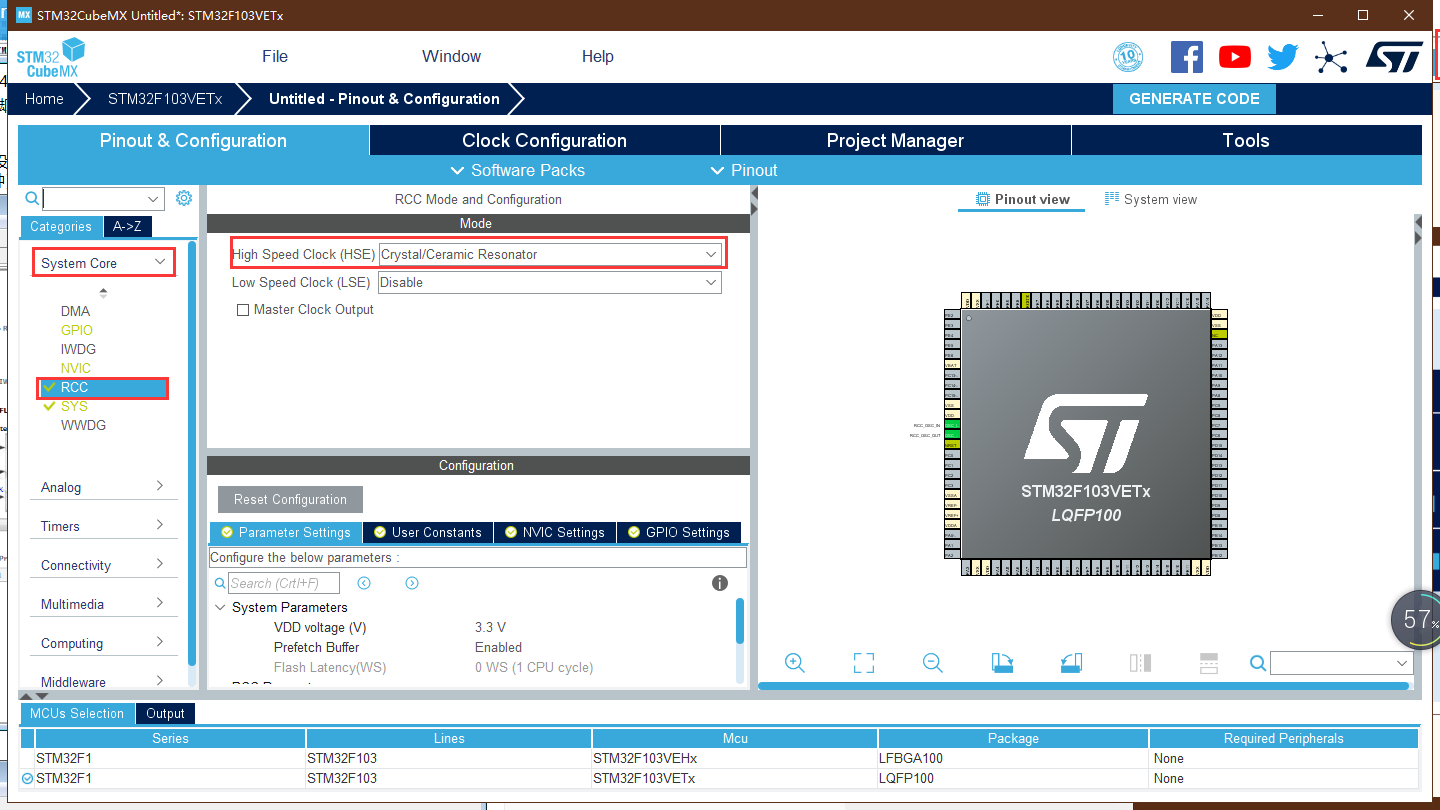
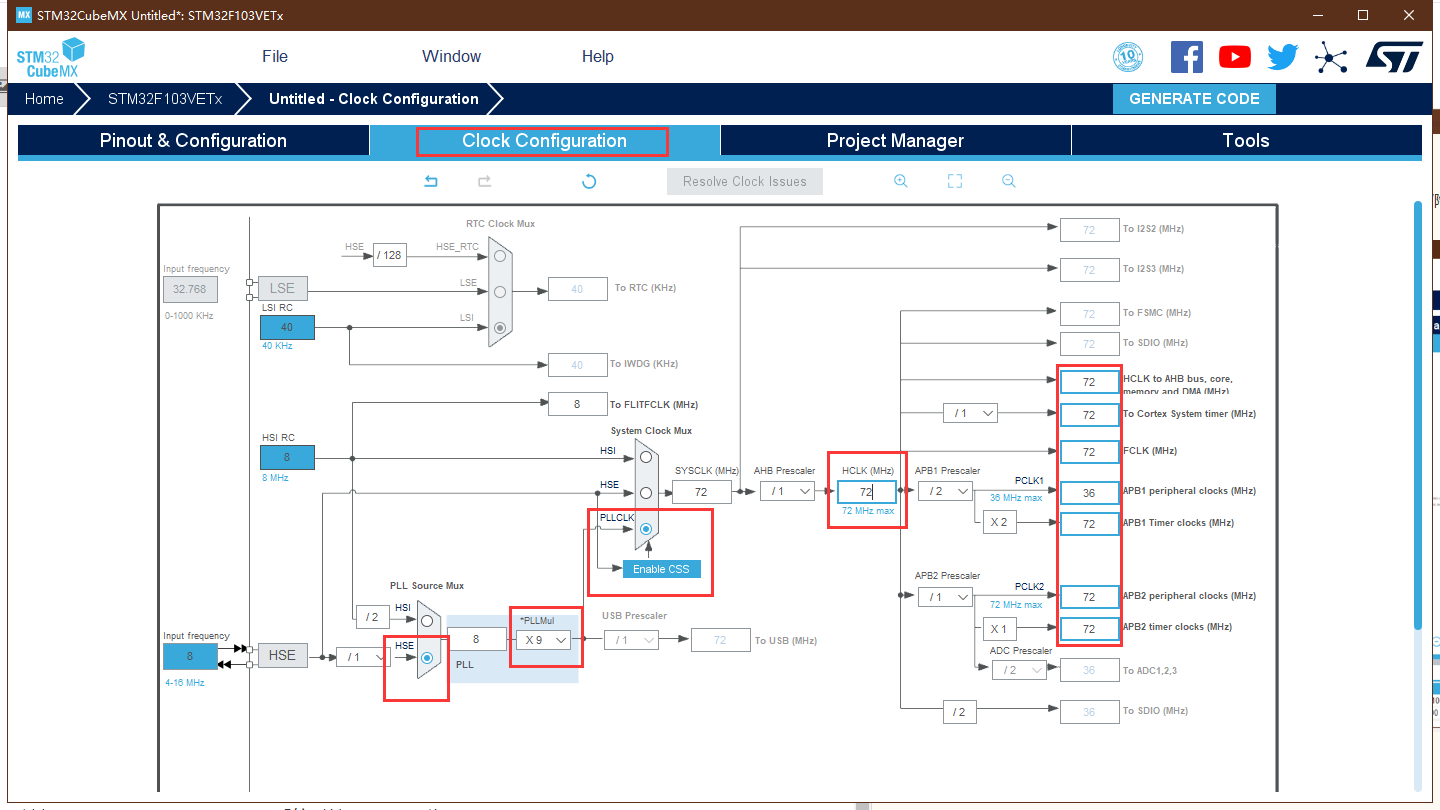
3. 配置时钟
RCC 设置,选择 HSE(外部高速时钟) 为 Crystal/Ceramic Resonator(晶振/陶瓷谐振器)
选择 Clock Configuration,配置系统时钟 SYSCLK 为 72MHz
修改 HCLK 的值为 72 后,输入回车,软件会自动修改所有配置
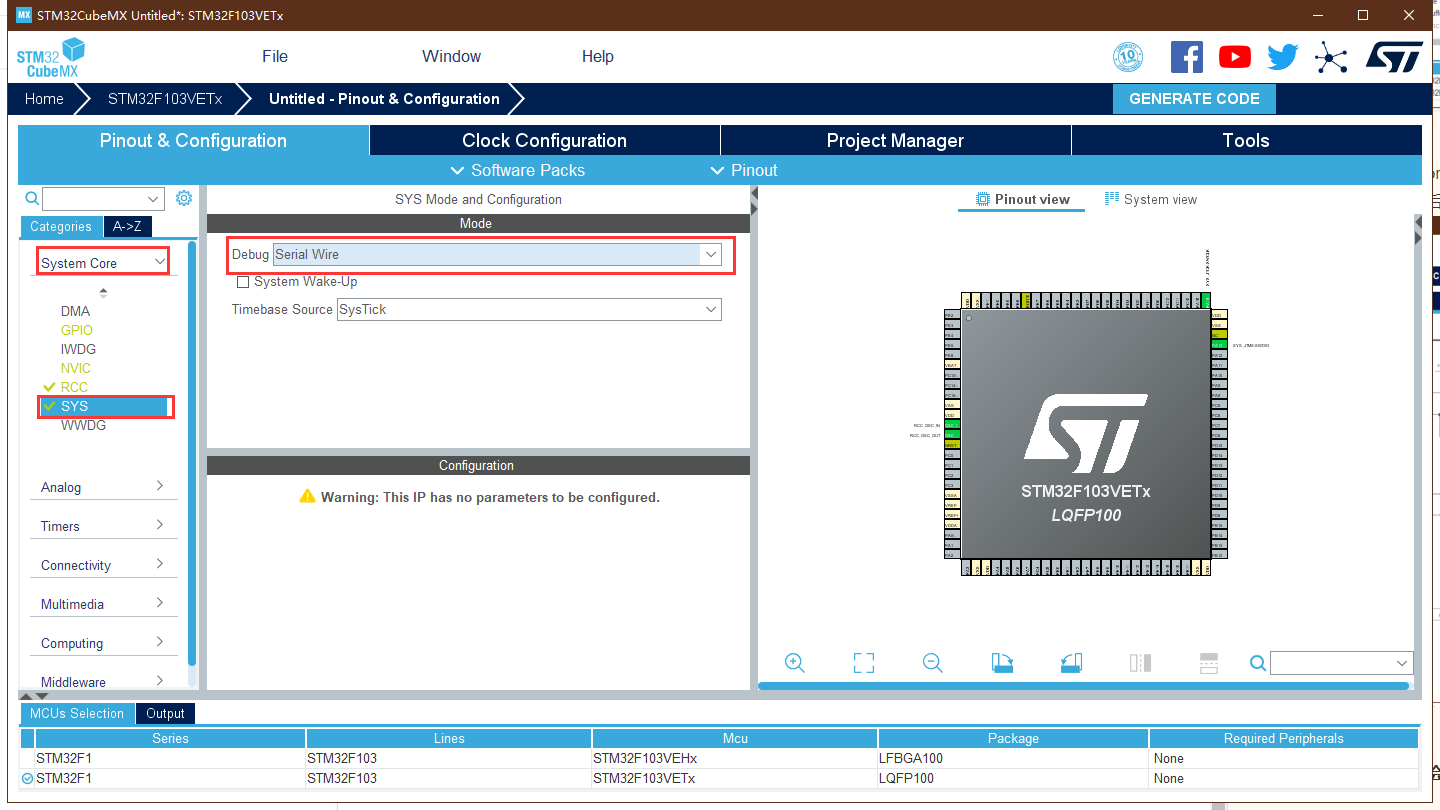
4. 配置调试模式
非常重要的一步,否则会造成第一次烧录程序后续无法识别调试器
SYS 设置,选择 Debug 为 Serial Wire
三、SPI1
3.1 参数配置
在 Connectivity 中选择 SPI1 设置,并选择 Full-Duplex Master 全双工主模式,不开启 NSS 即不使用硬件片选信号
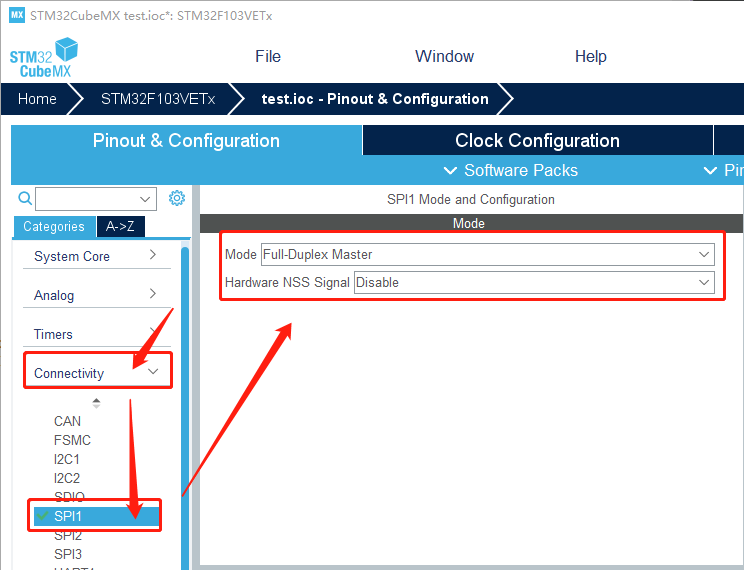
原理图中虽然将 CS 片选接到了硬件 SPI1 的 NSS 引脚,因为硬件 NSS 使用比较麻烦,所以后面直接把 PA4 配置为普通 GPIO,手动控制片选信号。
在右边图中找到 SPI1 NSS 对应引脚,选择 GPIO_Output。纠正:野火STM32F103指南者开发板SPI1 NSS须配置为PC0
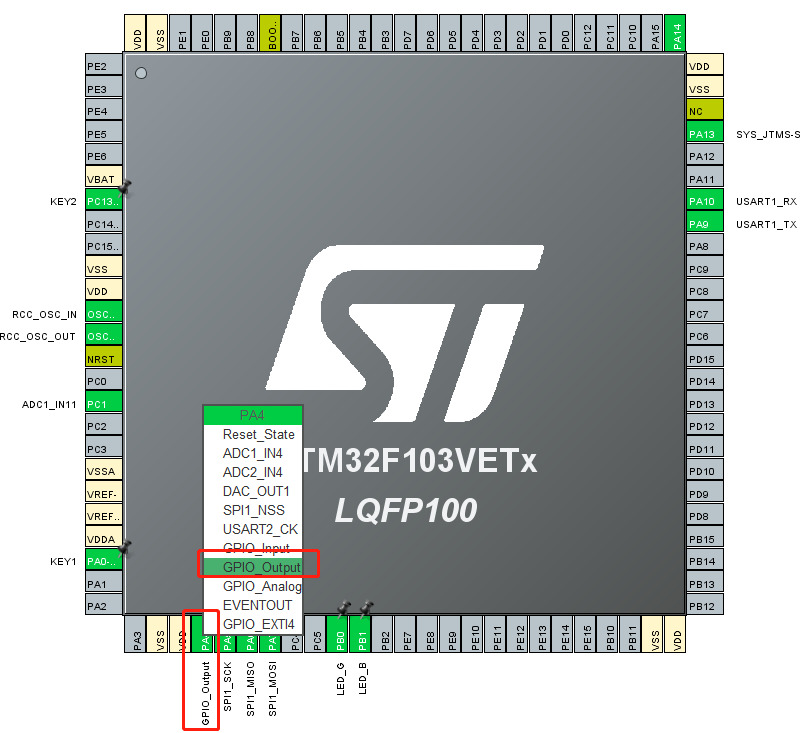
修改输出高电平 High,标签为 W25Q64_CHIP_SELECT。

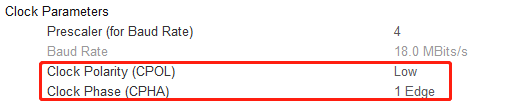
SPI 为默认设置不作修改。只需注意一下,Prescaler 分频系数最低为 4,波特率 (Baud Rate) 为 18.0 MBits/s。这里被限制了,SPI1 最高通信速率可达 36Mbtis/s。
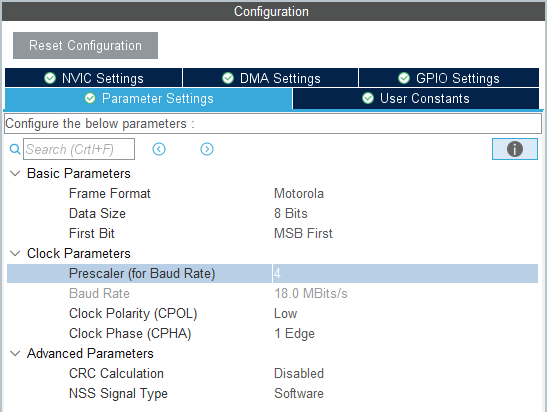
- Clock Polarity(CPOL):SPI 通讯设备处于空闲状态时,SCK 信号线的电平信号(即 SPI 通讯开始前、 NSS 线为高电平时 SCK 的状态)。CPOL=0 时, SCK 在空闲状态时为低电平,CPOL=1 时,则相反。
- Clock Phase(CPHA):指数据的采样的时刻,当 CPHA=0 时,MOSI 或 MISO 数据线上的信号将会在 SCK 时钟线的“奇数边沿”被采样。当 CPHA=1 时,数据线在 SCK 的“偶数边沿”采样。
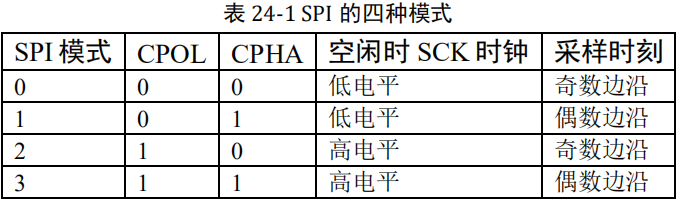
根据 FLASH 芯片的说明,它支持 SPI模式0及模式 3,支持双线全双工,使用 MSB 先行模式,数据帧长度为 8 位。
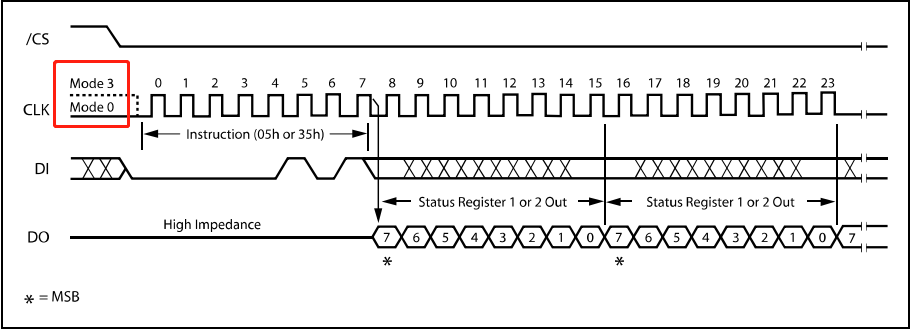
所以这里配置 CPOL 为Low,CPHA 为1 Edge即 SPI模式0。
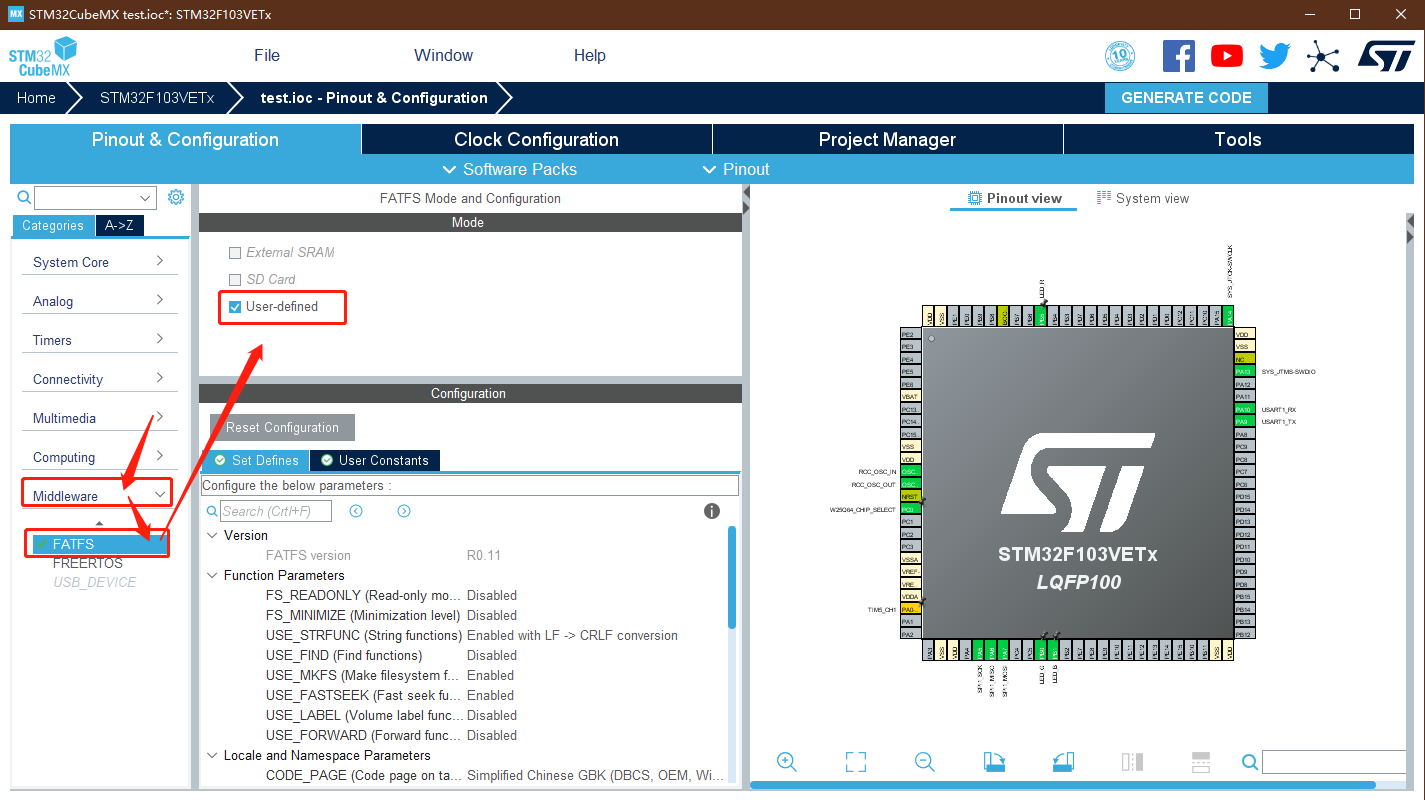
四、FATFS
4.1 参数配置
在 Middleware 中选择 FATFS 设置,并勾选 User-defined 因为 SPI Flash 在上面没有
-
Function Parameters
跳过 -
Locale and Namespace Parameters:
- CODE_PAGE(Code page on target): Simplified Chinese GBK(DBCS,OEM,Windows)
支持简体中文编码 - USE_LFN(Use Long Filename): Enabled with dynamic working buffer on the STACK
支持长文件名,并指定使用栈空间为缓冲区
- CODE_PAGE(Code page on target): Simplified Chinese GBK(DBCS,OEM,Windows)
缓存工作区为什么放在栈?其实fatfs提供了三个选项:BSS,STACK , HEAP,根据个人情况选一个。
在BSS上启用带有静态工作缓冲区的LFN,不能动态分配。
如果选择了HEAP(堆)且自己有属于自己的malloc就去重写ff_memalloc ff_memfree函数。如果是库的malloc就不需要。
一般都选择使用STACK(栈),能动态分配。
当使用堆栈作为工作缓冲区时,请注意堆栈溢出。
- Physical Drive Parameters:
- VOLUMES(Logical drivers): 2
指定物理设备数量,这里设置为 2,包括预留 SD 卡和 SPI Flash 芯片 - MAX_SS(Maximum Sector Size): 4096
