
热门标签
热门文章
- 1机器学习实战:基于深度学习的道路交通流量预测_机器学习交通流量
- 2java毕业设计Keep健身俱乐部管理微信小程序开发[附源码]_keep运动小程序源码
- 3Open3D(C++) ICP算法实现点云精配准_icp c++
- 4yolov3(darknet )训练 - 测试 - 模型转换❤️darknet 转 ncnn 之C++运行推理❤️【yolov3 实战一览】_ncnn yolov3
- 5java毕业设计——基于JSP+access的网络故障管理平台设计与实现(毕业论文+程序源码)——网络故障管理平台_jsp acce
- 6proteus使用问题
- 7高级项目管理师/高项考试十大管理论文模板_软考高项基于一个主题的十大管理论文
- 8Unity 浮点数的精度问题
- 9测试质量保证体系浅谈_软件测试 质量保障体系
- 10网络设备安全配置与局域网攻击典型案例汇总_网络配置信息攻击
当前位置: article > 正文
MPU6050姿态解算——Mahony互补滤波_mahony互补滤波 kp和ki
作者:weixin_40725706 | 2024-05-14 09:54:11
赞
踩
mahony互补滤波 kp和ki
引入
DMP与互补滤波数据对比
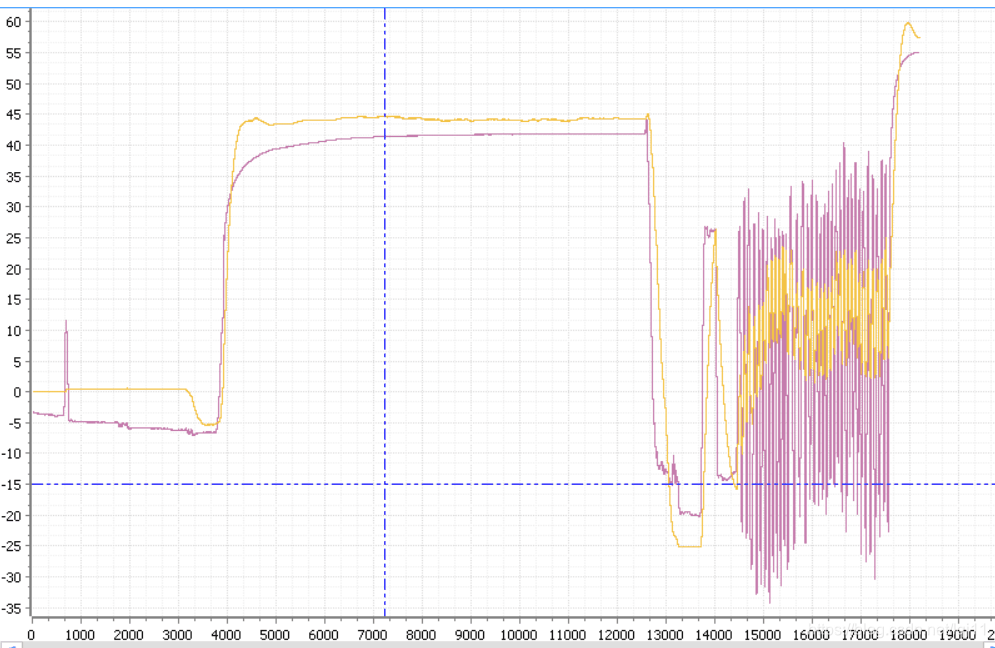
Long time no see,首先放一张图,黄色的是DMP获取的Pitch角数据,紫红色的是互补滤波解算的Pitch角数据(人为晃动陀螺仪增加了干扰)。
DMP与互补滤波的优缺点分析
| DMP | 互补滤波 |
|---|---|
| 不需要了解姿态解算知识,直接调用库函数,操作简单 | 需要掌握一定的姿态解算知识 |
| 解算速度慢,最大只能到200Hz | 速度快,而且随着单片机主频提高会更快 |
| 真实性差 | 真实性较好 |
从上面的曲线图结合我实际的干扰,在我大范围晃动陀螺仪的时候,DMP的角度变化还是很小,感觉是为了滤波而滤波,数据的真实性不可靠。而且在动态曲线观察的时候,互补滤波明显比DMP得到的的数据更快,时效性也
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/568280
推荐阅读

相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

