
热门标签
热门文章
- 1【区块链-前端交互】第六篇:以太测试网转账和Gas计算_sepolia测试网怎么自动批量转账
- 2SEU东南大学电子夏令营暨预推免面经8.25
- 3【云原生】kubernetes中的认证、权限设置--RBAC授权原理分析与应用实战
- 4C#常用数据结构:数组,ArrayList,List<>,链表,Queue,Stack,Dictionary_c# queue快还是list快
- 5腾讯,干掉Redis项目,正式开源Tendis,太牛皮啦
- 6Linux篇:开发工具yum/vim/gcc/g++/Makefile/gdb_linux yum gcc10
- 7《计算机视觉》习题解答(三)第4章_计算机视觉教程第三版章毓晋答案
- 8axios学习笔记
- 9大数据技术Hadoop+Spark_hadoop+spark 入门
- 10系统集成项目管理工程师考试案例分析历年试题考点分布荟萃
当前位置: article > 正文
MATLAB与ROS联合仿真——发布ROS消息类功能模块介绍_matlab和ros联合仿真
作者:weixin_40725706 | 2024-06-03 05:52:01
赞
踩
matlab和ros联合仿真
1、Publish Ackermann Sport Information C
(1)输入参数:Speed为小车的运动速度(大于0前行,小于0后退),Angle为小车的舵机打角(弧度制,正数为左转,负数为右转)
(2)输出参数:无
(3)主要作用:作为ROS与MATLAB的通讯接口,将控制小车运动的电机速度Speed和舵机打角Angle发布至ROS,ROS中的小车通过订阅该信息就可以控制小车运动了
(4)内部结构:
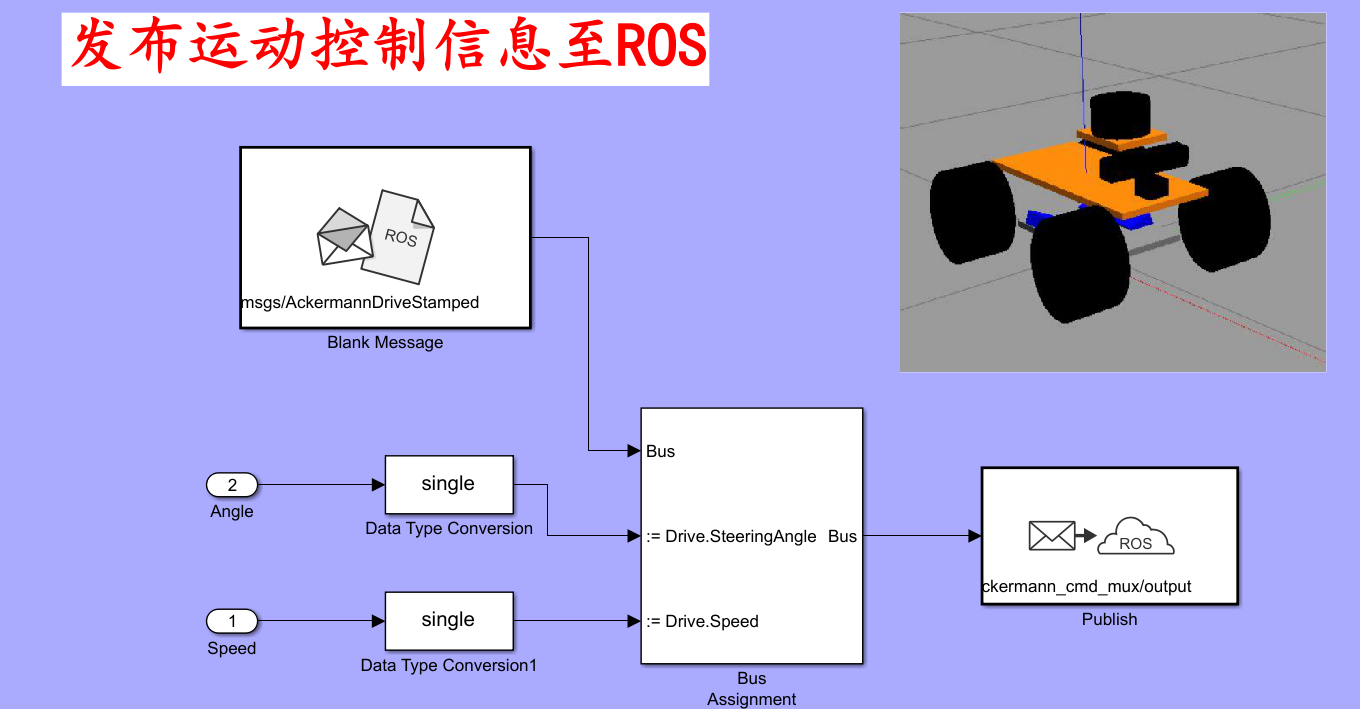
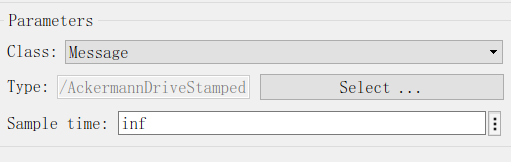
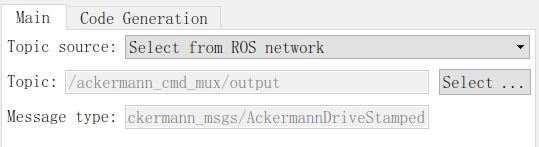
