
热门标签
热门文章
- 1最详细的idea项目上传到GitHub上_github上传代码 idea
- 2分布式锁浅析_阻塞锁和非阻塞锁
- 3cs224w 图神经网络 学习笔记(十四)Influence Maximization in Networks_影响力传播模型和图神经网络
- 4AI系列:用Python streamlit实现简单的AI 大模型对话对比器_streamlit 大模型
- 5图文教程 | 2024年IDEA安装使用、破解教程,JDK简易下载方法_idea 2024
- 6一种基于JMeter的接口自动化测试方法
- 7用Python作图形界面GUI,这几个库可以满足你所有要求!_python 界面库
- 82023HW红队作战工具
- 9新人报道啊
- 10数字图像处理 使用顶帽变换进行阴影校正_阴影补正
当前位置: article > 正文
【LLM】RLHF机制(Reinforcement Learning from Human Feedback)
作者:一键难忘520 | 2024-07-08 18:06:57
赞
踩
rlhf
一、RLHF机制
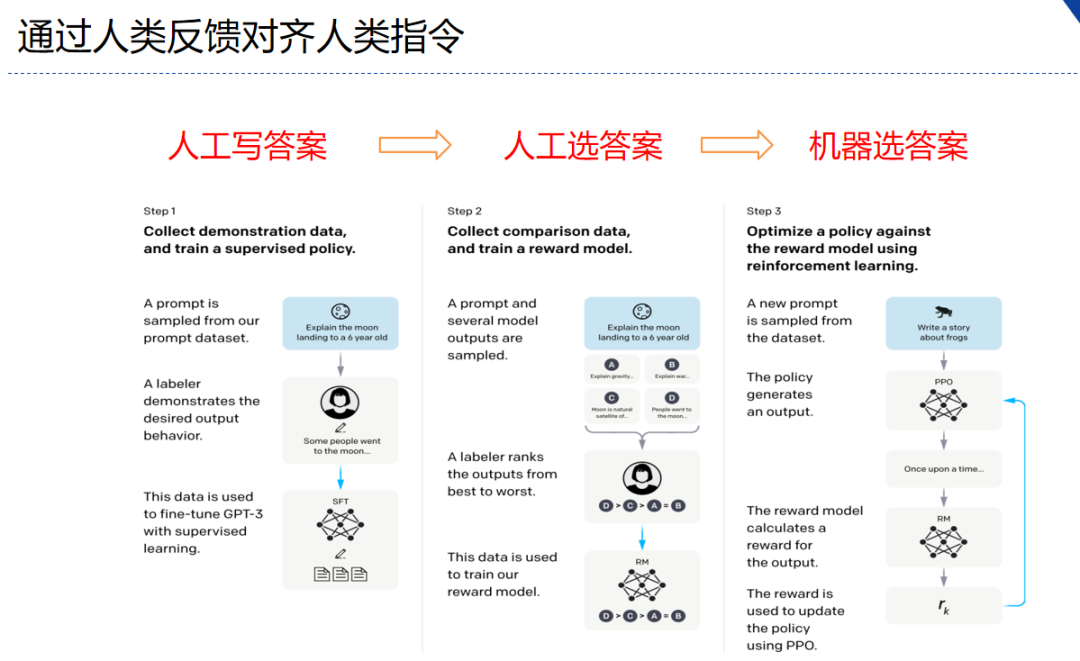
- 分为三个步骤
- 我做你看:有监督学习,从训练集中挑出一批prompt,人工对prompt写答案
- 你做我看:奖励模型训练,这次不人工写答案了,而是让GPT3给出几个候选答案,人工对其质量排序,Reward model学习一个打分器;这个让机器学习人类偏好的过程就是【对齐】,但可能会导致胡说八道,可以通过KL Divergence等方法解决。instructGPT中奖励模型的损失函数如下,其中 rθ(x,y) 是奖励模型对提示x和完成y的标量输出,具有参数θ,
y
w
y_w
yw是
y
w
y_w
yw和
y
l
y_l
yl中更受欢迎的补全,D是人类比较的数据集。
loss
(
θ
)
=
−
1
(
K
2
)
E
(
x
,
y
w
,
y
l
)
∼
D
[
log
(
σ
(
r
θ
(
x
,
y
w
)
−
r
θ
(
x
,
y
l
)
)
)
]
\operatorname{loss}(\theta)=-\frac{1}{\left(\right)} E_{\left(x, y_w, y_l\right) \sim D}\left[\log \left(\sigma\left(r_\theta\left(x, y_w\right)-r_\theta\left(x, y_l\right)\right)\right)\right] loss(θ)=−(K2)1E(x,yw,yl)∼D[log(σ(rθ(x,yw)−rθ(x,yl)))]
K2 - 自学成才:PPO训练,利用第二阶段的打分器,RL对大量训练数据训练,PPO最大优化该目标函数:
objective
(
ϕ
)
=
E
(
x
,
y
)
∼
D
π
ϕ
R
L
[
r
θ
(
x
,
y
)
−
β
log
(
π
ϕ
R
L
(
y
∣
x
)
/
π
S
F
T
(
y
∣
x
)
)
]
+
γ
E
x
∼
D
pretrain
[
log
(
π
ϕ
R
L
(
x
)
)
]
objective (ϕ)=E(x,y)∼DπϕRL[rθ(x,y)−βlog(πϕRL(y∣x)/πSFT(y∣x))]+γEx∼Dpretrain [log(πϕRL(x))]
objective (ϕ)=E(x,y)∼DπRLϕ[rθ(x,y)−βlog(πRLϕ(y∣x)/πSFT(y∣x))]+γEx∼Dpretrain [log(πRLϕ(x))] - π φ R L π^{RL}_φ πφRL是学习到的RL策略,
