- 1全网最好玩的谷歌相机AGC8.4版本,体验70合一的拍照快感_谷歌相机70合1
- 2【吴恩达】ChatGPT提示工程师 笔记【第二课 Prompting 指南】_吴文达chatgpt prompt
- 3架构师权威指南-后端架构师技术图谱_vue 职级图谱
- 4二叉搜索树(查找、插入、删除的讲解实现+图文并茂)_二叉搜索树搜索
- 5华为端口安全常用3种方法配置案例_port-security protect-action
- 6多摄像头智能拼接解决方案,快速部署,实现无缝拼接
- 7学习VISIONPRO各控件的C#中类库--应用(CogImageFileTool,CogImageConvert,图片显示cogRecordDisplay)_visionpro cogimagefile
- 8Docker的一个简单例子(二)_最简单的docker案例
- 9uniapp 小程序支付 :微信支付,支付宝支付,抖音支付,百度支付_uni抖音支付
- 10【大学四年自学Java的学习路线】写了一个月,这是一份最适合普通大众、非科班的路线,祝你零基础快速找到一份满意的工作_网程好8353f5
ArduPilot H743 Dual BMI270 Mark4 四轴DIY简单功能验证_ardupilot 图传
赞
踩
ArduPilot H743 Dual BMI270 Mark4 四轴DIY简单功能验证
1. 源由
基于Mark4机架的Ardupilot DIY已经集成了不少功能,且基本上形成两种操作方式:
- FPV航模第一人称飞行,体验感受与Betaflight基本类似
- 采用Mission Planner或者QGC进行操控飞行,体验感受与无人机地面站软件操作类似
稍微欠缺的部分:
- 电传控制距离需要适当的优化(天线,模块发射功率/接收灵敏度,当前胶棒天线是2dBi)
- 挂载摄像头吊舱(Gimble),使用高清摄像头(卡录+图传)
- 障碍物规避(避障传感器的集成)
- 视频AI功能(Companion Computer应用):跟踪、识别、决策等
在进行后续工作之前,把之前整理的内容进行一些整理(打个基线),以此作为新的出发点。
2. 梳理
整个梳理从几个方面进行罗列,具体内容如有重复就不再展开,将会以整理+补充说明的方式给出内容。
2.1 基本配置
- 硬件适配方面:
- 软件配置方面:
a) ArduPilot开源代码之H743+BMI270x2+ChibiOS配置适配
b) ArduPilot之H743+BMI270x2+First Normal Takeoff
c) Ardupilot Aocoda-RC H743Dual
注:因为配置文件最终进行了UART序号的修改,请以b)链接给出的相关配置数据为准。
2.2 滤波配置
- Mark4机架振动方面:
ArduPilot飞控开源代码之滤波设置
注:该DIY的机架由于多次炸机,以及本身性能问题,存在一些特殊性(电机轴可能有稍许倾斜带来的振动),因此需要进行参数调优。
2.3 FPV-VTX配置
鉴于模拟图传诸多规格以及Ardupilot适配兼容的问题,需要妥善处理pandarc-VT5804ML1的功率表格。
2.4 FPV操控
- Anti-Gravity特性:
ArduPilot之H743快速加减油门抬头现象分析
注:猛推油门出现的四轴抬头/低头问题Betaflight处理的还是非常不错的,Ardupilot主要用于大型机,因此这块特性的支持并不是太好,不过好在4.4.0开始支持了。
- Rate参数设置:
这块内容因人而异大家可以根据自己的习惯进行设置。


- 油门设置:
这块内容与电机性能、电池性能、习惯都有关系。
笔者这里用的是3S旧电池,性能不怎么好,所以配置可能相对激进点。
MOT_THST_EXPO: 设置油门响应曲线
MOT_THST_HOVER: 设置悬停的油门大小

2.5 自适应PID调参
建议新机可以自动调参,但是如果炸过机的,本身也有各种问题的,还是手工调吧,否则效果不理想。
2.6 电传配置
关于电传前面已经用过一个 SnapAirUnit的工程样品,当然这块板子天线性能方面确实存在一定问题。
更换了433就好很多,尽管依然不够理想,主要存在以下问题:
- 天空端433MHz 发射功率100mW
- 接收/发射都采用了胶棒天线
说明下这块F743飞控的丝印可能存在一些问题,或者需要修改硬件适配文件。
3. 视频
3.1 FPV操控性
Ardupilot 4.4.0 beta3 RC EXPO 0.75 Rate 400 实在,油门还是有点肉 + 肥鲨眼镜断电瞬间
Ardupilot 4.4.0 beta3 THST EXPO 0.65 3S响应灵敏度有提升
3.2 路点巡航
Ardupilot 4.4.0 beta3 Mark4 + Mission Planner + 路点巡航
Mark4 ArduPilot + QGC 城北公园
3.3 救援模式
Mark4 ArduPilot RTL & Radio Fail Safe
4. 总结
鉴于分析了Betafligh的救援模式和iNav的意外经历,目前看Ardupilot还是相对来说远航会更加安全可靠。
【1】iNav开源代码之严重炸机 – 危险隐患
【2】Betaflight飞控之FAILSAFE机制
当然,后续也会去飞下山,让大家领略下飞山的感受,哈哈!