指定扇区大小的最大值。SD 卡扇区大小一般都为 512 字节,SPI Flash 芯片扇区大小一般设置为 4096 字节,所以需要把 _MAX_SS 改为 4096 - MIN_SS(Minimum Sector Size): 512
指定扇区大小的最小值
- VOLUMES(Logical drivers): 2

4.2 增大栈空间
将最小栈空间改到 0x1000
注意:由于刚才设置长文件名动态缓存存储在堆中,故需要增大栈大小,如果不修改则程序运行时栈会生成溢出,程序进入硬件错误中断(HardFault),死循环。

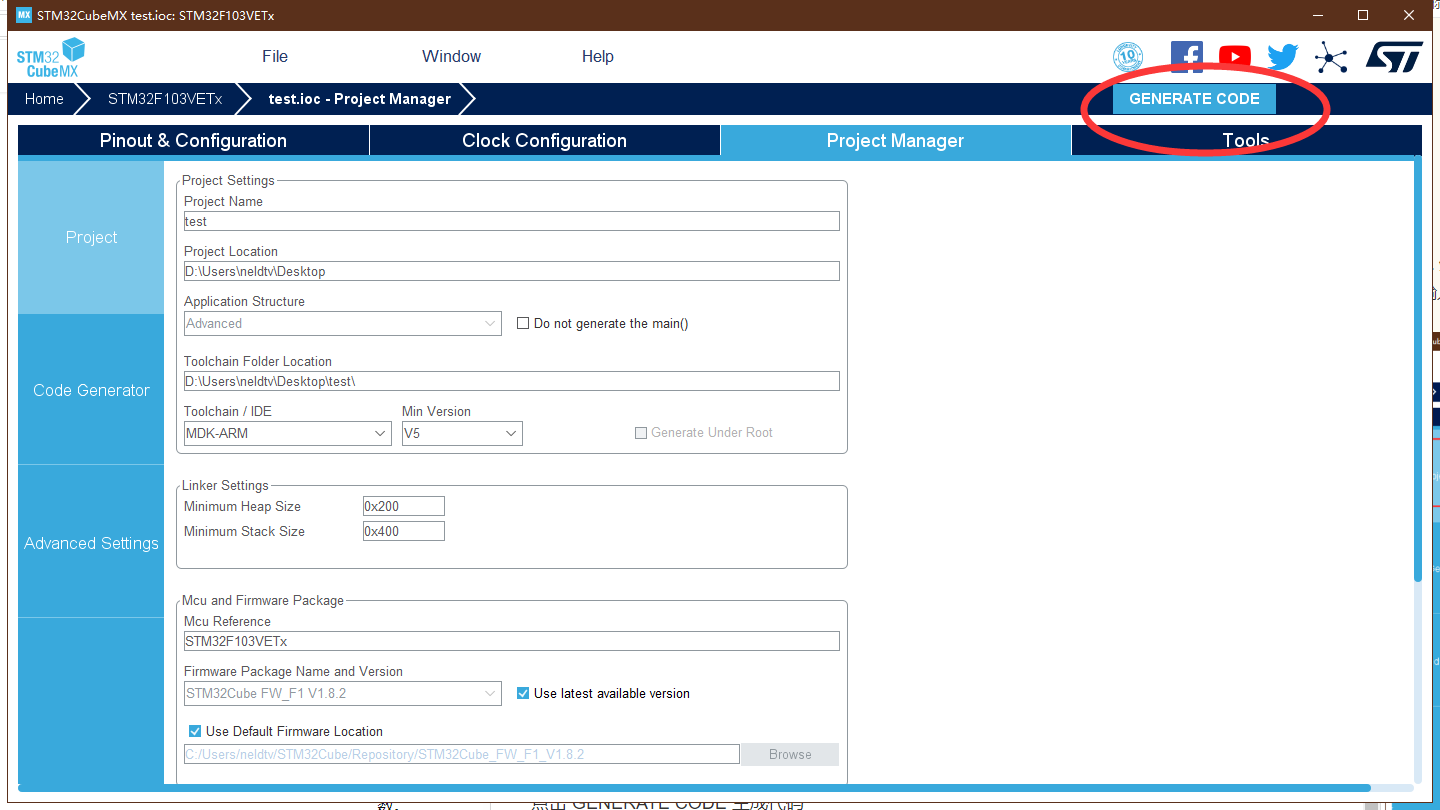
4.3 生成代码
输入项目名和项目路径
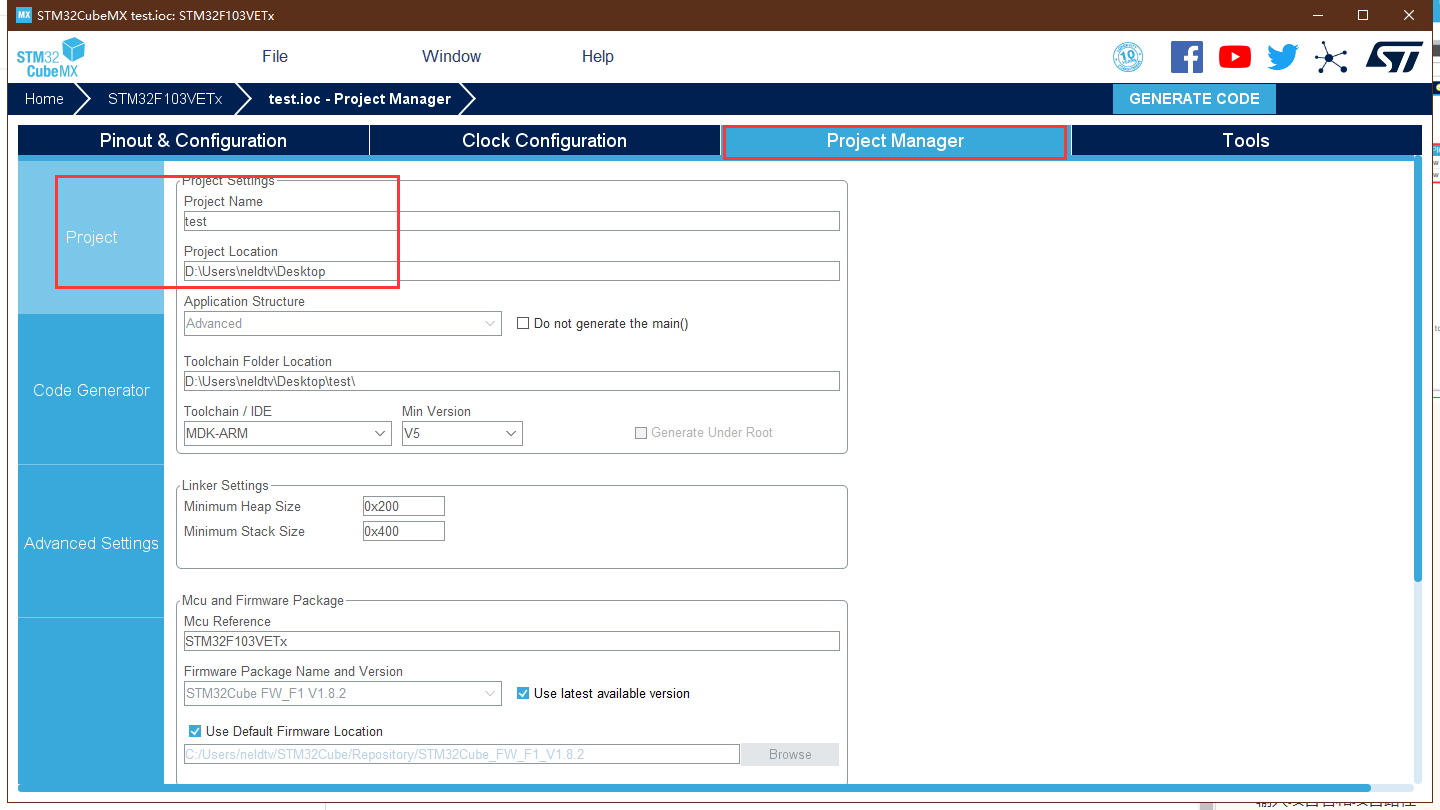
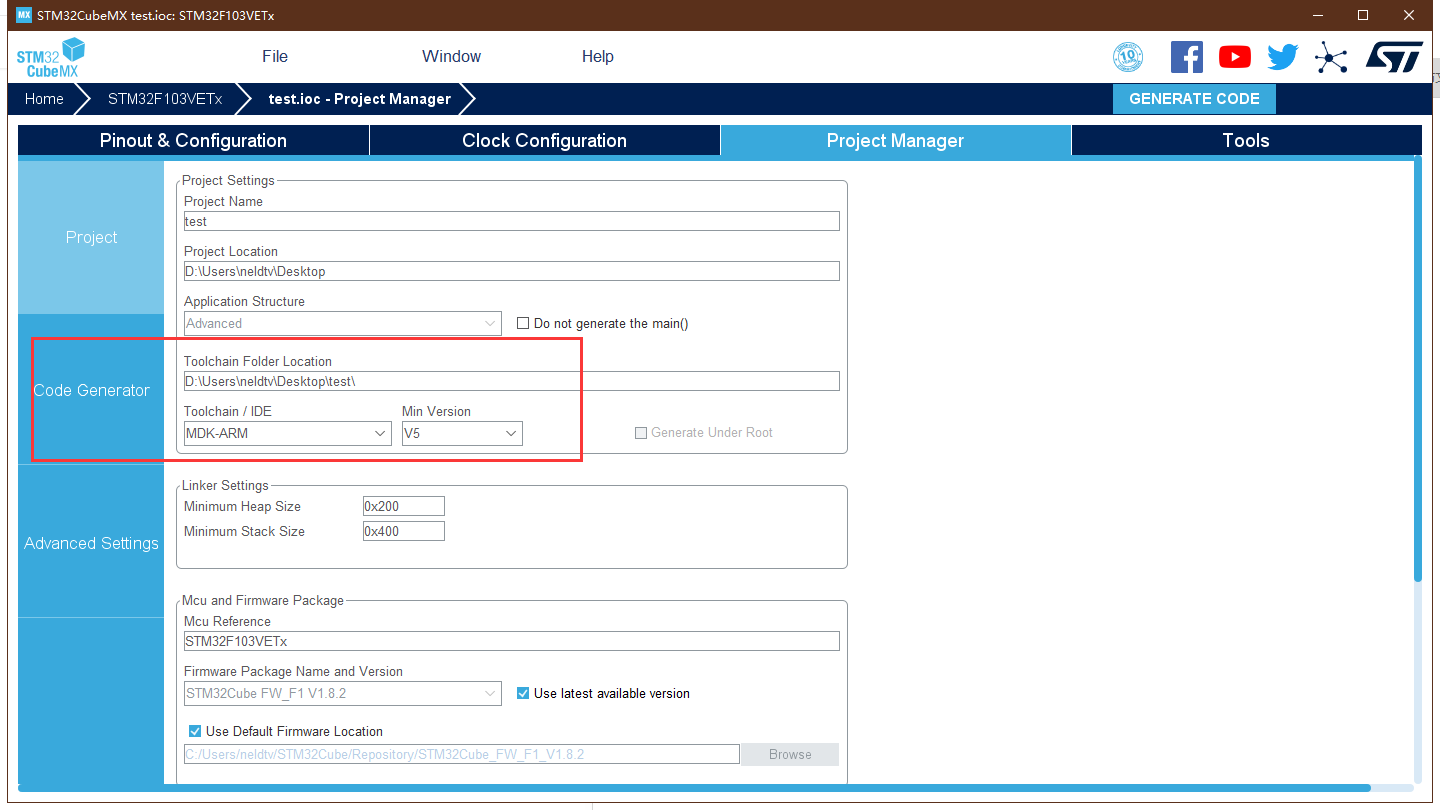
选择应用的 IDE 开发环境 MDK-ARM V5
每个外设生成独立的 ’.c/.h’ 文件
不勾:所有初始化代码都生成在 main.c
勾选:初始化代码生成在对应的外设文件。 如 GPIO 初始化代码生成在 gpio.c 中。
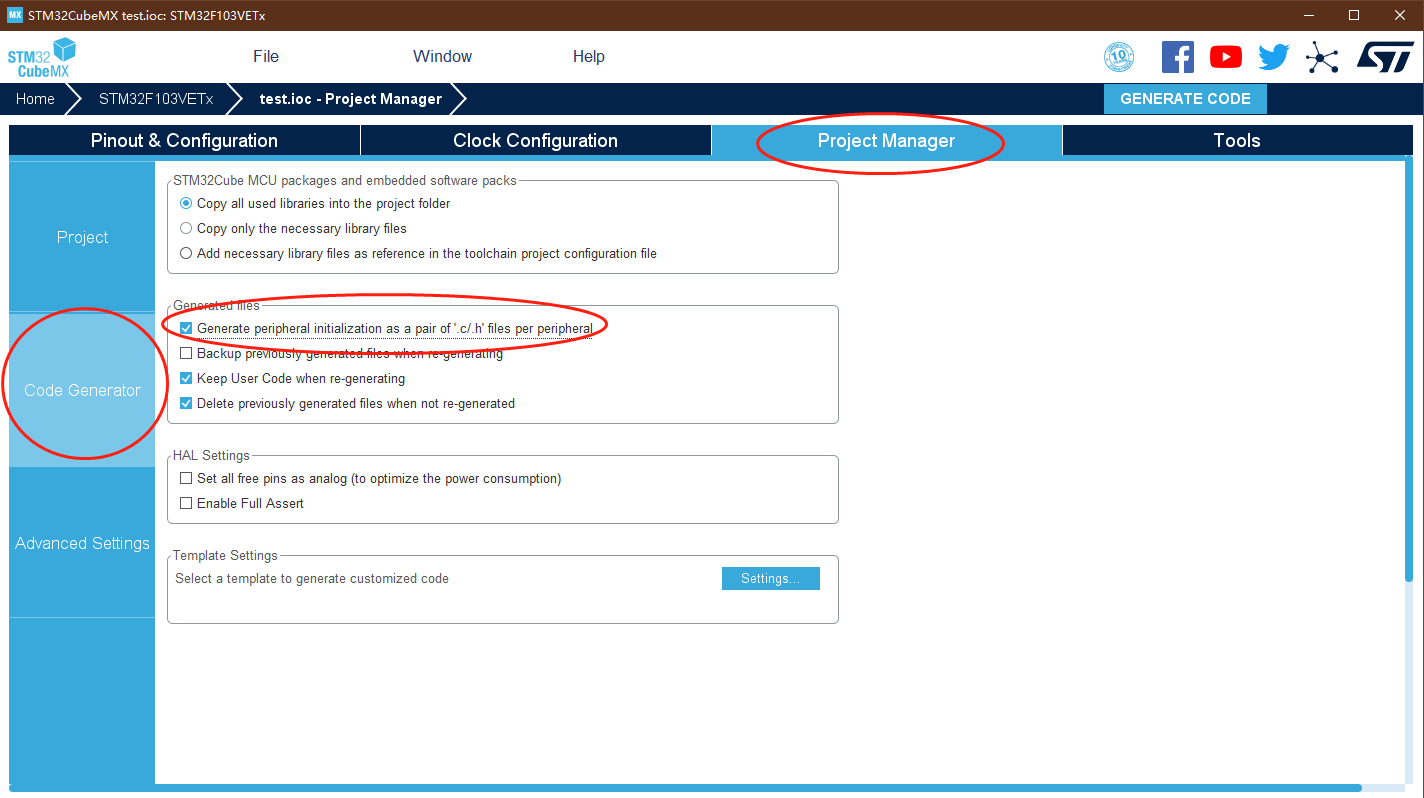
点击 GENERATE CODE 生成代码
五、添加SPI Flash操作函数
在 user_diskio.c 中加入
//#define SPI_FLASH_PageSize 4096 #define SPI_FLASH_PageSize 256 #define SPI_FLASH_PerWritePageSize 256 #define ManufactDeviceID_CMD 0x90 #define READ_STATU_REGISTER_1 0x05 #define READ_STATU_REGISTER_2 0x35 #define READ_DATA_CMD 0x03 #define WRITE_ENABLE_CMD 0x06 #define WRITE_DISABLE_CMD 0x04 #define SECTOR_ERASE_CMD 0x20 #define CHIP_ERASE_CMD 0xc7 #define PAGE_PROGRAM_CMD 0x02 #define SPI_FLASH_CS_LOW() HAL_GPIO_WritePin(W25Q64_CHIP_SELECT_GPIO_Port, W25Q64_CHIP_SELECT_Pin, GPIO_PIN_RESET); #define SPI_FLASH_CS_HIGH() HAL_GPIO_WritePin(W25Q64_CHIP_SELECT_GPIO_Port, W25Q64_CHIP_SELECT_Pin, GPIO_PIN_SET); extern SPI_HandleTypeDef hspi1; /** * @brief SPI发送指定长度的数据 * @param buf —— 发送数据缓冲区首地址 * @param size —— 要发送数据的字节数 * @retval 成功返回HAL_OK */ static HAL_StatusTypeDef SPI_Transmit(uint8_t* send_buf, uint16_t size) { return HAL_SPI_Transmit(&hspi1, send_buf, size, 100); } /** * @brief SPI接收指定长度的数据 * @param buf —— 接收数据缓冲区首地址 * @param size —— 要接收数据的字节数 * @retval 成功返回HAL_OK */ static HAL_StatusTypeDef SPI_Receive(uint8_t* recv_buf, uint16_t size) { return HAL_SPI_Receive(&hspi1, recv_buf, size, 100); } /** * @brief SPI在发送数据的同时接收指定长度的数据 * @param send_buf —— 接收数据缓冲区首地址 * @param recv_buf —— 接收数据缓冲区首地址 * @param size —— 要发送/接收数据的字节数 * @retval 成功返回HAL_OK */ static HAL_StatusTypeDef SPI_TransmitReceive(uint8_t* send_buf, uint8_t* recv_buf, uint16_t size) { return HAL_SPI_TransmitReceive(&hspi1, send_buf, recv_buf, size, 100); } /*等待超时时间*/ #define SPIT_FLAG_TIMEOUT ((uint32_t)0x1000) #define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT)) static __IO uint32_t SPITimeout = SPIT_LONG_TIMEOUT; /** * @brief 等待超时回调函数 * @param None. * @retval None. */ static uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode) { /* 等待超时后的处理,输出错误信息 */ printf("SPI 等待超时!errorCode = %d",errorCode); return 0; } /** * @brief 使用SPI发送一个字节的数据 * @param byte:要发送的数据 * @retval 返回接收到的数据 */ uint8_t SPI_FLASH_SendByte(uint8_t byte) { SPITimeout = SPIT_FLAG_TIMEOUT; /* 等待发送缓冲区为空,TXE事件 */ while (__HAL_SPI_GET_FLAG( &hspi1, SPI_FLAG_TXE ) == RESET) { if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0); } /* 写入数据寄存器,把要写入的数据写入发送缓冲区 */ WRITE_REG(hspi1.Instance->DR, byte); SPITimeout = SPIT_FLAG_TIMEOUT; /* 等待接收缓冲区非空,RXNE事件 */ while (__HAL_SPI_GET_FLAG( &hspi1, SPI_FLAG_RXNE ) == RESET) { if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1); } /* 读取数据寄存器,获取接收缓冲区数据 */ return READ_REG(hspi1.Instance->DR); } /** * @brief 读取Flash内部的ID * @param none * @retval 成功返回device_id */ uint16_t W25QXX_ReadID(void) { uint8_t recv_buf[2] = {0}; //recv_buf[0]存放Manufacture ID, recv_buf[1]存放Device ID uint16_t device_id = 0; uint8_t send_data[4] = {ManufactDeviceID_CMD,0x00,0x00,0x00}; //待发送数据,命令+地址 /* 使能片选 */ SPI_FLASH_CS_LOW(); /* 发送并读取数据 */ if (HAL_OK == SPI_Transmit(send_data, 4)) { if (HAL_OK == SPI_Receive(recv_buf, 2)) { device_id = (recv_buf[0] << 8) | recv_buf[1]; } } /* 取消片选 */ SPI_FLASH_CS_HIGH(); return device_id; } /** * @brief 读取W25QXX的状态寄存器,W25Q64一共有2个状态寄存器 * @param reg —— 状态寄存器编号(1~2) * @retval 状态寄存器的值 */ static uint8_t W25QXX_ReadSR(uint8_t reg) { uint8_t result = 0; uint8_t send_buf[4] = {0x00,0x00,0x00,0x00}; switch(reg) { case 1: send_buf[0] = READ_STATU_REGISTER_1; case 2: send_buf[0] = READ_STATU_REGISTER_2; case 0: default: send_buf[0] = READ_STATU_REGISTER_1; } /* 使能片选 */ SPI_FLASH_CS_LOW(); if (HAL_OK == SPI_Transmit(send_buf, 4)) { if (HAL_OK == SPI_Receive(&result, 1)) { /* 取消片选 */ SPI_FLASH_CS_HIGH(); return result; } } /* 取消片选 */ SPI_FLASH_CS_HIGH(); return 0; } /** * @brief 阻塞等待Flash处于空闲状态 * @param none * @retval none */ static void W25QXX_Wait_Busy(void) { while((W25QXX_ReadSR(1) & 0x01) == 0x01); // 等待BUSY位清空 } /** * @brief W25QXX写使能,将S1寄存器的WEL置位 * @param none * @retval */ void W25QXX_Write_Enable(void) { uint8_t cmd= WRITE_ENABLE_CMD; SPI_FLASH_CS_LOW(); SPI_Transmit(&cmd, 1); SPI_FLASH_CS_HIGH(); W25QXX_Wait_Busy(); } /** * @brief W25QXX写禁止,将WEL清零 * @param none * @retval none */ void W25QXX_Write_Disable(void) { uint8_t cmd = WRITE_DISABLE_CMD; SPI_FLASH_CS_LOW(); SPI_Transmit(&cmd, 1); SPI_FLASH_CS_HIGH(); W25QXX_Wait_Busy(); } /** * @brief W25QXX擦除一个扇区 * @param sector_addr —— 扇区地址 根据实际容量设置 * @retval none * @note 阻塞操作 */ void W25QXX_Erase_Sector(uint32_t sector_addr) { W25QXX_Write_Enable(); //擦除操作即写入0xFF,需要开启写使能 W25QXX_Wait_Busy(); //等待写使能完成 /* 使能片选 */ SPI_FLASH_CS_LOW(); /* 发送扇区擦除指令*/ SPI_FLASH_SendByte(SECTOR_ERASE_CMD); /*发送擦除扇区地址的高位*/ SPI_FLASH_SendByte((sector_addr & 0xFF0000) >> 16); /* 发送擦除扇区地址的中位 */ SPI_FLASH_SendByte((sector_addr & 0xFF00) >> 8); /* 发送擦除扇区地址的低位 */ SPI_FLASH_SendByte(sector_addr & 0xFF); /* 取消片选 */ SPI_FLASH_CS_HIGH(); W25QXX_Wait_Busy(); //等待扇区擦除完成 } /** * @brief 页写入操作 * @param dat —— 要写入的数据缓冲区首地址 * @param WriteAddr —— 要写入的地址 * @param byte_to_write —— 要写入的字节数(0-256) * @retval none */ void W25QXX_PageProgram(uint8_t* dat, uint32_t WriteAddr, uint16_t nbytes) { uint8_t cmd = PAGE_PROGRAM_CMD; // WriteAddr <<= 8; W25QXX_Write_Enable(); /* 使能片选 */ SPI_FLASH_CS_LOW(); SPI_Transmit(&cmd, 1); // SPI_Transmit((uint8_t*)&WriteAddr, 3); uint8_t addr; HAL_StatusTypeDef status; /* 发送 读 地址高位 */ addr = (WriteAddr & 0xFF0000) >> 16; status = SPI_Transmit(&addr, 1); /* 发送 读 地址中位 */ addr = (WriteAddr & 0xFF00) >> 8; status = SPI_Transmit(&addr, 1); /* 发送 读 地址低位 */ addr = WriteAddr & 0xFF; status = SPI_Transmit(&addr, 1); SPI_Transmit(dat, nbytes); /* 取消片选 */ SPI_FLASH_CS_HIGH(); W25QXX_Wait_Busy(); } /** * @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区 * @param pBuffer,要写入数据的指针 * @param WriteAddr,写入地址 * @param NumByteToWrite,写入数据长度 * @retval 无 */ void W25QXX_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite) { uint8_t NumOfPage = 0; uint8_t NumOfSingle = 0; uint8_t Addr = 0; uint8_t count = 0; uint8_t temp = 0; /*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/ Addr = WriteAddr % SPI_FLASH_PageSize; /*差count个数据值,刚好可以对齐到页地址*/ count = SPI_FLASH_PageSize - Addr; /*计算出要写多少整数页*/ NumOfPage = NumByteToWrite / SPI_FLASH_PageSize; /*mod运算求余,计算出剩余不满一页的字节数*/ NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize; /* Addr=0,则WriteAddr 刚好按页对齐 aligned */ if(Addr == 0) { /* NumByteToWrite < SPI_FLASH_PageSize */ if(NumOfPage == 0) { W25QXX_PageProgram(pBuffer, WriteAddr, NumByteToWrite); } /* NumByteToWrite > SPI_FLASH_PageSize */ else { /*先把整数页都写了*/ while(NumOfPage--) { W25QXX_PageProgram(pBuffer, WriteAddr, SPI_FLASH_PageSize); WriteAddr += SPI_FLASH_PageSize; pBuffer += SPI_FLASH_PageSize; } /*若有多余的不满一页的数据,把它写完*/ W25QXX_PageProgram(pBuffer, WriteAddr, NumOfSingle); } } /* 若地址与 SPI_FLASH_PageSize 不对齐 */ else { /* NumByteToWrite < SPI_FLASH_PageSize */ if(NumOfPage == 0) { /*当前页剩余的count个位置比NumOfSingle小,写不完*/ if(NumOfSingle > count) { temp = NumOfSingle - count; /*先写满当前页*/ W25QXX_PageProgram(pBuffer, WriteAddr, count); WriteAddr += count; pBuffer += count; /*再写剩余的数据*/ W25QXX_PageProgram(pBuffer, WriteAddr, temp); } /*当前页剩余的count个位置能写完NumOfSingle个数据*/ else { W25QXX_PageProgram(pBuffer, WriteAddr, NumByteToWrite); } } /* NumByteToWrite > SPI_FLASH_PageSize */ else { /*地址不对齐多出的count分开处理,不加入这个运算*/ NumByteToWrite -= count; NumOfPage = NumByteToWrite / SPI_FLASH_PageSize; NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize; W25QXX_PageProgram(pBuffer, WriteAddr, count); WriteAddr += count; pBuffer += count; /*把整数页都写了*/ while(NumOfPage--) { W25QXX_PageProgram(pBuffer, WriteAddr, SPI_FLASH_PageSize); WriteAddr += SPI_FLASH_PageSize; pBuffer += SPI_FLASH_PageSize; } /*若有多余的不满一页的数据,把它写完*/ if(NumOfSingle != 0) { W25QXX_PageProgram(pBuffer, WriteAddr, NumOfSingle); } } } } /** * @brief 读取FLASH数据 * @param pBuffer,存储读出数据的指针 * @param ReadAddr,读取地址 * @param NumByteToRead,读取数据长度 * @retval 无 */ void W25QXX_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead) { W25QXX_Wait_Busy(); /* 选择FLASH: CS低电平 */ SPI_FLASH_CS_LOW(); /* 发送 读 指令 */ uint8_t cmd = READ_DATA_CMD; SPI_Transmit(&cmd, 1); // 不知道为什么连起来发不行 // ReadAddr = ReadAddr << 8; // SPI_Transmit((uint8_t*)&ReadAddr, 3); uint8_t addr; HAL_StatusTypeDef