
热门标签
热门文章
- 110 Hadoop的安全模式及权限介绍
- 22023年5月青少年软件编程等级考试(C语言)一级试卷及C语言版答案_青少年 一级c 考试
- 3windows下的win+ 快捷键_windows+下
- 4android反编译-修改别人apk(如何无视R文件,使用新增布局xml drawable等)_android studio反编译
- 5linux简单命令_finalshell命令大全
- 6人工智能-基础篇04篇-人工智能中名词LLM、NLP和GLM介绍_glm llm
- 7PHP在线客服系统IM即时通讯聊天源码_辰光客服系统源码
- 8windwos10搭建我的世界服务器,并通过内网穿透实现联机游戏Minecraft_windows server mc服务器
- 9Linux内核源码list.h解读_config_debug_list
- 10关机时没有退出clash代理,导致重启后浏览器无法访问网页
当前位置: article > 正文
使用NDT点云配准实现重定位_ros中实现icp和ndt重定位
作者:不正经 | 2024-02-19 20:44:00
赞
踩
ros中实现icp和ndt重定位
代码参考:
http://github.com/AbangLZU/ndt_localizer
数据集使用的是github中提到的KAIST02-small.bag
- cd catkin_ws/src/
- git clone https://github.com/AbangLZU/ndt_localizer.git
- cd ..
- catkin_make
- # open a roscore
- roscore
- # in other terminal
- cd catkin_ws
- source devel/setup.bash
- # use rosbag sim time if you are playing a rosbag!!!
- rosparam set use_sim_time true
- # launch the ndt_localizer node
- roslaunch ndt_localizer ndt_localizer.launch
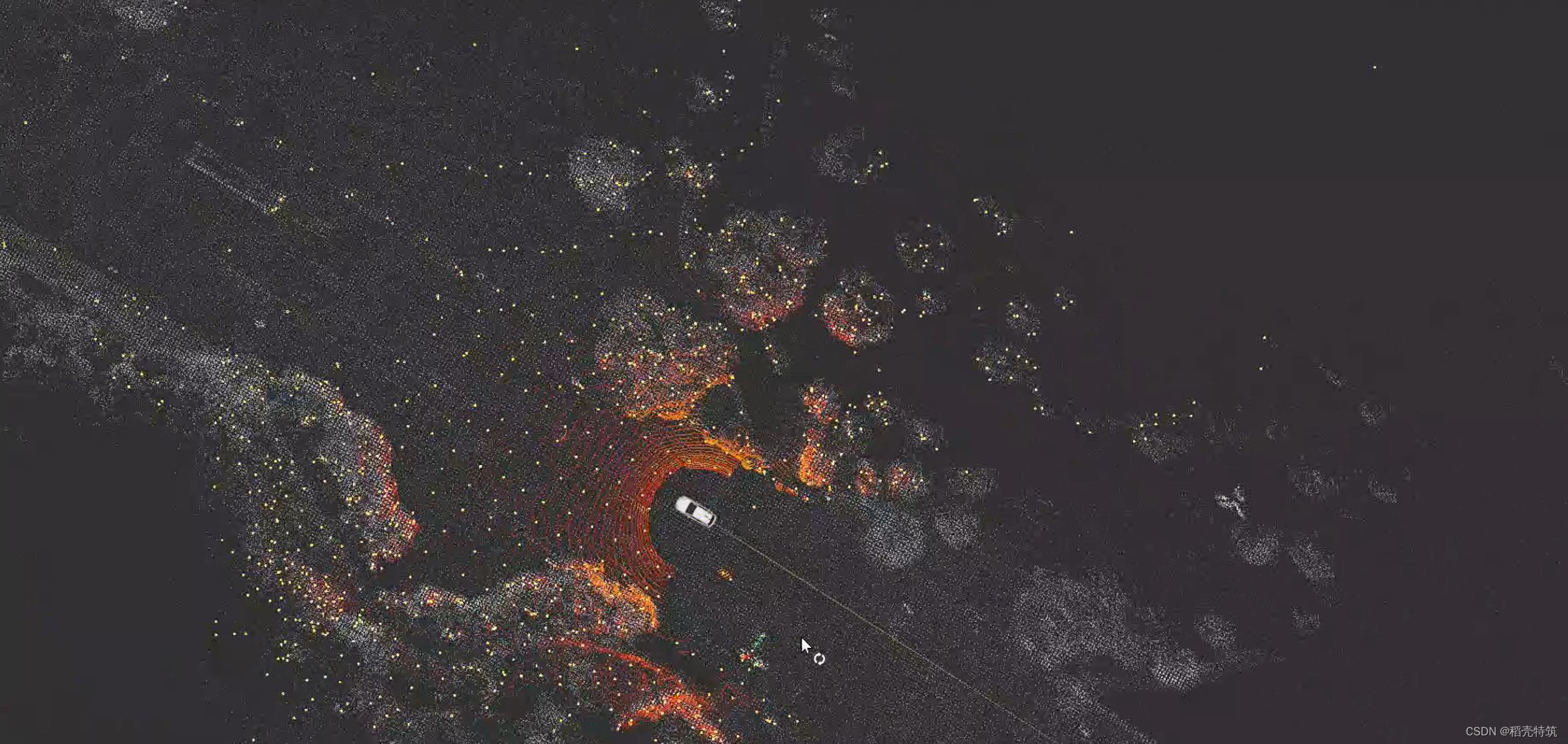
当地图加载成功之后 最重要的一步是在rviz中选择2D Pose Estimate,然后给定一个初始位姿:
rosbag play KAIST02-small.bag --clock最后运行的结果为:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/116710
推荐阅读
相关标签