- π S F T π^{SFT} πSFT是监督训练模型,
- D p r e t r a i n D_pretrain Dpretrain 是预训练分布。
- KL奖励系数β和预训练损失系数γ分别控制KL惩罚和预训练梯度的强度。对于“PPO”模型,γ 设为 0。除非另有说明,否则本文中InstructGPT指 PPO-ptx模型

二、PPO模型(近端策略优化)
- 思想:保证策略改进同时,通过一些约束来控制策略更新的幅度;在每次迭代中,通过采样多个轨迹数据来更新策略:
- 使用当前策略对环境交互,收集多个轨迹数据
- 利用第一步的轨迹数据计算当前策略和旧策略之间的KL散度,通过控制KL散度大小来限制策略更新的幅度
- 使用优化器对策略进行更新,使其更加接近当前的样本策略
- KL散度(Kullback-Leibler Divergence),可以衡量两个概率分布之间的差异程度。在 PPO 算法中,KL 散度(Kullback-Leibler Divergence)的计算公式如下:
K L ( π o l d ∣ ∣ π n e w ) = ∑ i π o l d ( i ) l o g ( π o l d ( i ) / π n e w ( i ) ) KL(π_old || π_new) = ∑i π_old(i) log(π_old(i) / π_new(i)) KL(πold∣∣πnew)=∑iπold(i)log(πold(i)/πnew(i))- 其中,π_old 表示旧的策略,π_new 表示当前的样本策略。KL 散度的含义是用 π_old 的分布对 π_new 的分布进行加权,然后计算两个分布之间的差异程度。
- 具体来说,KL 散度的计算方法是首先计算 π_old(i) / π_new(i) 的比值,然后对其取对数并乘以 π_old(i) 来进行加权。最后将所有加权后的结果相加,即可得到 KL 散度的值。
注意:KL 散度是一个非对称的度量,即 KL(π_old || π_new) 与 KL(π_new || π_old) 的值可能不相等。在 PPO 算法中,我们通常使用 KL(π_old || π_new) 来控制策略更新的幅度,因为 KL(π_old || π_new) 的值通常比 KL(π_new || π_old) 更容易控制,并且更能够反映出策略改变的方向。
Reference
[1] 强化学习极简入门:通俗理解MDP、DP MC TC和Q学习、策略梯度、PPO
[2] “StackLLaMA”: 用 RLHF 训练 LLaMA 的手把手教程.huggingface
[3] ChatGPT的RLHF:AI时代的“调速器”,让AI真正可用的关键
[4] 【他山之石】如何正确复现 Instruct GPT / RLHF?
[5] https://en.wikipedia.org/wiki/Reinforcement_learning_from_human_feedback
[6] RLHF中的PPO算法原理及其实现.王嘉宁
[7] Training language models to follow instructions with human feedback(2022)
[8] InstructGPT论文解读.李响
[9] ChatGPT训练三阶段与RLHF的威力.oneflow
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/一键难忘520/article/detail/799662
推荐阅读
相关标签