status; /* 发送 读 地址高位 */ addr = (ReadAddr & 0xFF0000) >> 16; status = SPI_Transmit(&addr, 1); /* 发送 读 地址中位 */ addr = (ReadAddr& 0xFF00) >> 8; status = SPI_Transmit(&addr, 1); /* 发送 读 地址低位 */ addr = ReadAddr & 0xFF; status = SPI_Transmit(&addr, 1); if(HAL_OK == status) { SPI_Receive(pBuffer, NumByteToRead); } /* 停止信号 FLASH: CS 高电平 */ SPI_FLASH_CS_HIGH(); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
六、修改diskio接口函数
在 user_diskio.c 中修改以下几个函数:
/* Private functions ---------------------------------------------------------*/ /** * @brief Initializes a Drive * @param pdrv: Physical drive number (0..) * @retval DSTATUS: Operation status */ DSTATUS USER_initialize ( BYTE pdrv /* Physical drive nmuber to identify the drive */ ) { /* USER CODE BEGIN INIT */ /* 延时一小段时间 */ uint16_t i; i = 500; while(--i); Stat = STA_NOINIT; if(W25QXX_ReadID() != 0) { Stat &= ~STA_NOINIT; } return Stat; /* USER CODE END INIT */ } /** * @brief Gets Disk Status * @param pdrv: Physical drive number (0..) * @retval DSTATUS: Operation status */ DSTATUS USER_status ( BYTE pdrv /* Physical drive number to identify the drive */ ) { /* USER CODE BEGIN STATUS */ Stat &= ~STA_NOINIT; return Stat; /* USER CODE END STATUS */ } /** * @brief Reads Sector(s) * @param pdrv: Physical drive number (0..) * @param *buff: Data buffer to store read data * @param sector: Sector address (LBA) * @param count: Number of sectors to read (1..128) * @retval DRESULT: Operation result */ DRESULT USER_read ( BYTE pdrv, /* Physical drive nmuber to identify the drive */ BYTE *buff, /* Data buffer to store read data */ DWORD sector, /* Sector address in LBA */ UINT count /* Number of sectors to read */ ) { /* USER CODE BEGIN READ */ DRESULT status = RES_PARERR; if(!count) { return RES_PARERR; //count不能等于0,否则返回参数错误 } // /* 扇区偏移2MB,外部Flash文件系统空间放在SPI Flash后面6MB空间 */ // sector += 512; W25QXX_BufferRead(buff, sector << 12, count << 12); status = RES_OK; return status; /* USER CODE END READ */ } /** * @brief Writes Sector(s) * @param pdrv: Physical drive number (0..) * @param *buff: Data to be written * @param sector: Sector address (LBA) * @param count: Number of