(5)具体实现过程:通过ROS工具箱中的Blank Message模块创建空白的消息,并选择消息类型为ackermann_msgs/AckermannDriveStamped
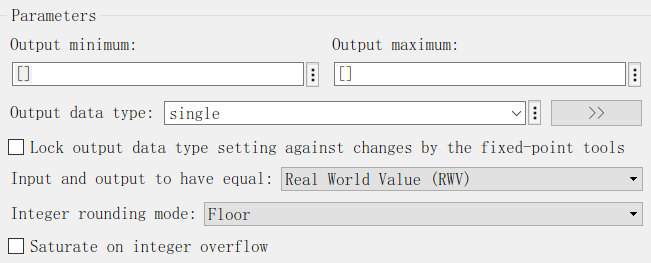
将输入的参数使用Data Type Conversion模块将其转换为single类型
使用Bus Assignment模块将创建的消息类型中的SteeringAngle和Speed重新赋值为我们要输出的值,即对应的Angle和Speed
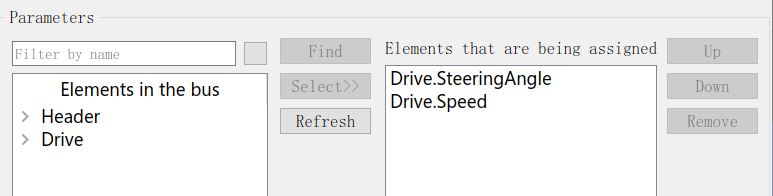
使用ROS工具箱中的Publish模块,将我们创建好的消息(已完成赋值),以话题/lackermann_cmd_mux/output的形式发布
(6)其他说明:无
2、Publish Target Point Information C
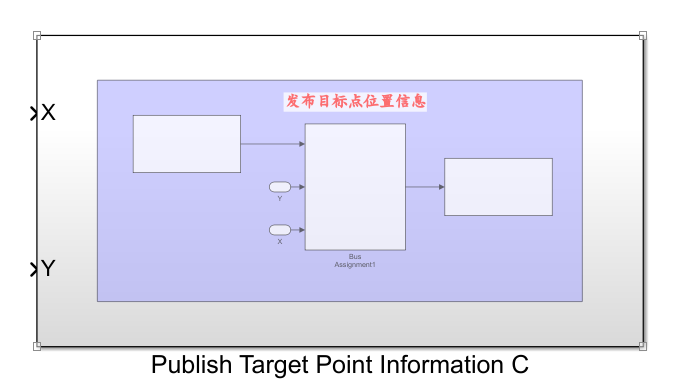
(1)输入参数:X和Y,是小车目标点的位置坐标
(2)输出参数:无
(3)主要作用:作为ROS与MATLAB的通讯接口,将期望的目标点的位置信息发布出去
(4)内部结构:
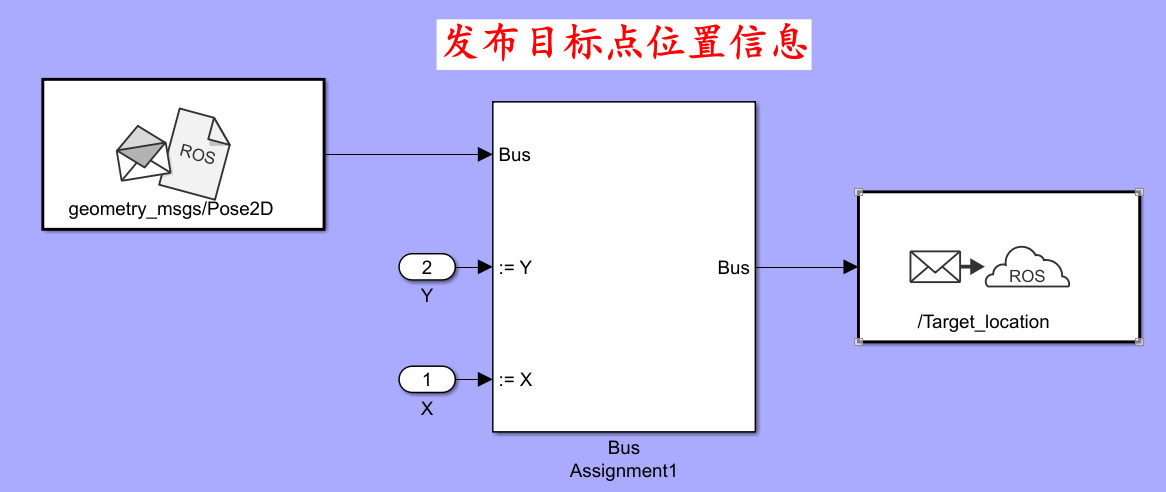
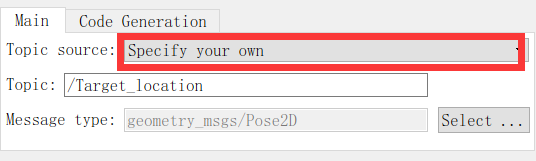
(5)具体实现过程:通过ROS工具箱中的Blank Message模块创建空白的消息,并选择消息类型为geometry_msgs/Pose2D

使用Bus Assignment模块将创建的消息类型中的X和Y重新赋值为我们要输出的值。

使用ROS工具箱中的Publish模块,将我们创建好的消息(已完成赋值),以自定义话题/Target_location的形式发布出去,这里的话题名是可以自己任意取的,但是为了与实验中其他模块对应起来,就不要用其他名字了
(6)其他说明: 无
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/665948
推荐阅读
相关标签

