
热门标签
热门文章
- 1ShardingSphere 5.0.0 实现按月水平分表_shardingsphere按月分表
- 2【Spark】RDD入门编程实践(完整版)_rddfffffrrrdfffdrdrrrrddrdd4rrrrdrrrrrddrdrdrr4drd
- 3docker安装大数据环境(centos 7)_docker 安装大数据
- 4LeetCode14. 最长公共前缀_leet code 14
- 5Sora背后的技术原理解析(简单易懂版本)_sora技术原理
- 6git撤回已推送远程的提交_git撤回push到远程的
- 7Mac自带apache+php环境配置_mac自带apache开启伪静态
- 8TCP头部详解
- 9中缀表达式转化为后缀表达式 头歌--12关_头歌十二关本关任务:输入一个中缀算术表达式,将其转换为后缀表达式。运算符包括+
- 10JAVA17---安装+配置环境变量 JAVA安装完整教学_java 17安装
当前位置: article > 正文
FreeRTOS学习笔记(一) —— 环境搭建_zynq平台freertos开发环境
作者:weixin_40725706 | 2024-06-30 00:15:45
赞
踩
zynq平台freertos开发环境
前言
在日常中,我平常都是直接裸机开发,去完成一些小玩意。直到最近,功能需求的不断增加,导致裸机开发的缺点就暴露出来了,中断内的处理变得复杂,处理时间变长,超级循环使得应用程序变得非常复杂,因此难以扩展、中断嵌套由于运行时长增加的原因,导致发生不可预估的问题等等…
为了解决以上痛点,我想到了FreeRTOS(一个开源的嵌入式实时操作系统),刚好ST官方的STM32CubeMX里面直接有FreeRTOS的中间件,使用非常方便。下来就来看看怎么搭建环境叭~
推荐去FreeRTOS官网学习相关API =>传送门.
CubeMx配置
MCU: STM32F103C8T6
CubeMX: STM32CubeMX 5.3.0