sectors to write (1..128) * @retval DRESULT: Operation result */ #if _USE_WRITE == 1 DRESULT USER_write ( BYTE pdrv, /* Physical drive nmuber to identify the drive */ const BYTE *buff, /* Data to be written */ DWORD sector, /* Sector address in LBA */ UINT count /* Number of sectors to write */ ) { /* USER CODE BEGIN WRITE */ uint32_t write_addr; DRESULT status = RES_PARERR; if(!count) { return RES_PARERR; /* Check parameter */ } ///* 扇区偏移2MB,外部Flash文件系统空间放在SPI Flash后面6MB空间 */ //sector += 512; write_addr = sector << 12; W25QXX_Erase_Sector(write_addr); W25QXX_BufferWrite((uint8_t *)buff, write_addr, count << 12); status = RES_OK; return status; /* USER CODE END WRITE */ } #endif /* _USE_WRITE == 1 */ /** * @brief I/O control operation * @param pdrv: Physical drive number (0..) * @param cmd: Control code * @param *buff: Buffer to send/receive control data * @retval DRESULT: Operation result */ #if _USE_IOCTL == 1 DRESULT USER_ioctl ( BYTE pdrv, /* Physical drive nmuber (0..) */ BYTE cmd, /* Control code */ void *buff /* Buffer to send/receive control data */ ) { /* USER CODE BEGIN IOCTL */ DRESULT status = RES_OK; switch(cmd) { case CTRL_SYNC : break; /* 扇区数量:1536*4096/1024/1024=6(MB) */ case GET_SECTOR_COUNT: *(DWORD * )buff = 1536; break; /* 扇区大小 */ case GET_SECTOR_SIZE : *(WORD * )buff = 4096; break; /* 同时擦除扇区个数 */ case GET_BLOCK_SIZE : *(DWORD * )buff = 1; break; case CTRL_TRIM: break; default: status = RES_PARERR; break; } return status; /* USER CODE END IOCTL */ } #endif /* _USE_IOCTL == 1 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
七、修改main函数
/* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ UINT fnum; /* 文件成功读写数量 */ BYTE ReadBuffer[1024] = {0}; /* 读缓冲区 */ BYTE WriteBuffer[]= "Hello World!\n"; /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_USART1_UART_Init(); MX_SPI1_Init(); MX_FATFS_Init(); /* USER CODE BEGIN 2 */ printf("****** 这是一个SPI FLASH 文件系统实验 ******\r\n"); // 在外部SPI Flash挂载文件系统,文件系统挂载时会对SPI设备初始化 retUSER = f_mount(&USERFatFS, USERPath, 1); /*----------------------- 格式化测试 -----------------*/ /* 如果没有文件系统就格式化创建创建文件系统 */ if(retUSER == FR_NO_FILESYSTEM) { printf("》FLASH还没有文件系统,即将进行格式化...