关于这个救援场景方面,也在研究中,希望后续能有更好改善和了解。
5. 参考资料
【1】 ArduPilot硬件AOCODARC H7DUAL配置文件讨论
【2】 ArduPilot开源代码之H743+BMI270x2+ChibiOS配置适配
【3】ArduPilot之H743+BMI270x2+First Normal Takeoff
【4】ArduPilot飞控开源代码之滤波设置
【5】ArduPilot之H743遗留配置问题解决
【6】 ArduPilot之H743快速加减油门抬头现象分析
【7】 ArduPilot之H743自动PID调节
【8】 ArduPilot之433电传模块集成之H7Dual飞控Rx/Tx丝印问题
【9】ArduPilot开源飞控系统之简单介绍
6. 补充说明–问题集中回答
有好多小伙盘也问我关于干扰的问题,其实这里面主要干扰是以下几个问题:
- 图传信号干扰(模拟尤为突出)
- GPS信号干扰
- 磁力计干扰
- 接收机干扰
- 电传干扰
关于我的模拟图传视频信号比较好的问题,我想大概率是和我的这根天线摆放是有关系的。主要是以下几个问题:
- 天线是比较长的,可以超过电池搞不(“死亡掉头”,信号不会遮挡);
- 通过支架固定,稍有一个角度,因为这种天线信号通常是一个绕天线的椭球(能发挥最大的信号发射效果);
关于磁力计的问题,那就是霍尔效应,要避开附近大电流器件(电机供电线、电池等),一般来说有支架的用在支架上,通常问题不大。
关于GPS信号的问题,请详细参阅:
【1】ArduPilot之GPS Glitch问题&M8N模块配置
【2】四轴飞控DIY Mark4 - 优化后续二
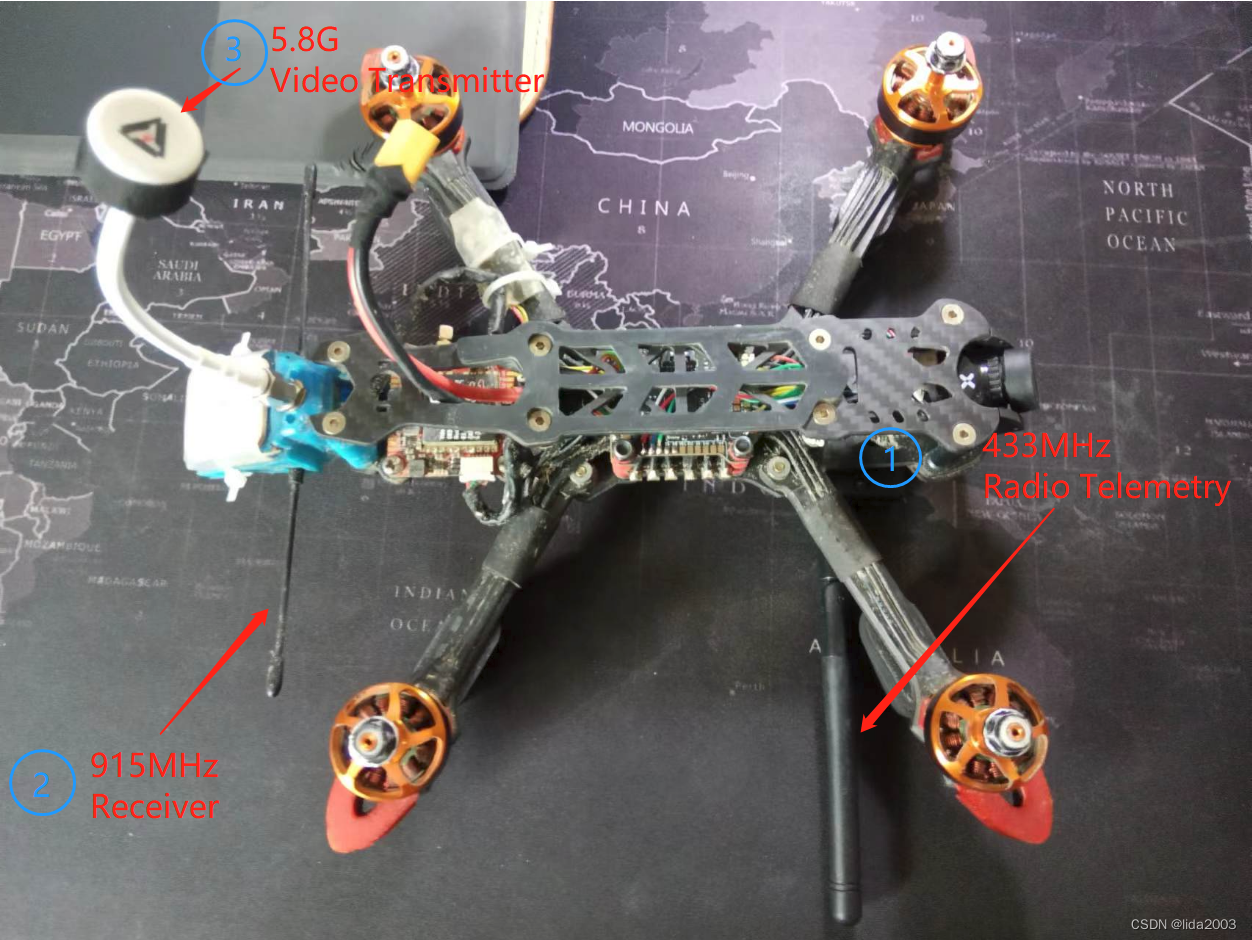
信号的频段尽量分开:
- 5.8G 视频信号
- 915MHz 遥控信号
- 433MHz 电传信号