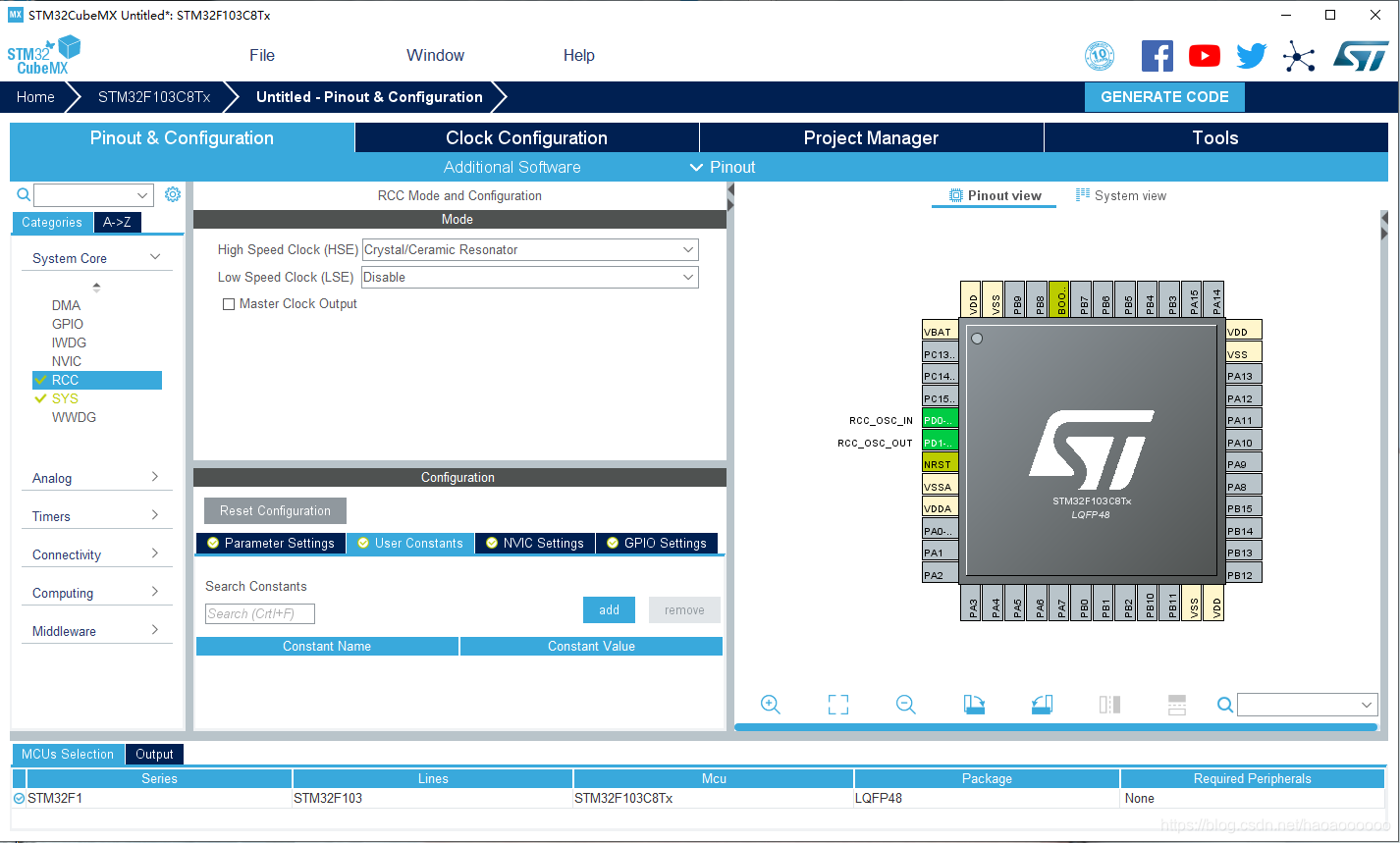
1.使能外部高速时钟源
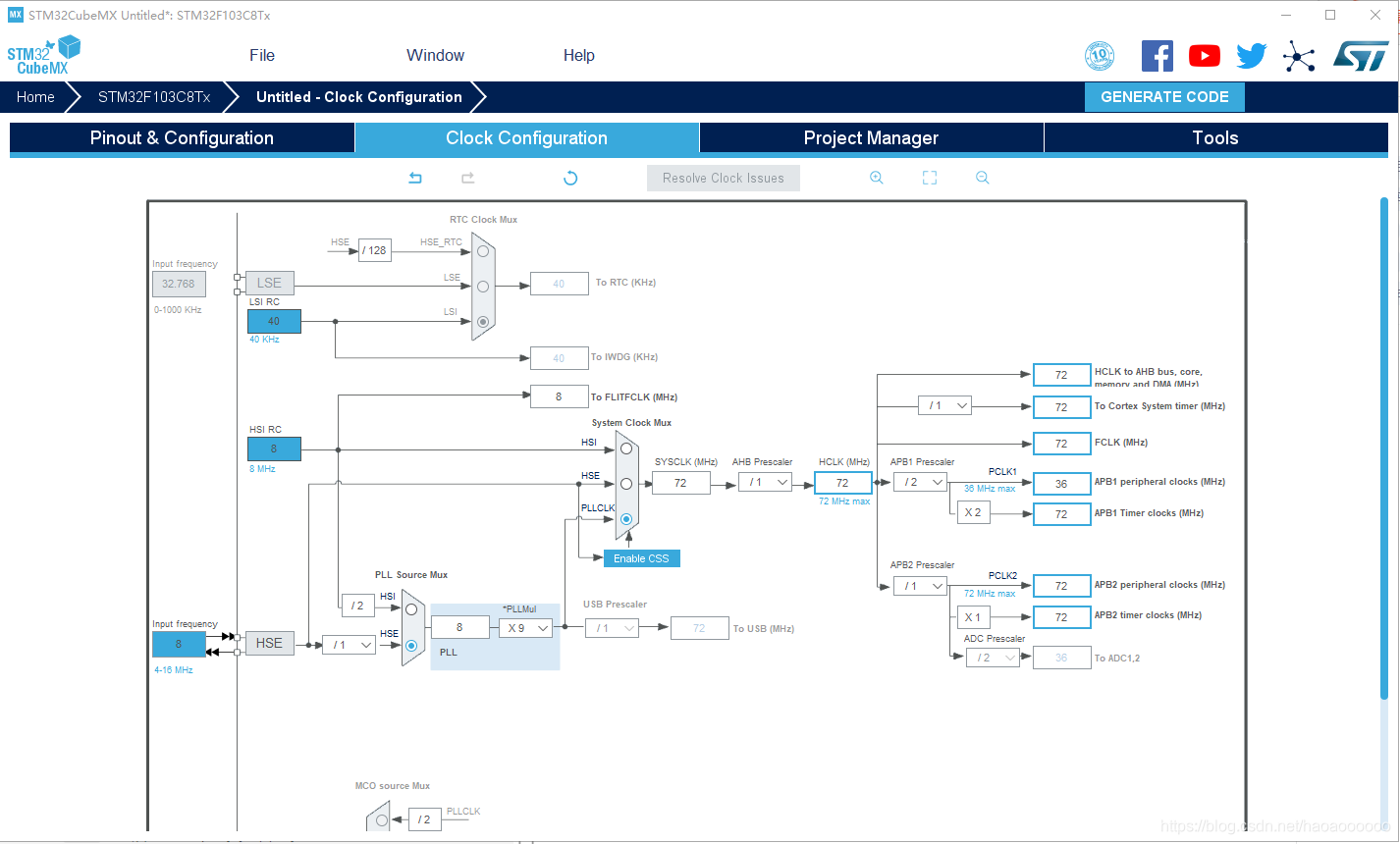
2.时钟树配置(直接最大频率)
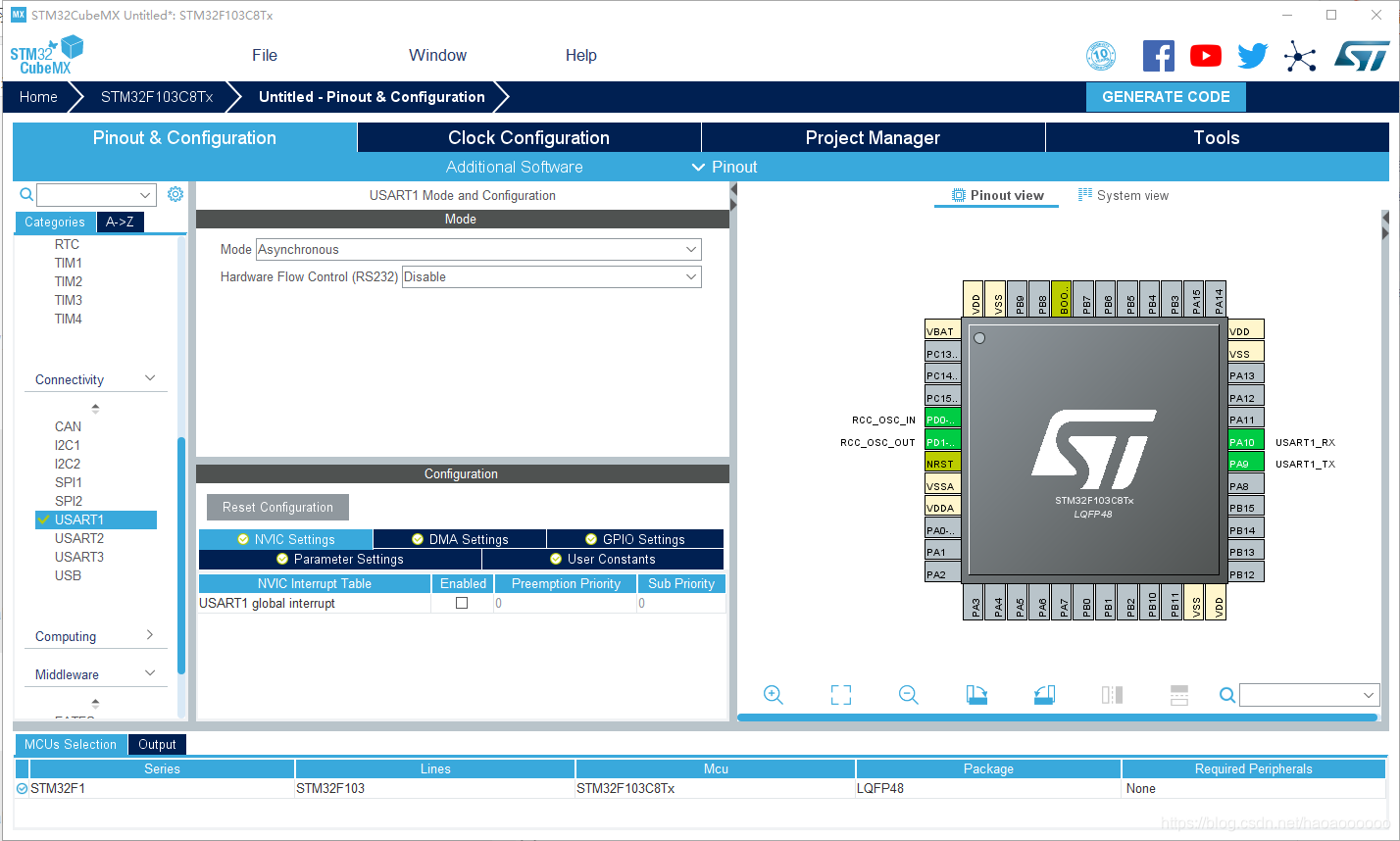
3.开启串口(用于调试)
4.开启今天的主角FreeRTOS
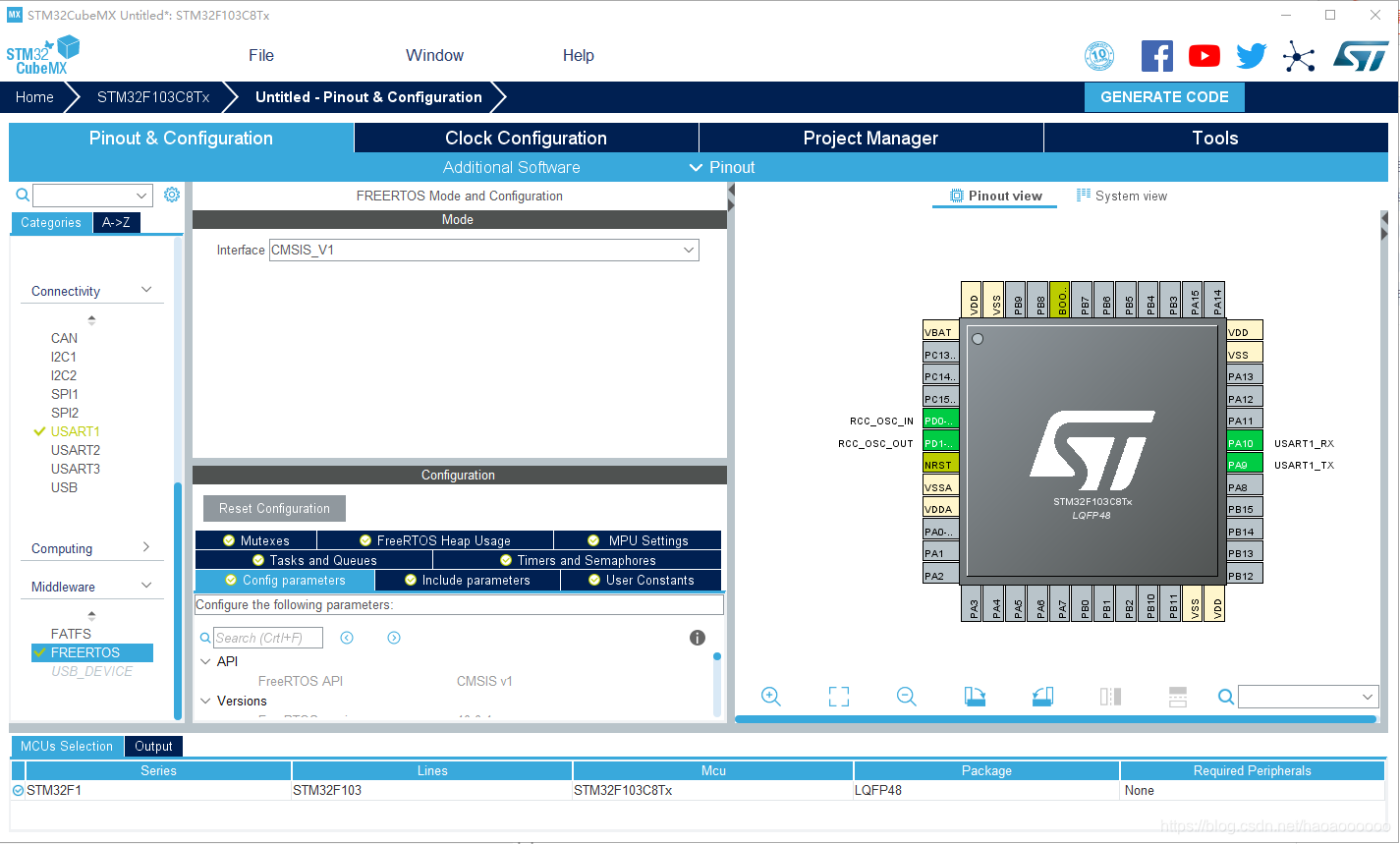
然后在Tasks and Queues选项中再添加一个Tasks,默认有一个,添加之后就是有两个了。Queues是消息队列,在FreeRTOS中是非常重要的功能,现在暂时用不到,后面再详谈。

5.填写项目名

配置项目生成单独的.c/.h文件
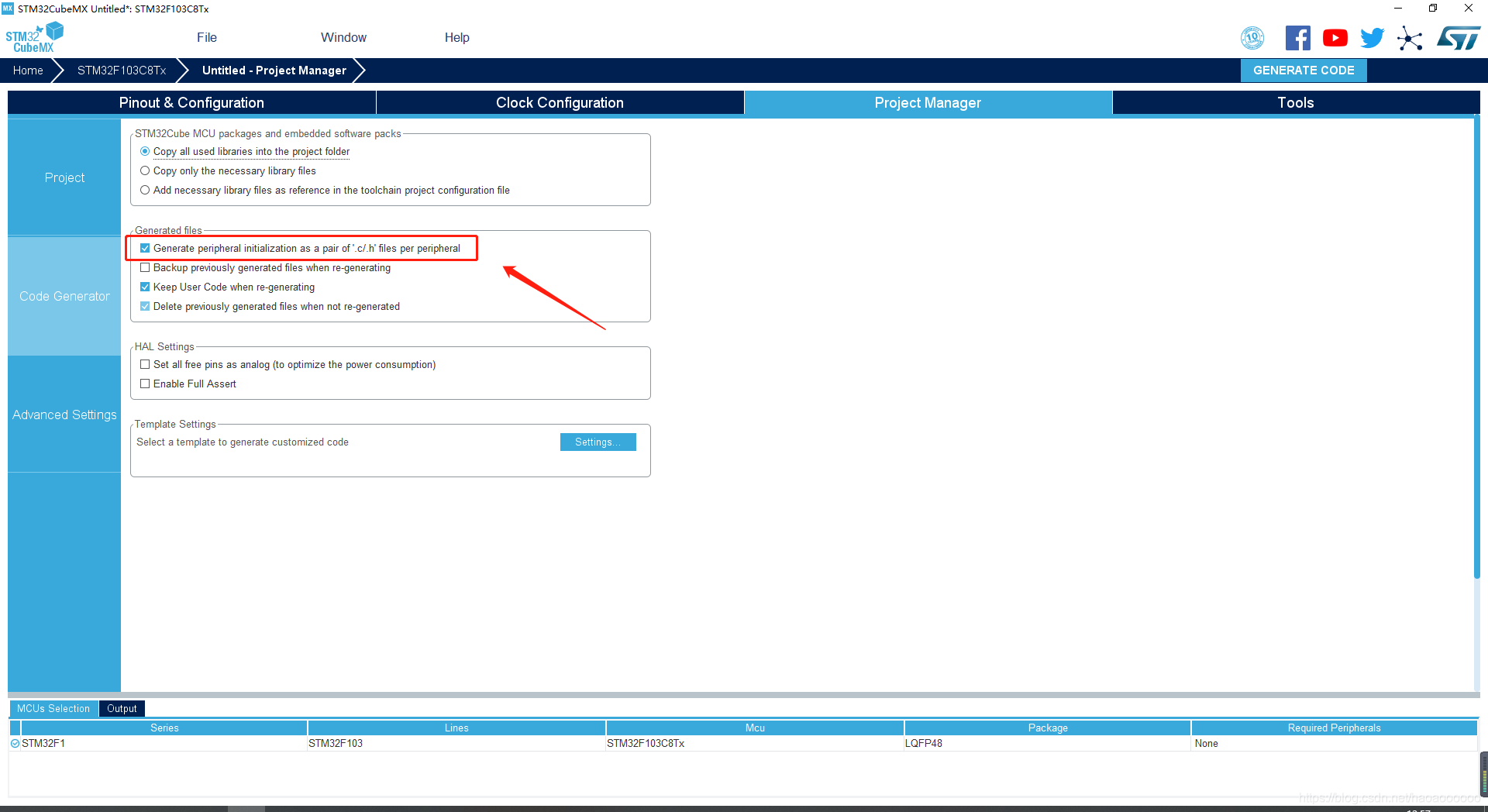
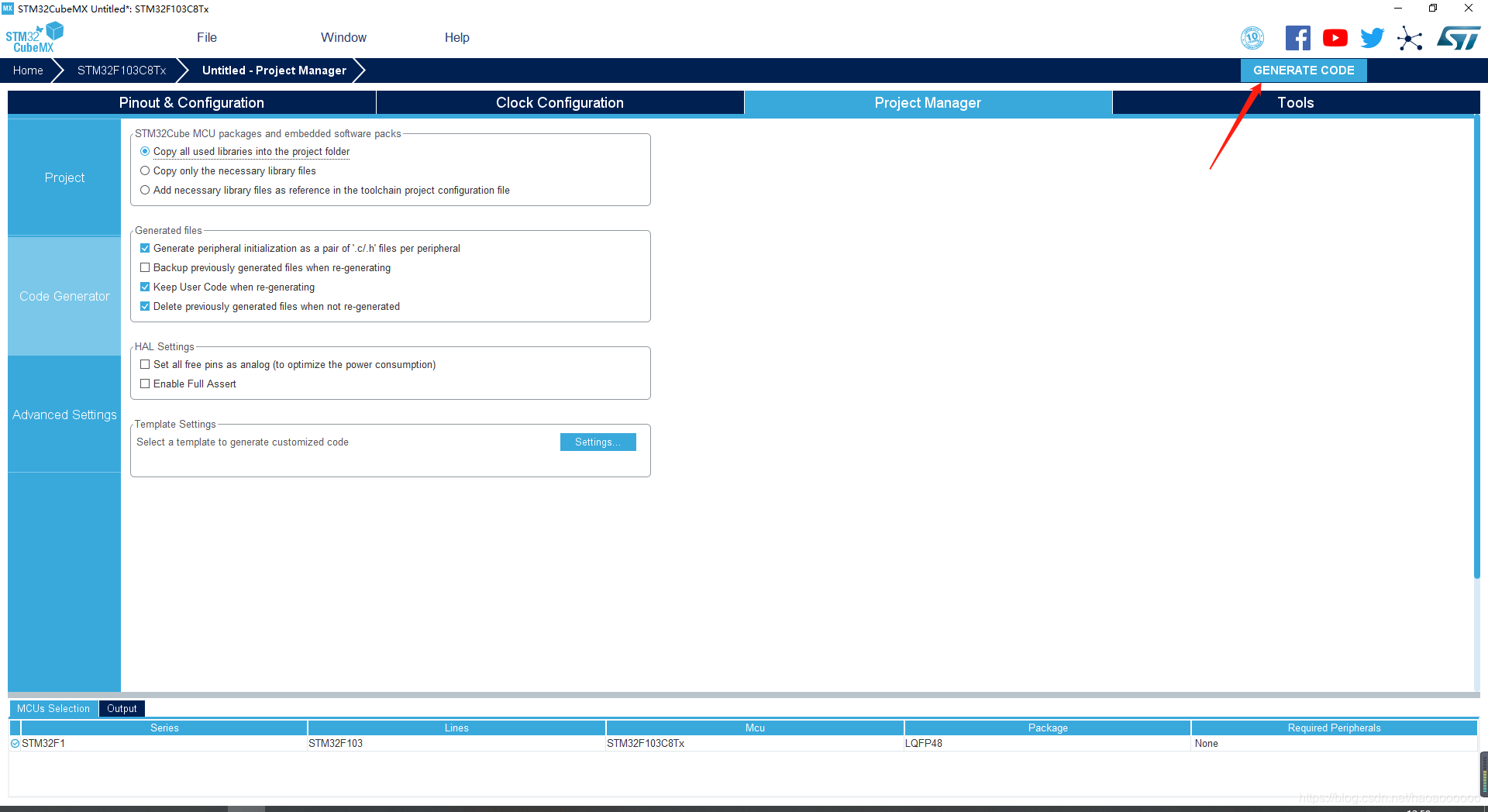
