
热门标签
热门文章
- 1python第八章可视化课后作业_第八章课后作业(评测版)
- 2AD7606 + STM32F407VET6_ad7606和stm32f407开发板
- 3香橙派python编程_香橙派Orange Pi 4开发板在Ubuntu系统下使用python 控制GPIO
- 4使用Spring MVC生成Excel文件_spring 生成excel
- 5本地eureka启动报错_本地启动eureka失败
- 6智慧校园解决方案_高等学校智慧校园建设
- 7 大规模旅行商问题解决方案(基于分层规划,整数规划) ...
- 8总结!AI Agent开发的常见方法
- 9[渝粤教育] 中国地质大学 机械原理 复习题_单选对于转速较高的凸轮机构为了减小冲击和振动从动件运动规律最好采用()运动规律
- 10Hive引擎MR、Tez、Spark_tez spark
当前位置: article > 正文
python之建模规划篇_linprog python
作者:一键难忘520 | 2024-07-18 07:11:42
赞
踩
linprog python
一.线性规划
线性规划求解需清晰两部分,目标函数(max,min)和约束条件(s.t.),求解前应转化为标准形式:

举例:求解下列动态规划问题

1.MatLab求解:
[x,fval]=linprog(c,A,b,Aeq,beq,LB,UB,X0,OPTIONS)
- 1
LB和UB分别为x的上界和下界
===============================================================================================
2. scipy库求解:
from scipy import optimize
import nunmpy as np
# 求解函数
res=optimize.linprog(c,A,b,Aeq,beq,LB,UB,X0,OPTIONS)
#目标函数最小值
print(res.fun)
#最优解
print(res.x)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
Python代码如下:

输出的结果:
con: array([1.80713489e-09])
fun: -14.571428565645059
message: 'Optimization terminated successfully.'
nit: 5
slack: array([-2.24614993e-10, 3.85714286e+00])
status: 0
success: True
x: array([6.42857143e+00, 5.71428571e-01, 2.35900788e-10])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
结果这样看:
1.fun: 最值
2.x: 最优解
注意事项:
1.符号要一致,对于这个问题做了以下调整:
2X1-5X2+X3>=10 => -2X1=5X2-X3<=-10
2.最大值,最小值要看清:
默认求最小值,所以求得最大值时要加 “-”
3.pulp库求解:
Python代码如下:

二.整数规划
1.整数规划的模型与线性规划基本相同,只是额外增加了部分变量为整数的约束。
2.整数规划求解的基本框架是分支定界法,首先去除整数约束得到“松弛模型”,使用线性规划的方法求解。
3.若有某个变量不是整数,在松弛模型上分别添加约束:x<floor(A)和x ≥ceil(A),然后再分别求解,这个过程叫做分支。当节点求解结果中所有变量都是整数时,停止分支。这样不断迭代,形成了一颗树。所谓定界,指的是叶子节点产生后,相当于给问题定了一个下界。之后在求解过程中一旦某个节点的目标函数值小于这个下界,那就直接pass,不再进行分支了;每次新产生叶子节点,则更新下界。
1.分支定界代码:
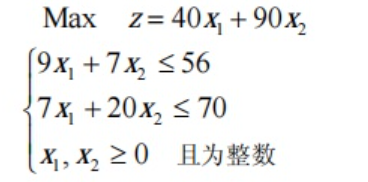
from scipy.optimize import linprog import numpy as np import math import sys from queue import Queue class ILP(): def __init__(self, c, A_ub, b_ub, A_eq, b_eq, bounds): # 全局参数 self.LOWER_BOUND=-sys.maxsize self.UPPER_BOUND = sys.maxsize self.opt_val = None self.opt_x = None self.Q = Queue() # 这些参数在每轮计算中都不会改变,因为求最大值所以c=-c self.c = -c self.A_eq = A_eq self.b_eq = b_eq self.bounds = bounds # 首先计算一下初始问题 r = linprog(-c, A_ub, b_ub, A_eq, b_eq, bounds) # 若最初问题线性不可解 if not r.success: raise ValueError('Not a feasible problem!') # 将解和约束参数放入队列 self.Q.put((r, A_ub, b_ub)) def solve(self): while not self.Q.empty(): # 取出当前问题 res, A_ub, b_ub = self.Q.get(block=False) # 当前最优值小于总下界,则排除此区域 if -res.fun < self.LOWER_BOUND: continue # 若结果 x 中全为整数,则尝试更新全局下界、全局最优值和最优解 if all(list(map(lambda f: f.is_integer(), res.x))): if self.LOWER_BOUND < -res.fun: self.LOWER_BOUND = -res.fun if self.opt_val is None or self.opt_val < -res.fun: self.opt_val = -res.fun self.opt_x = res.x continue # 进行分枝 else: # 寻找 x 中第一个不是整数的,取其下标 idx idx = 0 for i, x in enumerate(res.x): if not x.is_integer(): break idx += 1 # 构建新的约束条件(分割 new_con1 = np.zeros(A_ub.shape[1]) #返回长度为2的一维数组[0,0] new_con1[idx] = -1 #此时new_con1=[-1,0] new_con2 = np.zeros(A_ub.shape[1]) #返回长度为2的一维数组[0,0] new_con2[idx] = 1 #此时new_con2=[1,0] #添入新的约束条件,此时new_A_ub_1=[[ 9 7][ 7 20][-1 0]],不懂的可以参照numpy的insert函数用法 new_A_ub1 = np.insert(A_ub, A_ub.shape[0], new_con1, axis=0) # 添入新的约束条件,此时new_A_ub_2=[[ 9 7][ 7 20][1 0]] new_A_ub2 = np.insert(A_ub, A_ub.shape[0], new_con2, axis=0) #此时new_b_ub1=[[56,70],[-5,0]] new_b_ub1 = np.insert( b_ub, b_ub.shape[0], -math.ceil(res.x[idx]), axis=0) # 此时new_b_ub2=[[56,70],[4,0]] new_b_ub2 = np.insert( b_ub, b_ub.shape[0], math.floor(res.x[idx]), axis=0) # 将新约束条件加入队列,先加最优值大的那一支 r1 = linprog(self.c, new_A_ub1, new_b_ub1, self.A_eq, self.b_eq, self.bounds) r2 = linprog(self.c, new_A_ub2, new_b_ub2, self.A_eq, self.b_eq, self.bounds) if not r1.success and r2.success: self.Q.put((r2, new_A_ub2, new_b_ub2)) elif not r2.success and r1.success: self.Q.put((r1, new_A_ub1, new_b_ub1)) elif r1.success and r2.success: if -r1.fun > -r2.fun: self.Q.put((r1, new_A_ub1, new_b_ub1)) self.Q.put((r2, new_A_ub2, new_b_ub2)) else: self.Q.put((r2, new_A_ub2, new_b_ub2)) self.Q.put((r1, new_A_ub1, new_b_ub1)) def test1(): """ 此测试的真实,最优值为340,最优解为 [4, 2] """ c = np.array([40, 90]) A = np.array([[9, 7], [7, 20]]) b = np.array([56, 70]) Aeq = None beq = None bounds = [(0, None), (0, None)] solver = ILP(c, A, b, Aeq, beq, bounds) solver.solve() print("Test 1's result:", solver.opt_val, solver.opt_x) print("Test 1's true optimal x: [4, 2]\n") if __name__ == '__main__': test1()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
摘选自知乎:https://zhuanlan.zhihu.com/p/386049272
2.非线性规划:
(1).非线性规划可以简单分两种,目标函数为凸函数or非凸函数 (2).凸函数的非线性规划,比如fun = x2+y+xy,有很多常用库完成,比如cvxpy (3).非凸函数的非线性规划(求极值),可以尝试以下方法: 纯数学方法,求导求极值 (3).神经网络、深度学习(反向传播算法中链式求导过程) (4).scipy.optimize.minimize (minimize局部最优)
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