\r\n"); /* 格式化 */ retUSER = f_mkfs(USERPath, 0, 0); if(retUSER == FR_OK) { printf("》FLASH已成功格式化文件系统。\r\n"); /* 格式化后,先取消挂载 */ retUSER = f_mount(NULL, USERPath, 1); /* 重新挂载 */ retUSER = f_mount(&USERFatFS, USERPath, 1); } else { printf("《《格式化失败。》》\r\n"); while(1); } } else if(retUSER != FR_OK) { printf("!!外部Flash挂载文件系统失败。(%d)\r\n", retUSER); printf("!!可能原因:SPI Flash初始化不成功。\r\n"); while(1); } else { printf("》文件系统挂载成功,可以进行读写测试\r\n"); } /*----------------------- 文件系统测试:写测试 -------------------*/ /* 打开文件,每次都以新建的形式打开,属性为可写 */ printf("\r\n****** 即将进行文件写入测试... ******\r\n"); retUSER = f_open(&USERFile, "test.txt", FA_CREATE_ALWAYS | FA_WRITE); if(retUSER == FR_OK) { printf("》打开/创建FatFs读写测试文件.txt文件成功,向文件写入数据。\r\n"); /* 将指定存储区内容写入到文件内 */ retUSER = f_write(&USERFile, WriteBuffer, sizeof(WriteBuffer), &fnum); if(retUSER == FR_OK) { printf("》文件写入成功,写入字节数据:%d\n", fnum); printf("》向文件写入的数据为:\r\n%s\r\n", WriteBuffer); } else { printf("!!文件写入失败:(%d)\n", retUSER); } /* 不再读写,关闭文件 */ f_close(&USERFile); } else { printf("!!打开/创建文件失败。\r\n"); } /*------------------- 文件系统测试:读测试 --------------------------*/ printf("****** 即将进行文件读取测试... ******\r\n"); retUSER = f_open(&USERFile, "test.txt",FA_OPEN_EXISTING | FA_READ); if(retUSER == FR_OK) { printf("》打开文件成功。\r\n"); retUSER = f_read(&USERFile, ReadBuffer, sizeof(ReadBuffer), &fnum); if(retUSER==FR_OK) { printf("》文件读取成功,读到字节数据:%d\r\n",fnum); printf("》读取得的文件数据为:\r\n%s \r\n", ReadBuffer); } else { printf("!!文件读取失败:(%d)\n",retUSER); } } else { printf("!!打开文件失败。\r\n"); } /* 不再读写,关闭文件 */ f_close(&USERFile); /* 不再使用文件系统,取消挂载文件系统 */ f_mount(NULL,"1:",1); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
八、查看打印
串口打印功能查看 STM32CubeMX学习笔记(6)——USART串口使用

九、工程代码
链接:https://pan.baidu.com/s/1WAfBj091e7IJVLwaL1HyHA 提取码:w24p
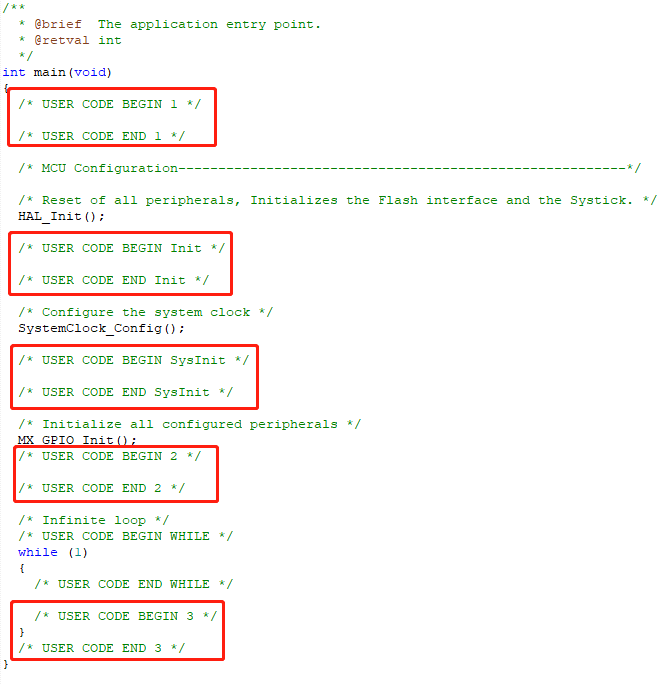
十、注意事项
用户代码要加在 USER CODE BEGIN N 和 USER CODE END N 之间,否则下次使用 STM32CubeMX 重新生成代码后,会被删除。
• 由 Leung 写于 2021 年 4 月 2 日
• 参考:【STM32CubeMx你不知道的那些事】第九章:STM32CubeMx的SPI外置FLASH+文件系统(FATFS)
STM32CubeMX系列|FATFS文件系统
使用STM32CUBEMX生成FatFS代码,操作SPI FLASH
STM32CUBEIDE之SPI读写FLASH进阶串行FLASH文件系统FatFs
3.1、CUBEMX使用FATFS读写SPI_FLASH