接着生成代码就ok了~ (点击后会出现警告,直接点yes即可)
修改工程文件
1.在usart.c文件下添加以下代码
/* USER CODE BEGIN 1 */ void Usart_SendString(uint8_t *str) { unsigned int k=0; do { HAL_UART_Transmit(&huart1,(uint8_t *)(str + k) ,1,1000); k++; } while(*(str + k)!='\0'); } //重定向c库函数printf到串口DEBUG_USART,重定向后可使用printf函数 int fputc(int ch, FILE *f) { /* 发送一个字节数据到串口DEBUG_USART */ HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 1000); return (ch); } //重定向c库函数scanf到串口DEBUG_USART,重写向后可使用scanf、getchar等函数 int fgetc(FILE *f) { int ch; HAL_UART_Receive(&huart1, (uint8_t *)&ch, 1, 1000); return (ch); } /* USER CODE END 1 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
然后记得加上头文件 include <stdio.h> 不然会有黄色感叹号
2.去到freertos.c编写测试代码
/* USER CODE BEGIN Header_StartDefaultTask */ /** * @brief Function implementing the defaultTask thread. * @param argument: Not used * @retval None */ /* USER CODE END Header_StartDefaultTask */ void StartDefaultTask(void const * argument) { /* USER CODE BEGIN StartDefaultTask */ /* Infinite loop */ for(;;) { printf("任务1\r\n"); osDelay(1); } /* USER CODE END StartDefaultTask */ } /* USER CODE BEGIN Header_StartTask02 */ /** * @brief Function implementing the myTask02 thread. * @param argument: Not used * @retval None */ /* USER CODE END Header_StartTask02 */ void StartTask02(void const * argument) { /* USER CODE BEGIN StartTask02 */ /* Infinite loop */ for(;;) { printf("任务2\r\n"); osDelay(1); } /* USER CODE END StartTask02 */ }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
编写完毕后,就可以烧写到板子上,然后用ttl转串口模块就可以看到效果了。
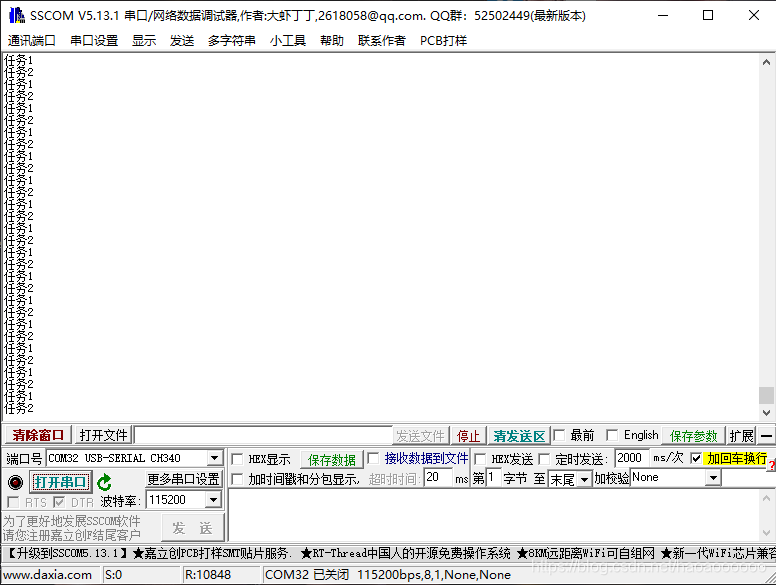
总结
根据上图很容易得知,在FreeRTOS下,同等优先级级别的Task,他们的执行顺序是从头开始,一直循环。
- 1
FreeRTOS最基本的环境到这里已经搭建完成了,关于FreeRTOS的内容还有很多,后续会补充~
以上内容记录下来,希望能帮助到有需要的伙伴。
该文章如有不对地地方,欢迎指出。
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

