
- 1完全背包问题-动态规划_动态规划 全背包问题。有n种重量和价值分别为wi、vi(1≤i≤n)的物品,
- 2Parallels Desktop 19 for Mac 发布, 简化 macOS 和 Windows 交互_parallels desktop 19 百度云
- 3时序数据处理模型:RNN与LSTM总结_处理时序 信息的网络模型
- 4顺序表的操作例题——已知一个顺序表L, 其中的元素递增有序排列,设计一个算法,插入一个元素x (x为int 后保持该顺序表仍然递增有序排列(假设插入操作总能成功)。_设计一个算法,判断顺序表l中所有元素是否是递增有序的。
- 5结构体链表 (创建)_结构体链表的创建
- 6【人工智能 | 知识表示方法】状态空间法 & 语义网络,良好的知识表示是解题的关键!(笔记总结系列)_状态空间法总结
- 7阿里P7架构师开源分享2023最新897道java面试题答案
- 8el-tree饿了么elementUI tree树结构插件设置全部展开折叠_饿了么ui树形组件
- 9时间频度,时间复杂度的计算
- 10ffmpeg和ImageMagick使用_failedtoexecutecommand `"gswin64c.exe
Matlab代码实现改进后的A*路径规划算法,提升搜索效率,冗余拐角优化,路径平滑处理_a*改进matlab
赞
踩
Matlab算法代码 A星算法
路径规划A*/Astar算法仿真
传统A*+改进后的A*算法 Matlab代码
改进:
①提升搜索效率(引入权重系数)
②冗余拐角优化(可显示拐角优化次数)
③路径平滑处理(引入梯度下降算法配合S-G滤波器)
ID:2166692412070716
夹竹丶桃
标题:改进的A*算法在路径规划中的应用
摘要:本文将介绍改进的A*算法在路径规划中的应用,通过引入权重系数、优化冗余拐角和路径平滑处理来提高搜索效率和路径质量。具体内容包括算法原理、改进策略以及在Matlab中的实现。
-
引言
路径规划是许多领域中的一个重要问题,它在无人驾驶、机器人导航和游戏开发等领域具有广泛的应用。A算法是一种经典的路径规划算法,但在实际应用中存在一些不足之处。本文将介绍基于Matlab的改进A算法,通过引入权重系数、优化冗余拐角和路径平滑处理来提高算法的搜索效率和路径质量。 -
A算法原理
A算法是一种启发式搜索算法,它通过综合考虑路径代价和启发式函数来评估节点的优先级,从而选择最优路径。具体而言,A*算法通过维护一个开放列表和一个关闭列表,通过不断扩展优先级最高的节点,直到找到目标节点或者无法找到路径为止。 -
改进策略
① 引入权重系数:在传统的A*算法中,路径代价和启发式函数的权重通常是相同的,但在实际应用中,我们可能更希望一些因素比其他因素更重要。于是,我们引入权重系数,通过调整不同因素的权重来提高搜索效率和路径质量。
② 优化冗余拐角:在传统A*算法中,可能存在一些冗余拐角,即路径中连续的转弯。这些冗余拐角可能导致路径的不平滑和长度的增加。为了优化路径的质量,我们引入冗余拐角优化策略,通过限制连续转弯的次数来减少冗余拐角的数量。
③ 路径平滑处理:传统A*算法得到的路径可能存在抖动或者不平滑的问题,为了解决这一问题,我们引入梯度下降算法和S-G滤波器,通过迭代优化路径,使其更加平滑。
-
算法实现
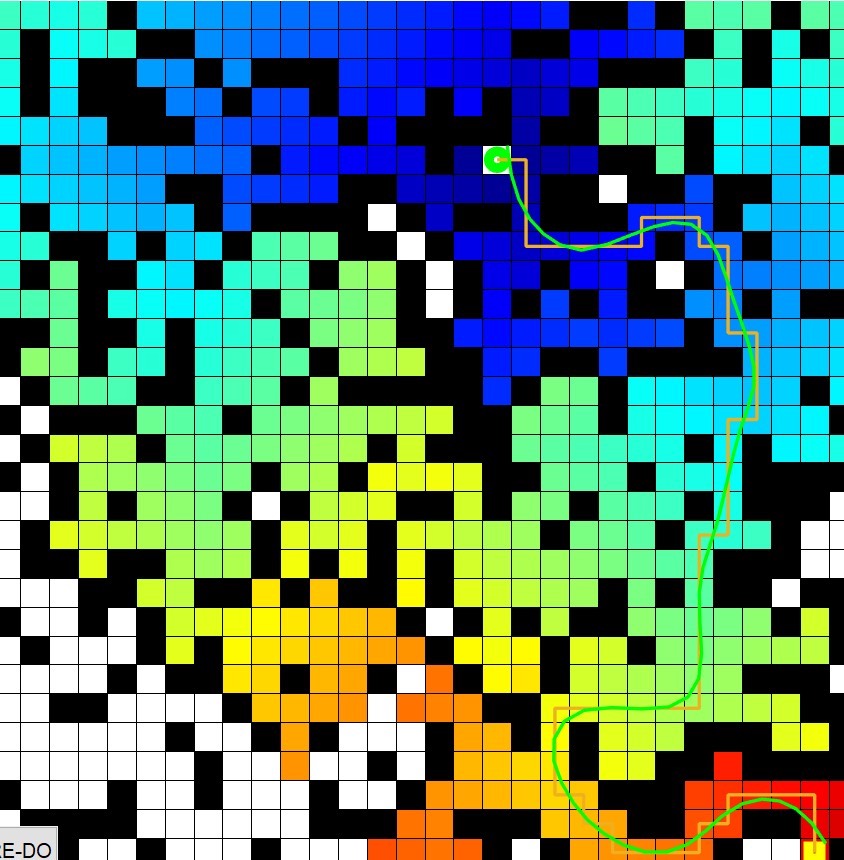
本文在Matlab环境下实现了改进的A*算法。具体实现过程包括定义地图网格、起始点和目标点,计算节点的优先级,扩展节点,并更新节点的代价和路径等。通过Matlab的图形界面,可以直观地展示路径规划的过程和结果。 -
实验结果与分析
本文通过对比传统A算法和改进后的A算法在不同场景下的路径规划结果,分析了改进算法的性能优势。实验结果表明,改进的A*算法在搜索效率和路径质量上都有较大的提升。 -
结论
本文介绍了改进的A算法在路径规划中的应用,通过引入权重系数、优化冗余拐角和路径平滑处理来提高搜索效率和路径质量。实验结果表明,改进的A算法在实际应用中具有较好的性能表现,可以为路径规划问题提供有效的解决方案。
参考文献(不提供)
【相关代码 程序地址】: http://nodep.cn/692412070716.html

